






前言
本文作为非线性求解技术的第二部分内容,重点对非线性分析中的稳定性问题—屈曲进行叙述,主要介绍了非线性屈曲分析中的弧长法和稳定性控制,并通过一个案例对两种方法进行比较,之后对ANSYS中用到的求解器进行简要介绍。
5. 非线性稳定性问题
非线性问题收敛失败可能是由于有限元模型中的数值问题引起的,有些则可能是由于结构产生了物理上的不稳定,在屈曲分析章节中,我们讲过了如何在屈曲分析中辨别这种不稳定的产生原因,本节内容是对屈曲章节的补充。
对于克服数值不稳定,ANSYS提供了多种办法,如选择恰当的单元类型,使用自动时间步,打开线搜索等,以及根据求解信息中的提示对模型进行修正。对于解决物理不稳定——屈曲问题,在屈曲文章中提供了三种解决方法,弧长法、稳定性控制和瞬态分析,下面仅对前两种方法进行详细描述。
5.1 弧长法
5.1.1 牛顿法的局限性
牛顿法的缺陷就是一旦切线刚度变为0,该方法就无法计算极值点过后的载荷-位移曲线了,如下图中的A点,A点之后的载荷-位移变化无法通过牛顿法计算获得。这一缺点产生的根本原因在于,迭代过程中载荷增量是不变的。有时候我们使用位移加载可以越过A点,但位移加载也会遇到同样的问题,如下图中的B点。

5.1.2 弧长法原理
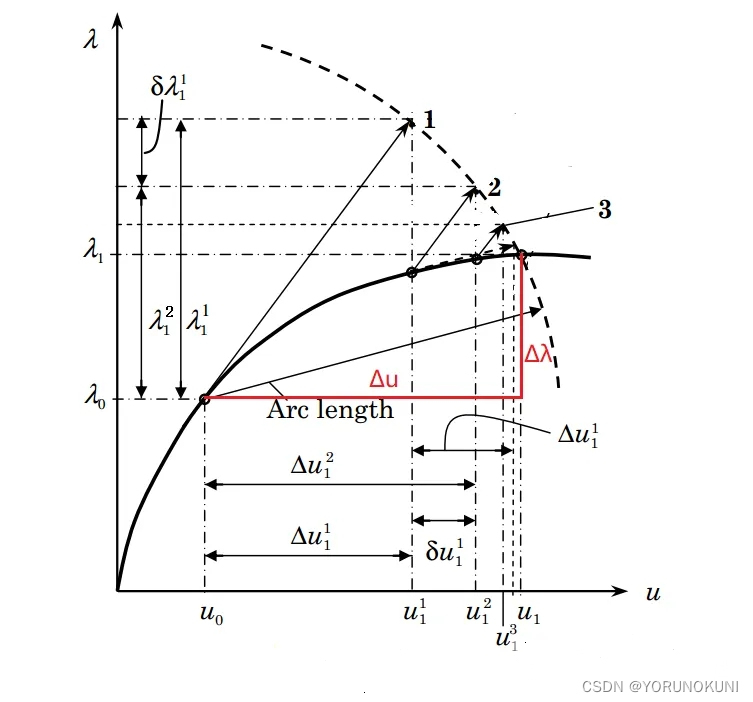
弧长法在牛顿法的基础上通过引入外载荷比例因子,对无法越过极值点的缺陷进行了修正,可有效地分析结构非线性屈曲,以及对屈曲路径进行追踪。弧长法的分析过程可以描述为求解下等式:
(5.1)
其中λ为外载荷比例因子,在每次迭代过程中也会更新,这样系统中除位移u之外又多了一个变量,所以也需要再增加一个限制方程去求解λ,初值点到下一个收敛点之间的关系可以表示为下式,即附加的约束方程:
(5.2)
其中和
都是人为设置的参数,
为弧长,
为载荷因子的系数。根据式(5.2)形式的不同,弧长法也可以分为Riks Arc-Length、Modified Riks Arc-Length和Crisfiled Arc-Length等多种弧长法,ANSYS中应用的就是Crisfiled Arc-Length,对应的载荷因子系数
=0,目前只支持载荷加载;ABAQUS中使用的是Modified Riks Arc-Length,其中
=1,可以支持载荷加载和位移加载。也有的文章中将
=0时的弧长法称为柱面弧长法,
≠0时的弧长法称为球面弧长法。
5.1.3 收敛控制
这一小节主要讲解在ABAQUS中如何设置弧长法,以及设置界面中参数的含义。
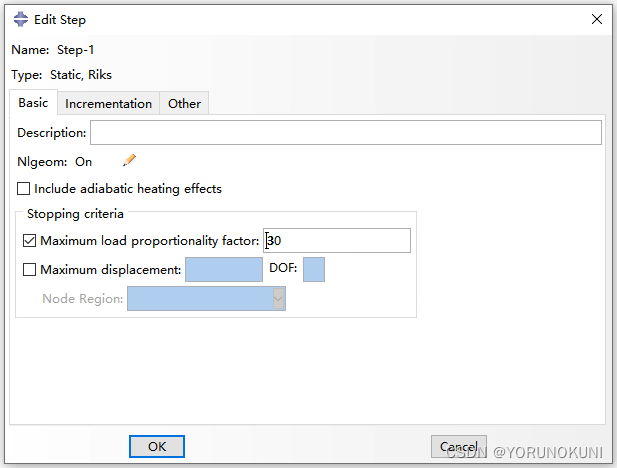
在基础设置Basic中可以人为控制的参数有三个,由于计算中的载荷和位移都是未知量,因此弧长法无法根据参考载荷值获得精确解,Basic中的选项是备选的终止条件,即如果迭代过程中达到了力收敛准则,又或者迭代中的参数超过了Basic中的设置条件,则计算终止;如果没有设置这些条件,则当达到最大增量步数或求解失败时,计算终止。
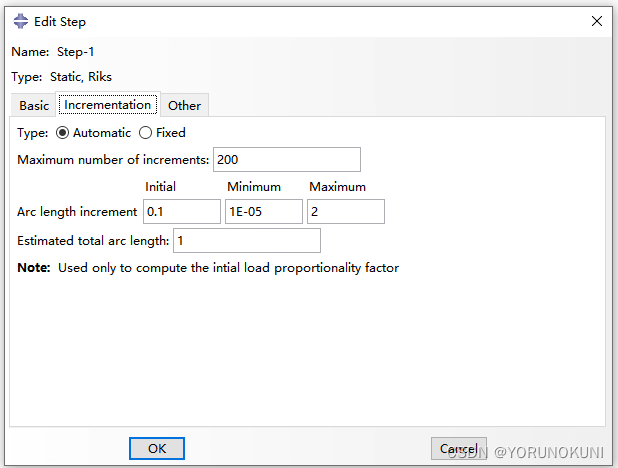
在增量设置(Incrementation)中需要指定的参数都与弧长和载荷比例因子有关,选择Automatic之后,在迭代过程中弧长的增量可以由程序计算得到,但是仍要对弧长增量的范围进行设置。不推荐使用Fixed,选择固定后弧长增量会变为常数,适应性很差。
- 最大载荷比例因子(Basic):在迭代过程中,当λ超过了设定值,计算终止;
- 自由度与最大位移(Basic):当某个某个节点的指定自由度超过了设置的位移值,计算终止;
- 最大增量步数(Incrementation):在本次分析中允许的最多增量步数;
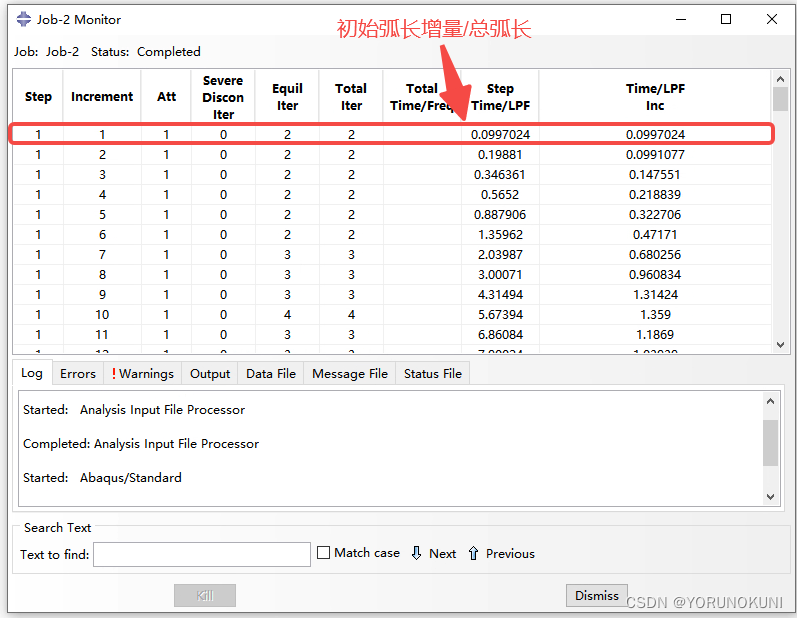
- 初始弧长增量(Incrementation):程序根据式(5.3)初始弧长增量和总弧长的比值来计算载荷比例因子的增量
,但仅在第一次迭代时使用这个值,之后的
- 最小/最大弧长增量(Incrementation):弧长增量的范围;
- 总弧长(Incrementation):一般默认设置为1不变;
(5.3)
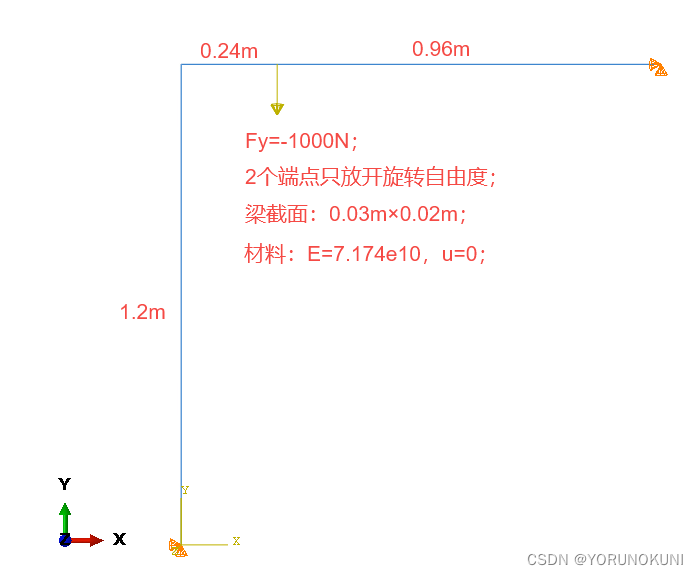
实例3:L形框架的线性屈曲和非线性屈曲
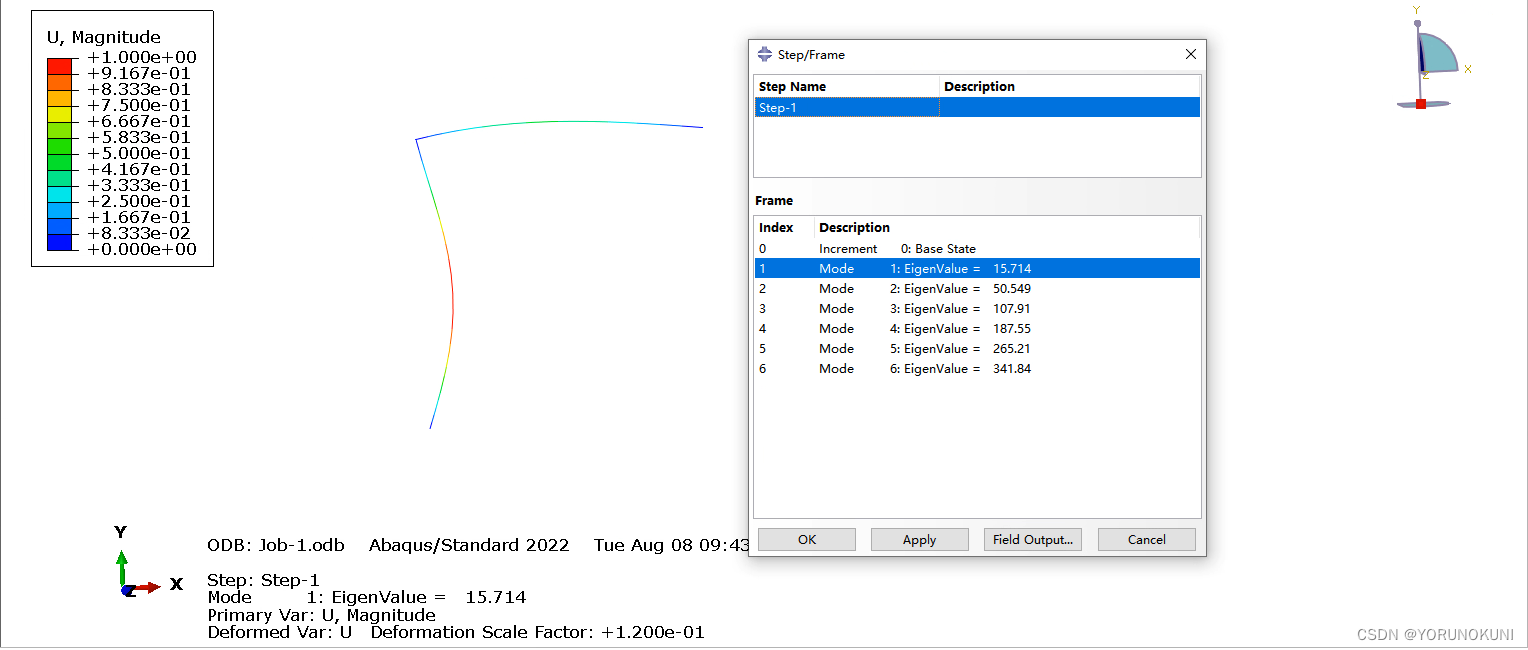
1)使用“线性摄动分析-屈曲”分析类型,计算结果如下图所示,载荷为15714N;
2)使用静力Riks分析类型,追踪受力处节点的载荷-位移曲线,观察弧长法对后屈曲的分析过程;
a. 结构的变形如下图所示,可以看出随着载荷的增加结构逐渐失稳,在后处理也可以显示出每一步对应的弧长。
b. 支反力和位移随弧长的变化如图所示:
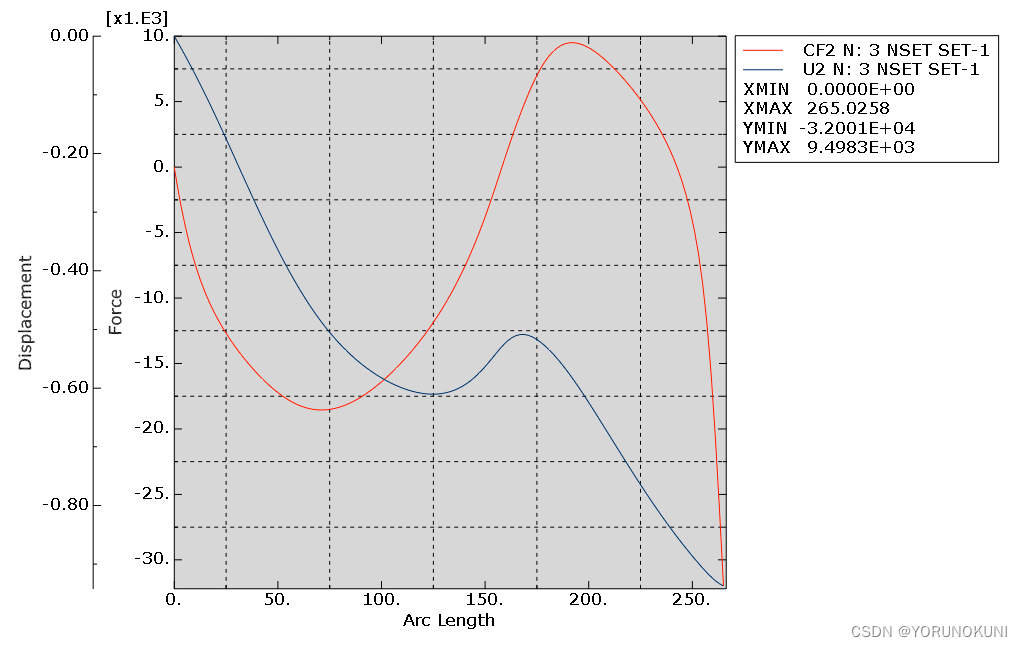
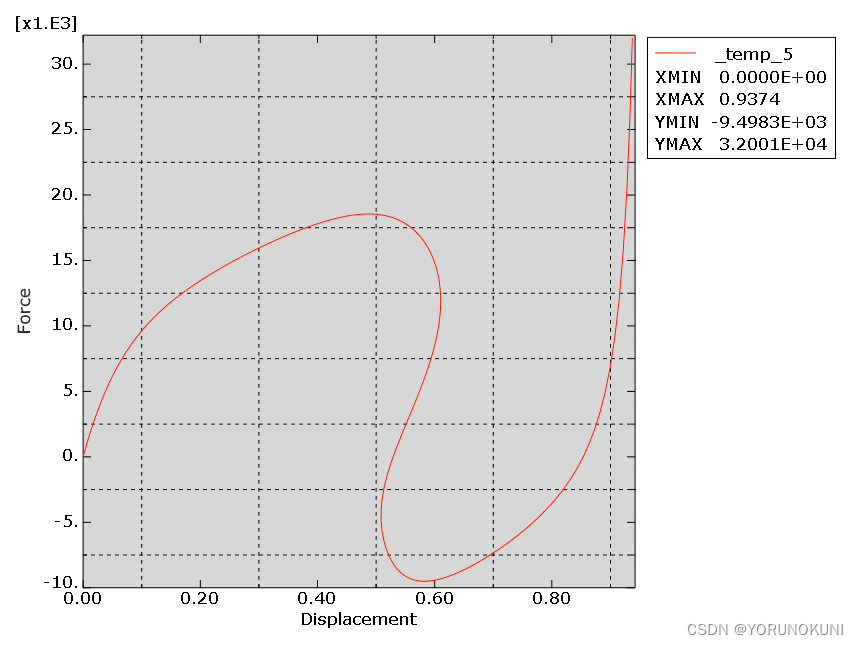
c. 载荷-位移曲线如图所示,可以看出弧长法可以很好的越过刚度为0的点追踪后屈曲的路径,发生第一次屈曲时的临界载荷大约在18000N前后,由于在分析过程中没有设置材料的非线性,导致临界载荷比线性屈曲算出来的值稍大。
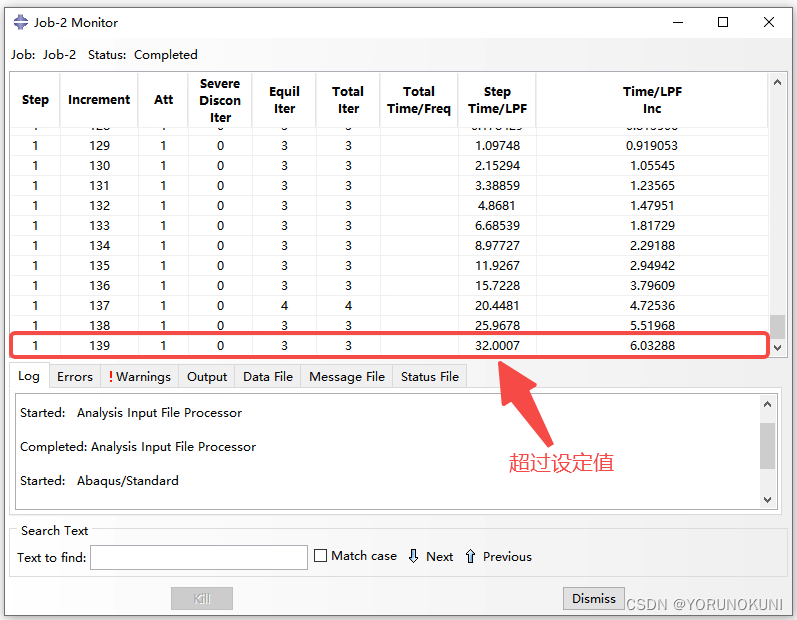
d. 检查求解过程可以看出,当载荷比例因子大于设置的最大值30时,计算结束。与此同时,第一次迭代时的载荷比例因子是初始弧长增量和总弧长的比值。
5.2 稳定性控制
本节是对屈曲文章中稳定性控制内容的补充,在前文的基础上对参数设置方面进行更为详细的描述,由于人为引入了阻尼,因此也要评估结果的准确性,最后在Workbench中使用该方法对L形框架进行非线性屈曲分析,与5.1中的结果进行对比。
5.2.1 原理与设置
弧长法可以很好地追踪结构的载荷-位移曲线,在分析全局屈曲时具有很大的优势,而稳定性控制通过引入阻尼单元来控制结构的稳定性,更适合解决结构的局部失稳问题。在屈曲文章中主要讲了能量耗散率的定义和设置,忽略了另一种阻尼的设置,下面对这部分进行补充。
在ANSYS中对于何时使用能量耗散率和阻尼系数给出了建议,可以先使用能量设置进行试算,之后通过重启动设置阻尼系数。在第一次试算中,程序通过设置的能量耗散率会计算出一个阻尼系数,在求解信息中就可以查看到,这个值可以作为阻尼设置中的参考值。阻尼系数的设置范围要比能量耗散系数宽泛一些,在如下情况可选择使用阻尼系数:
- 分析的结构对能量耗散系数比较敏感时;
- 能量试算,重启动设置阻尼求解;
5.2.2 结果检查
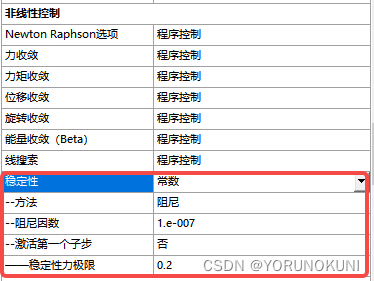
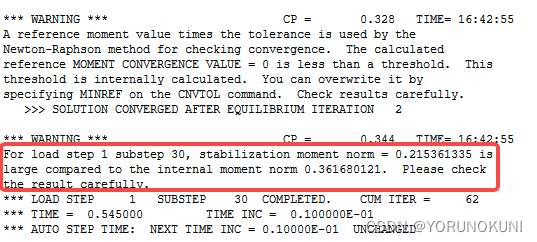
根据稳定性控制的原理可知,用于稳定系统的阻尼力是人为添加的,在计算完成后如果阻尼力过大,那么会对结果的准确性产生影响,因此要通过阻尼力,稳定能和应变能等数值,对结果的准确性进行检查和评估。上图中的“稳定性力极限”参数就是用来检验阻尼力或者说稳定力的。当稳定力的L2范数超过系统内力的L2范数和稳定性力极限的乘积时,系统会给出提示信息,显示稳定力数值过大。当出现这个提示时,我们可以通过调节能量耗散率或阻尼系数来减小产生的稳定力。
实例4:L形框架的非线性屈曲
在Workbench使用稳定性控制计算实例3中的模型,需要注意的设置如下:
1.对模型施加Y向载荷-25000N,打开大变形和重启动提交计算,因为发生失稳所以结果报错;
2.在非线性设置中打开稳定性,设置能量耗散率,从前面的收敛步开始重新计算;
3.若结果仍不收敛则调节能量耗散率的数值,重新计算直至得到收敛的结果。
结果分析:
a. 结构的变形过程如下图所示,可以看出ABAQUS结果的差异,ANSYS的位移结果在某一刻发生了突变,不像弧长法那么均匀的显示出结构的变形过程,在下面也会分析,正是因为这个突变使得稳定力和稳定能出现激增。本算例中加载的力是-25000N,图20中显示的是-32000N下的位移结果,所以位移的最大值不一样,相同载荷下ABAQUS的结果如图27所示,位移为1371mm,两个结果的误差很小。
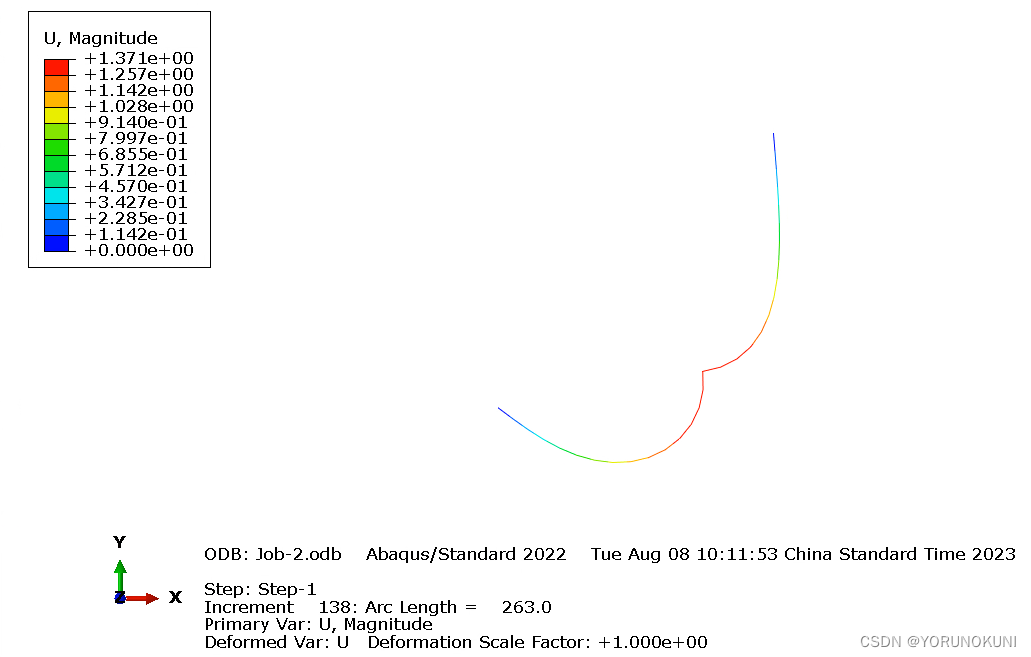
b. 在计算完成后出现了提示信息,显示稳定力/力矩要大于内力/力矩,在求解信息中可以查询到相应的数据。同时结构的稳定能也要大于结构的内能,主要原因是由于结构突变发生了物理上的失稳,但是对比失稳载荷数值后发现结果时可靠的。
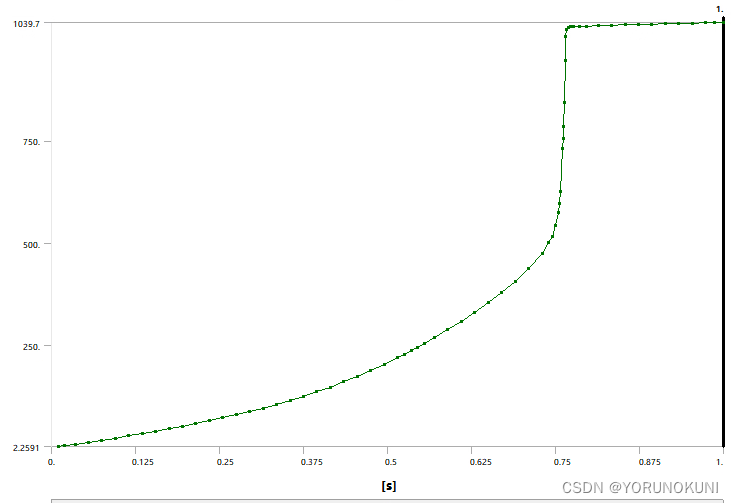
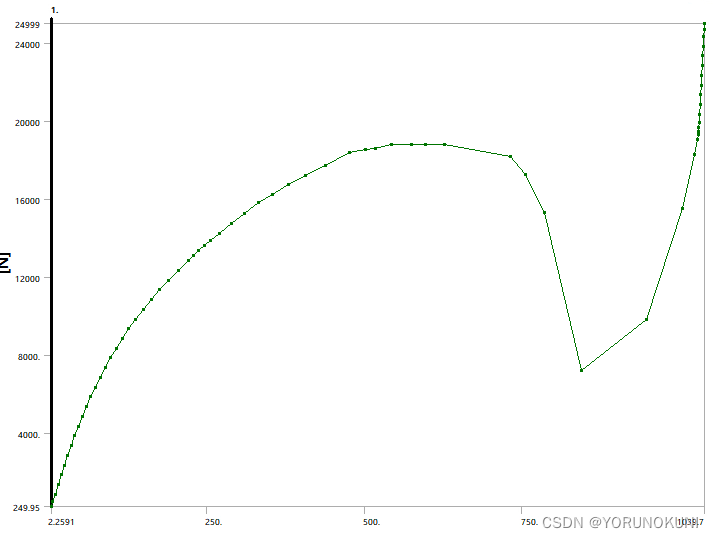
c. 查看Y向位移变化以及载荷-位移曲线,图29中横轴是时间,纵轴是Y向位移的变化,可以看到在0.75s前后位移发生了突变,可以认为在该处结构发生了屈曲,相应的屈曲载荷可以大致计算为25000N×0.75=18750N;绘制载荷-位移曲线,从图中可以看出,使用稳定性控制可以计算出第一次发生屈曲时的临界载荷,查询表格数据得到载荷为18819N,但是由于算法及参数设置等原因,该方法并不能像弧长法一样追踪到完成并顺滑的载荷-位移曲线,使用当前设置只能计算出第一次屈曲时的临界点!
6. 求解器类型与选择
6.1 求解器类型
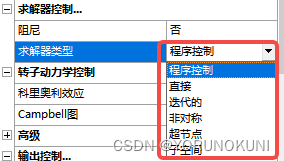
ANSYS中设置了多种求解器,以下图为例,在静力分析中有直接求解器和迭代求解器,在模态分析中类型更多,有直接、迭代、子空间等等。虽然在很多时候我们不用手动去修改这些设置,让程序自动选择合适的求解器即可,但这部分知识我们还是要了解一下,不然有些人会有疑问,这求解器是干什么用的,又或者我们明明使用了牛顿迭代法去计算,怎么还会选直接求解器,这两者会不会有什么冲突?之所以会存在疑问,根本原因还是对求解器的内容不了解所致,下面我们将对直接求解器和迭代求解器进行详述,至于模态相关的求解器,在后续涉及到模态分析时也会进行补充。

6.2 直接求解器
6.2.1 计算原理
对于线性方程组的数值解法分为两类:直接求解和迭代求解。ANSYS中的直接求解是将式(2.1)中的刚度矩阵K进行LU分解,之后逐步去计算位移u。运用直接求解法计算有限元基本方程的过程见下式,核心思想就是将刚度矩阵进行分解:
(6.1)
(6.2)
(6.3)
之后先计算出向量w,再根据w计算出位移u。当K为对称阵时可以分解为两个下三角矩阵和一个对角矩阵:
(6.4)
所以式(6.1)又可以写成:
(6.5)
通过计算上式就可以得到位移变量u了,这就是直接求解的过程。显而易见,当我们使用牛顿迭代时,如果选择了直接求解器,那么在计算位移增量即式(2.2)时就会用到上面的方法了,可见直接求解器和牛顿迭代法并不冲突。
6.2.2 使用场景
直接求解器也称为稀疏矩阵求解器,是ANSYS中的默认求解器,只能用于静力分析、瞬态分析、完全法的谐响应分析和随机振动分析(PSD)中,可用于解决线性和非线性问题。当模型接触状态发生改变,或者模型中包含梁、壳和实体等多种单元相互作用时,可以选择直接求解器,但直接求解往往会占用较多内存,计算时需要保证内存充足。
6.3 迭代求解器
ANSYS中提供了很多迭代求解器,但是在一般情况下迭代求解器并没有直接求解器稳定,比如在处理近似奇异矩阵或包含拉格朗日乘子的矩阵时,直接求解器更有效。迭代求解器是基于共轭梯度法的,与直接法对刚度矩阵K进行分解不同,迭代法需要对位移变量u进行迭代。ANSYS中有三种迭代求解器,JCG雅各比共轭梯度求解器、PCG预处理共轭梯度求解器以及ICCG不完全Cholesky共轭梯度求解器,Workbench中的迭代求解器默认为PCG。该求解器可用于求解大模型,相较直接法在计算时占用内存较少,但只能用于静力分析、完全法的瞬态分析和模态分析中,同时也可处理网格畸变、接触和材料塑性引起的病态矩阵。使用迭代求解器时,未收敛的情况通常是由于边界约束数量不足导致的,不能让结构发生刚体位移。
7. 总结
本文主要对屈曲分析中涉及到的理论进行讲解,附带对ANSYS中的求解器进行说明。
文中如有错误还请大家批评指正!















 3904
3904











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









