






点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者:黄浴
https://zhuanlan.zhihu.com/p/139150194
本文转载自知乎,作者已授权,未经许可请勿二次转载。
这里重点是摄像头运动估计和定位,不是地图或者路标(landmark)。以前大家都知道SLAM结合深度学习最多的是语义SLAM,比如语义分割和语义目标识别。而这里强调的是里程计和定位。另外,忽略一些特征提取和匹配的方法。
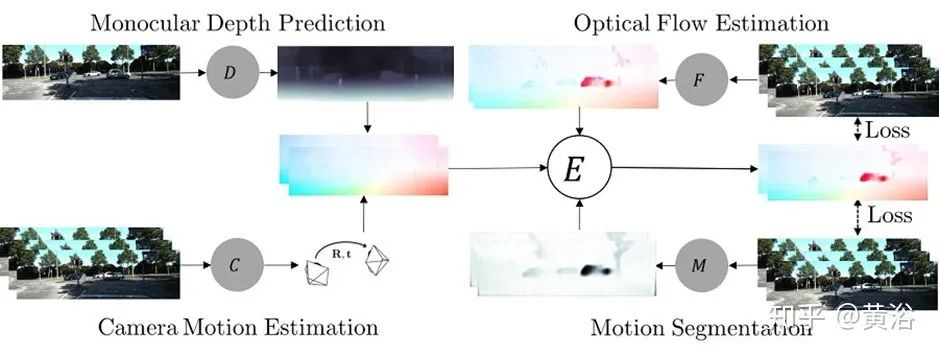
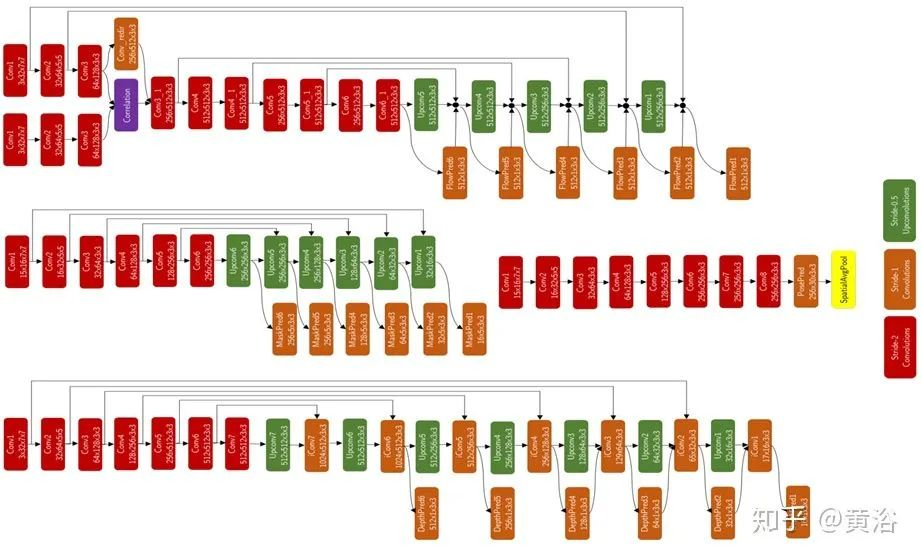
1.DEMON
https://github.com/lmb-freiburg/demon
其方法如图所示


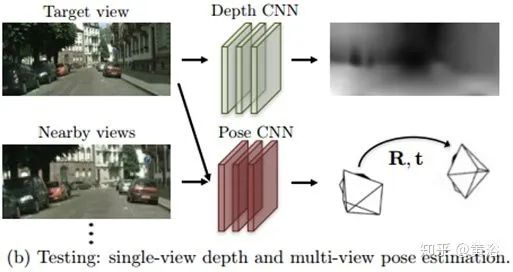
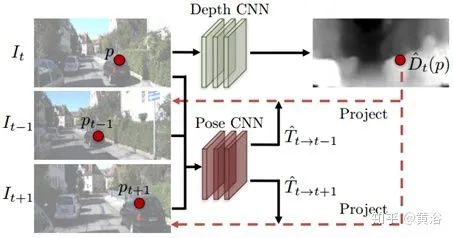
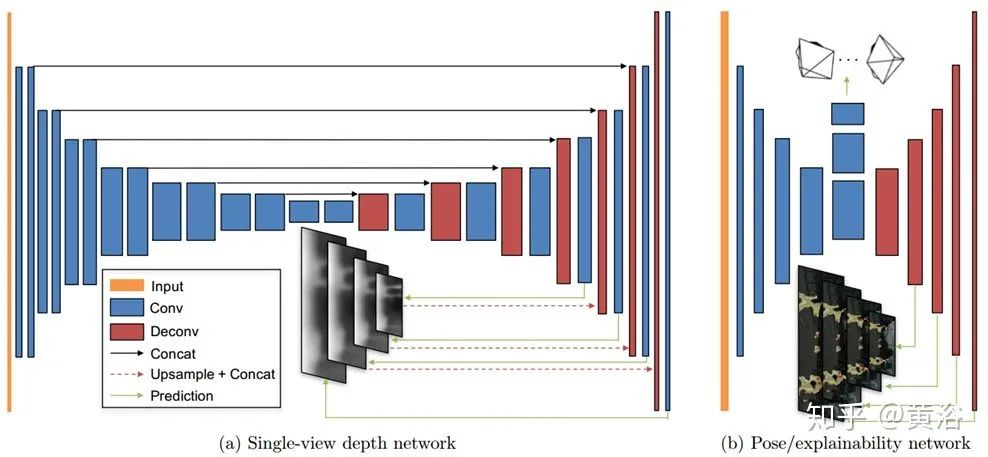
2. SfM Learner
https://github.com/tinghuiz/SfMLearner
方法如图

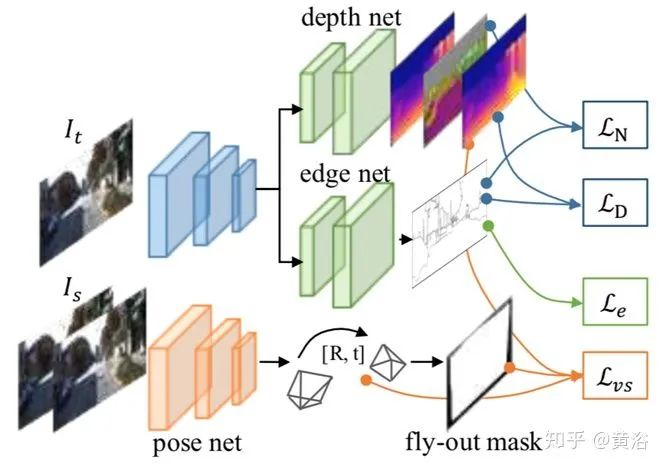
3. LEGO
https://github.com/zhenheny/LEGO
方法如图
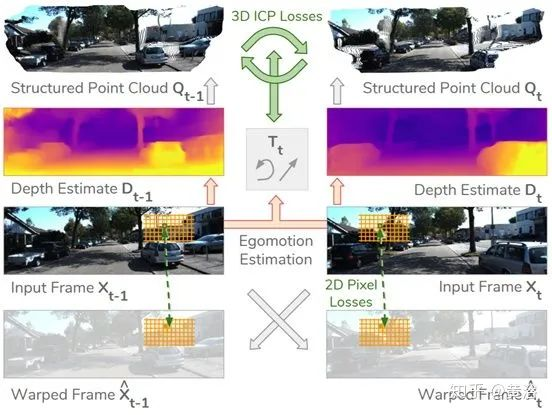
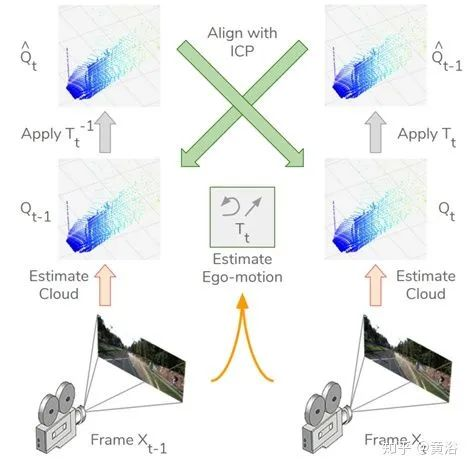
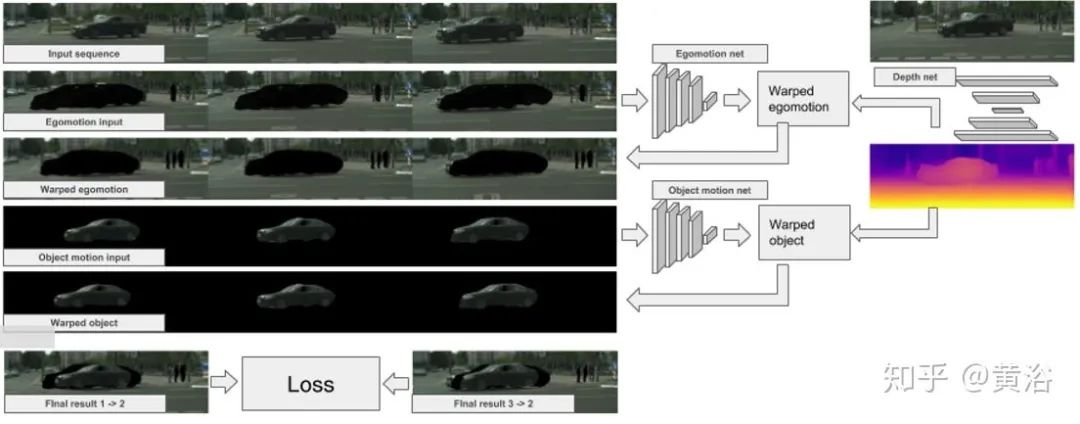
4. Vid2Depth
https://sites.google.com/view/vid2depth
方法如图
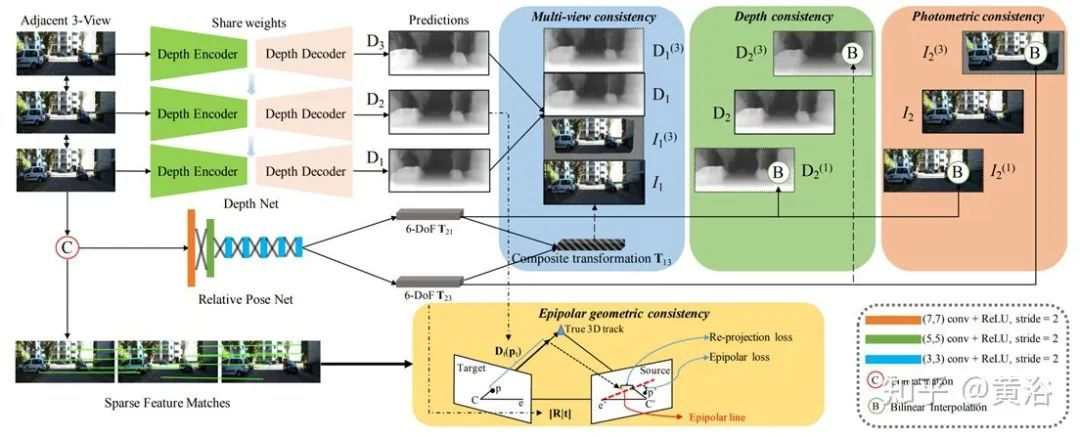
5. DeepMatchVO
https://github.com/hlzz/DeepMatchVO
方法如图

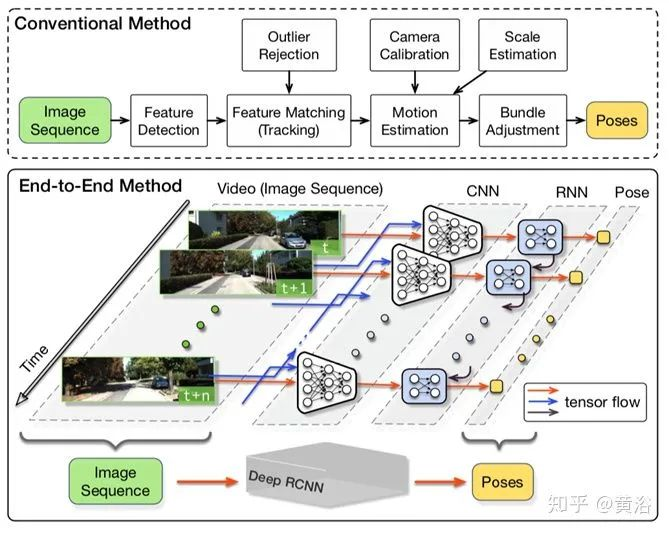
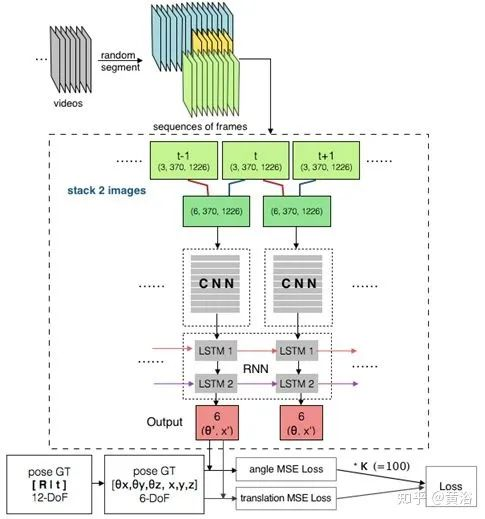
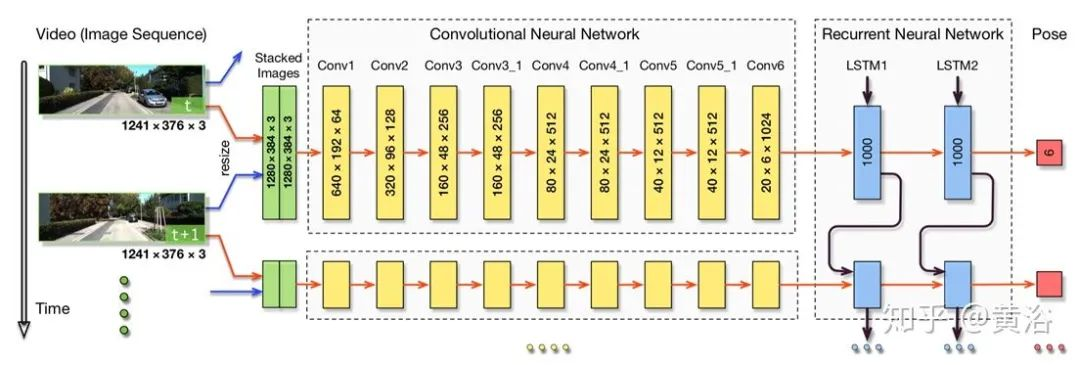
6. DeepVO
ChiWeiHsiao/DeepVO-pytorch
krrish94/DeepVO
方法如图
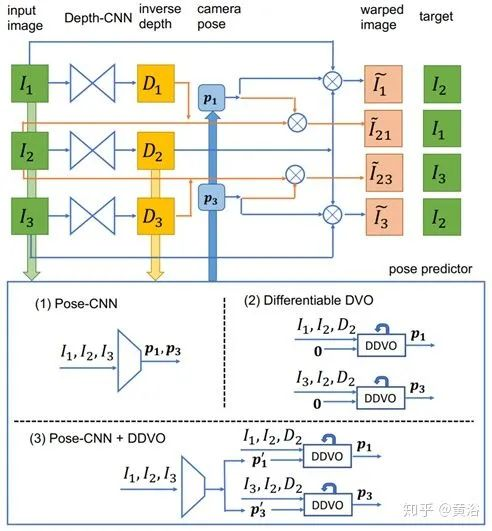
7. DDVO
https://github.com/MightyChaos/LKVOLearner
方法如图
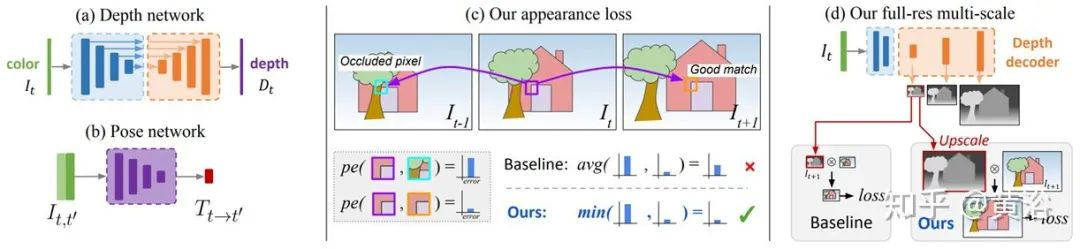
8. MonoDepth2
https://github.com/nianticlabs/monodepth2
方法如图
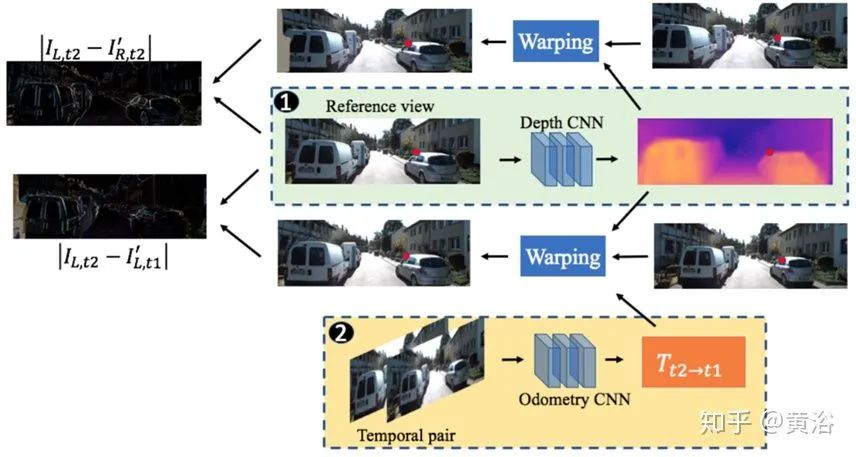
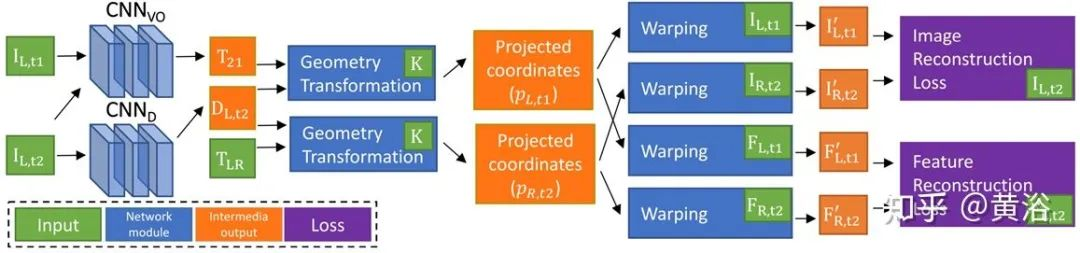
9. Depth VO Feat
Huangying-Zhan/Depth-VO-Feat
方法如图
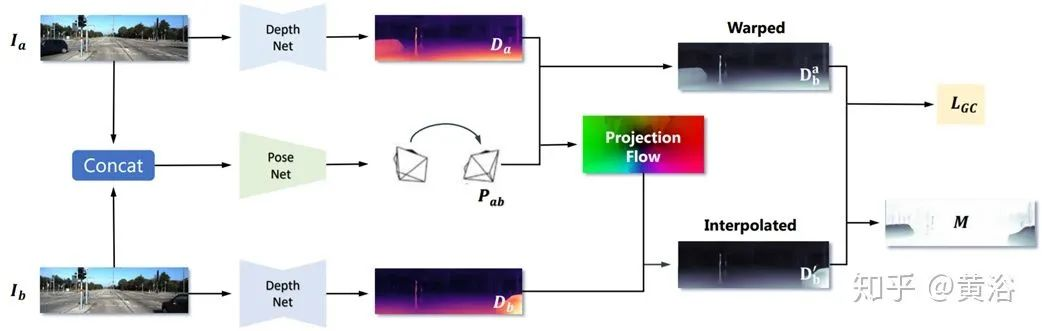
10. SC SfM Learner
https://github.com/JiawangBian/SC-SfMLearner-Release
方法如图
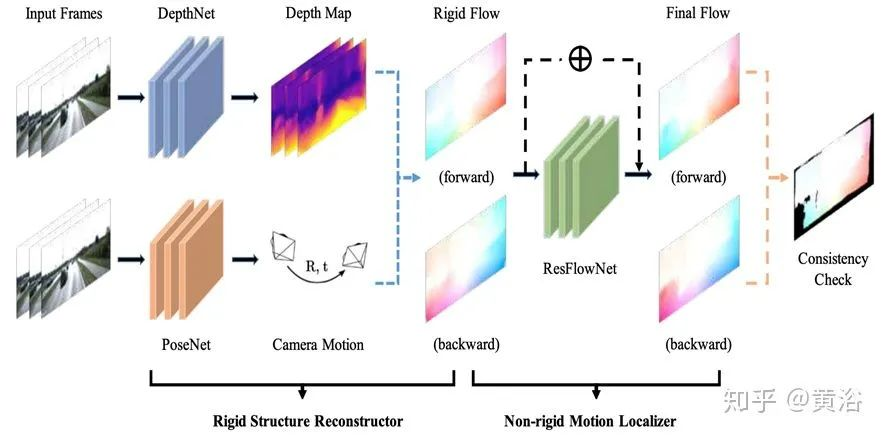
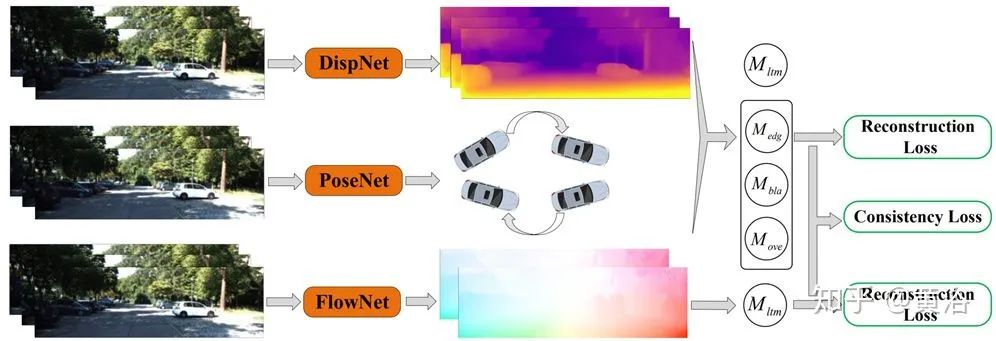
11. GeoNet
https://github.com/yzcjtr/GeoNet
方法如图
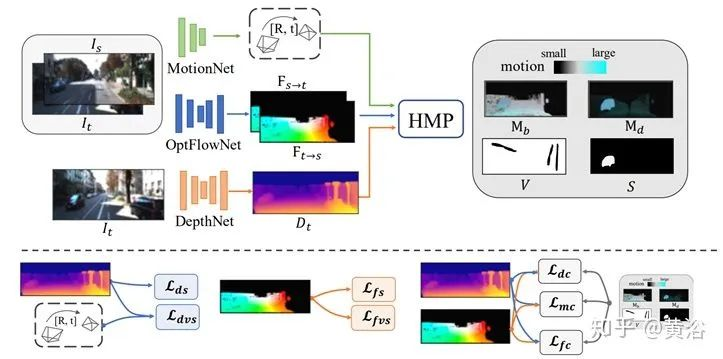
12. Nvidia CC
https://github.com/anuragranj/cc
方法如图
13. DOP Learning
https://github.com/guangmingw/DOPlearning
14. EPC
https://github.com/chenxuluo/EPC
方法如图
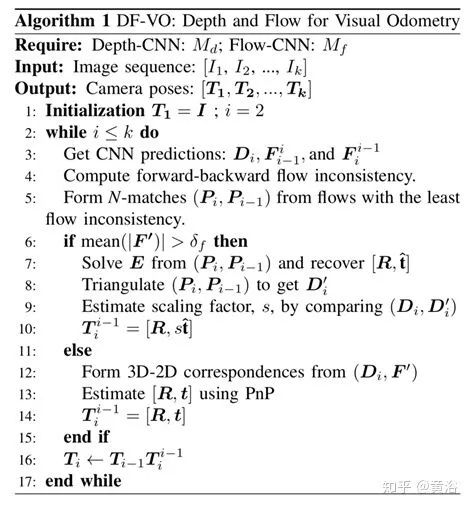
15. DF-VO
https://github.com/Huangying-Zhan/DF-VO
算法如图
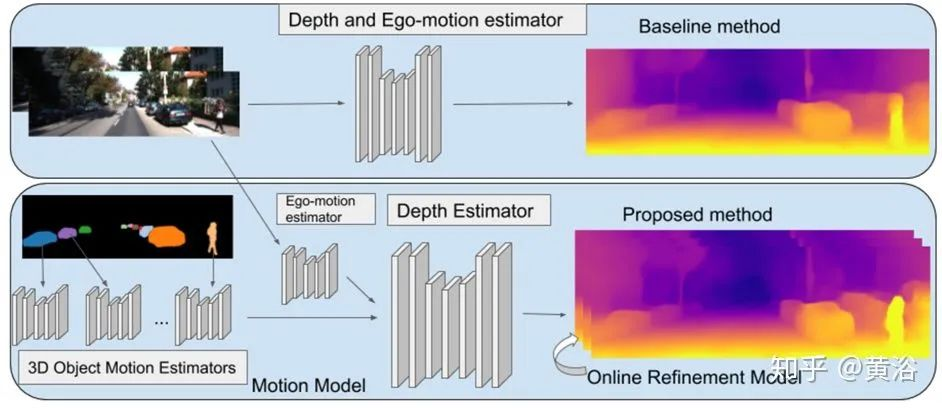
16. struct2depth
https://sites.google.com/view/struct2depth
方法如图
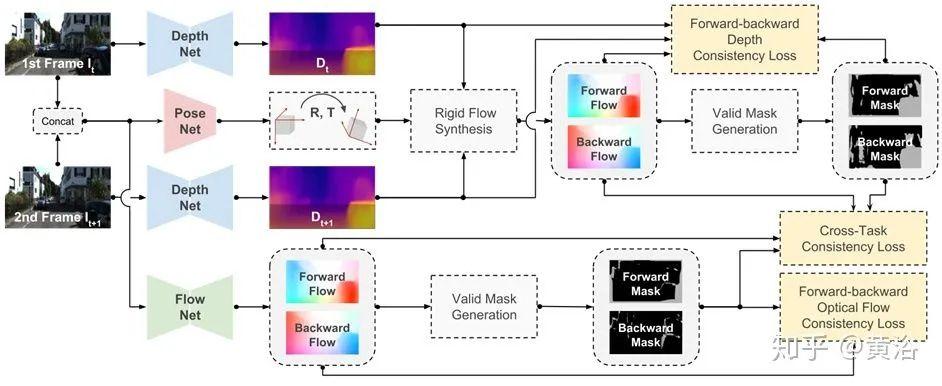
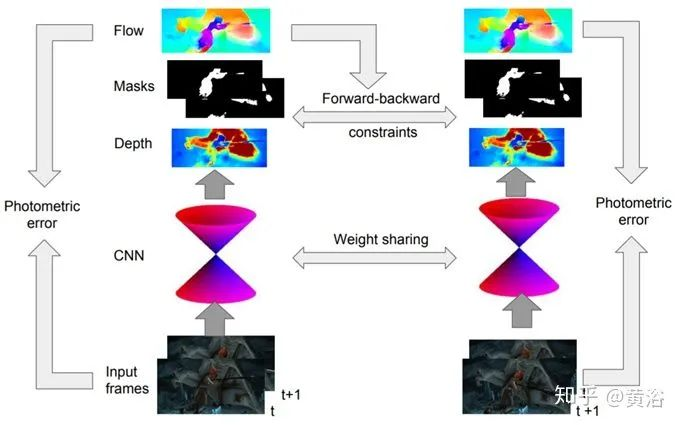
17. DF-Net
http://yuliang.vision/DF-Net/
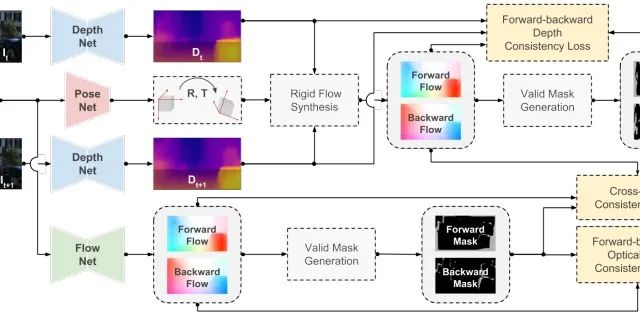
方法如图
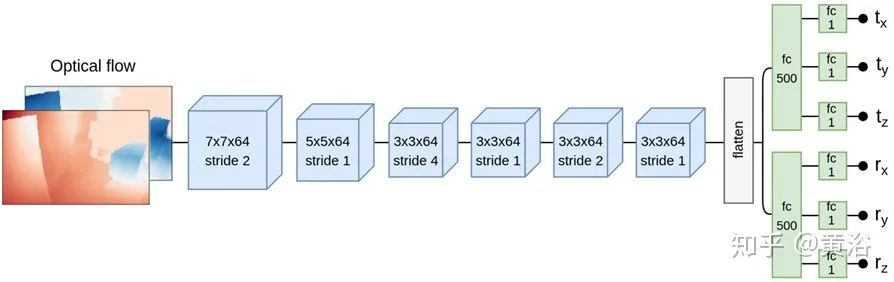
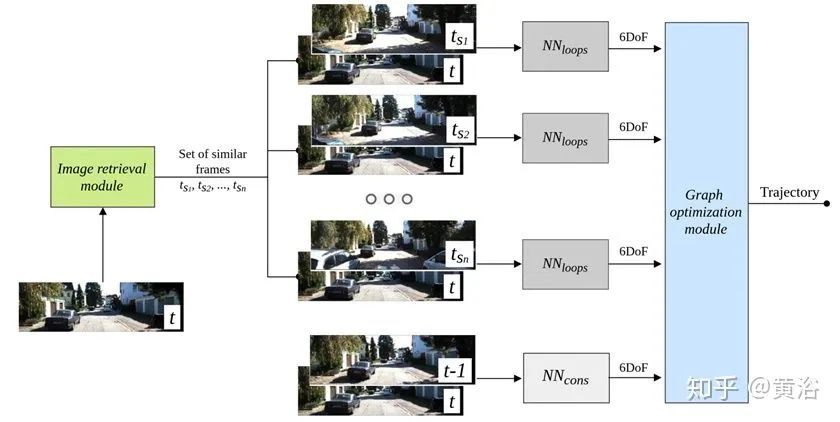
18. Samsung Odometry
https://github.com/saic-vul/odometry
方法如图
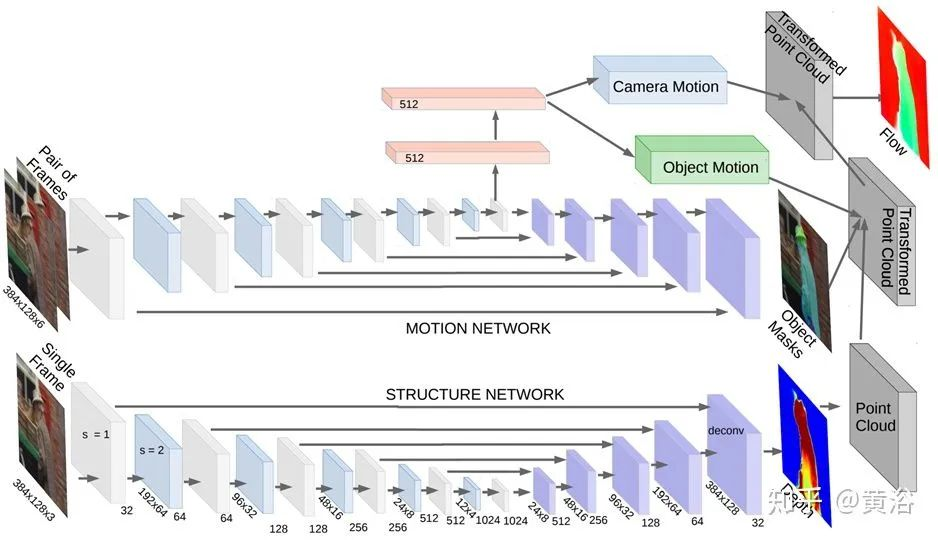
19. SfM-Net
https://github.com/augustelalande/sfm
方法如图
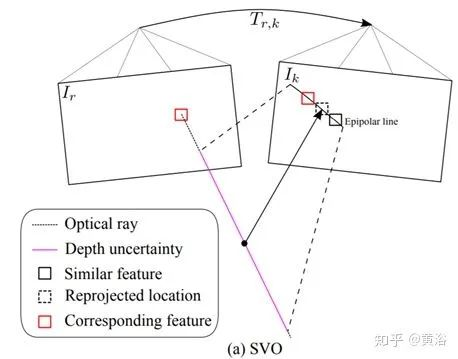
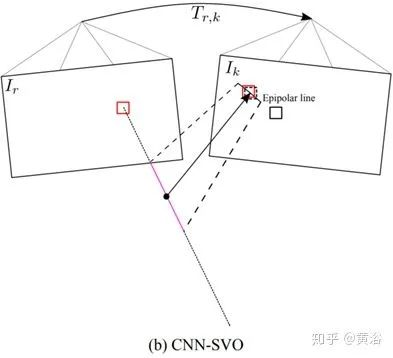
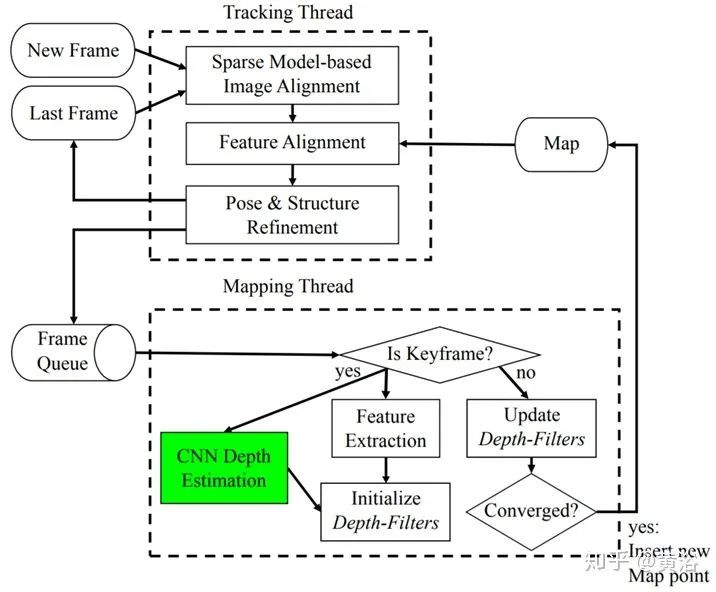
20. CNN-SVO
https://github.com/yan99033/CNN-SVO
方法如图
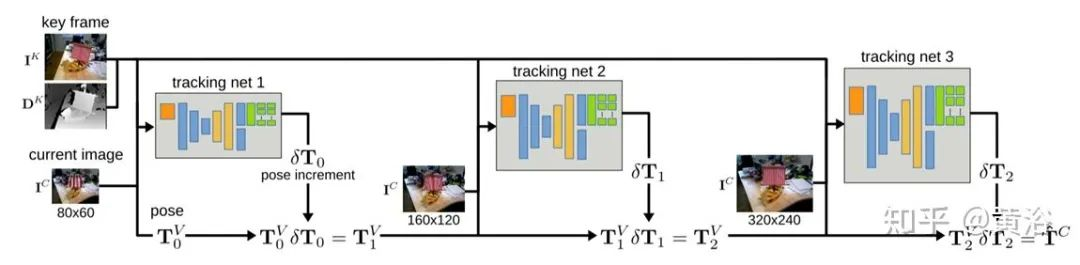
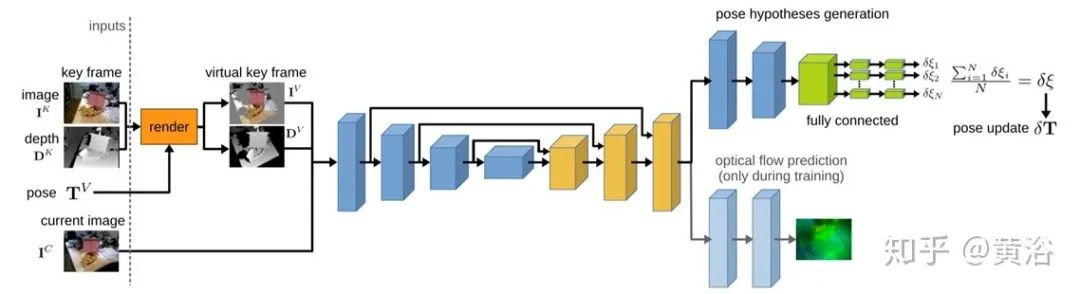
21. DeepTAM
https://github.com/lmb-freiburg/deeptam
方法如图
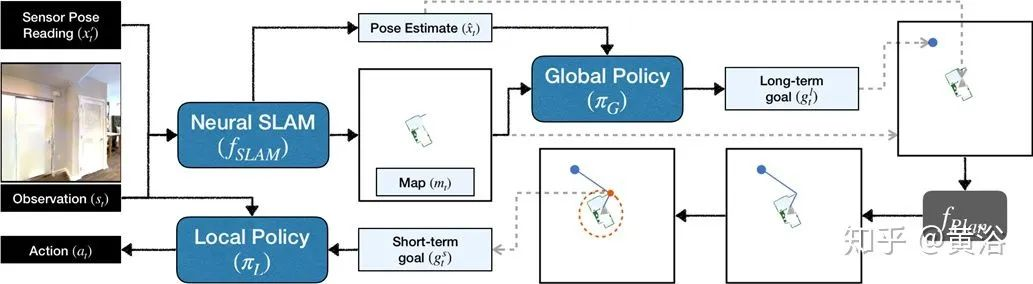
22. Active Neural SLAM
https://github.com/devendrachaplot/Neural-SLAM
方法如图

推荐阅读:
那些精贵的3D视觉系统学习资源总结(附书籍、网址与视频教程)
机器人抓取汇总|涉及目标检测、分割、姿态识别、抓取点检测、路径规划
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会(ICRA/IROS/ROBIO/CVPR/ICCV/ECCV等)、顶刊(IJCV/TPAMI/TIP等)、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近1000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、可答疑解惑、助你高效解决问题

















 1043
1043

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









