






一、课程背景
如何将多个传感器的数据处理并融合估计机器人状态,一直是机器人领域重要的研究课题。多传感器数据融合中,难点包括数据预处理,数据融合及异常处理等。
数据预处理目的在于提高单一传感器的精度。针对不同的传感器特性,需要不同的处理方法。对于陀螺仪,主要校准静态零偏,对于加速度计与磁力计,主要校准静态零偏与三轴尺度误差。有条件的情况下,还可以单独校准IMU的温漂。对于加速度计,GPS,光流,TOF等测量加速度,速度与位置的传感器,安装位置往往不在飞机重心,旋转将带来额外的测量误差,需要进行精确的运动补偿。在缺乏良好数据预处理时,估计器的参数调节变得困难,融合的精度也将降低。
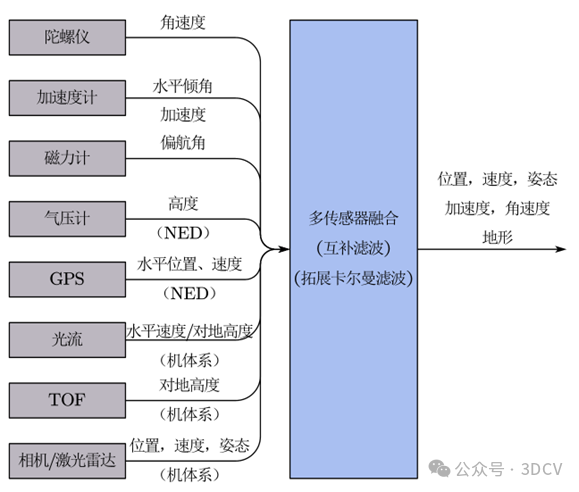
数据融合使用合适的算法,将各种传感器的数据映射为飞机的位置,速度与姿态。常见的融合算法有互补滤波,拓展卡尔曼滤波(EKF),粒子滤波等。其中EKF能够实现非线性系统状态估计,算力消耗相对较低,得到最为广泛的应用。但是,EKF本身是一个复杂的最优估计器,开源飞控PX4的EKF2算法,同时进行24维的状态优化。除了估计算法,实际各传感器时间同步,多速率等问题也需要科学地处理。
在真实的无人机系统中,还需要考虑各种传感器异常与恢复情况,否则估计器状态估计精度会明显降低,甚至不稳定。常见的异常包括传感器数据断联,传感器数据值无效,传感器数据值有效但是不准确等,这些异常处理往往在算法之外单独设计逻辑处理。
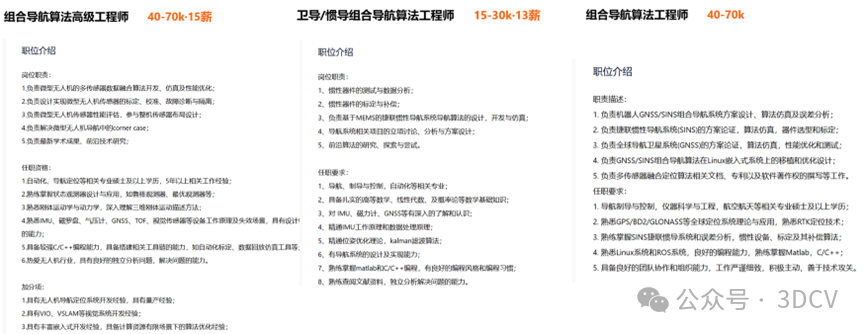
二、课程相关岗位
多传感器融合的复杂性,也使其具备良好的待遇,部分岗位如下:
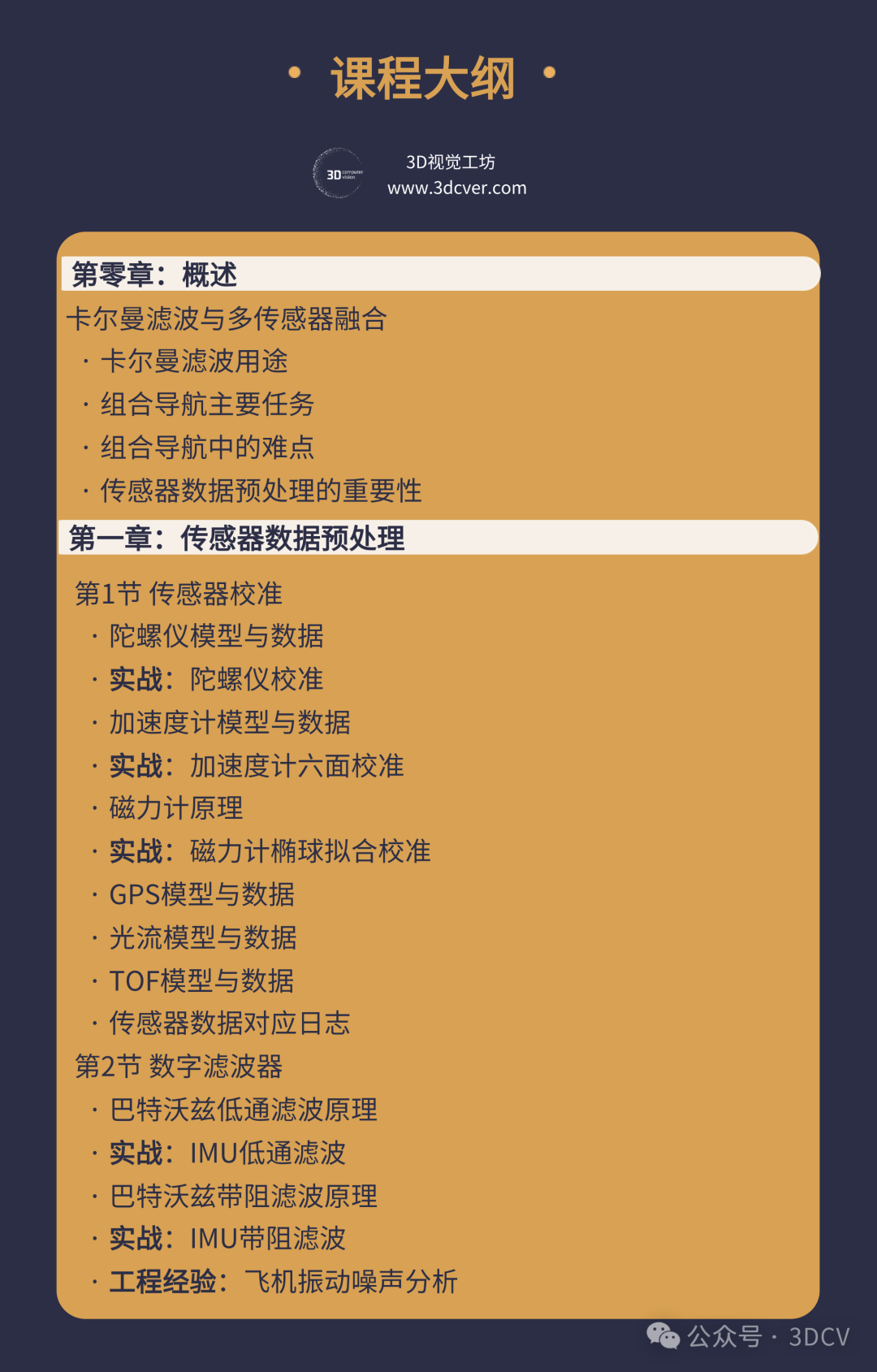
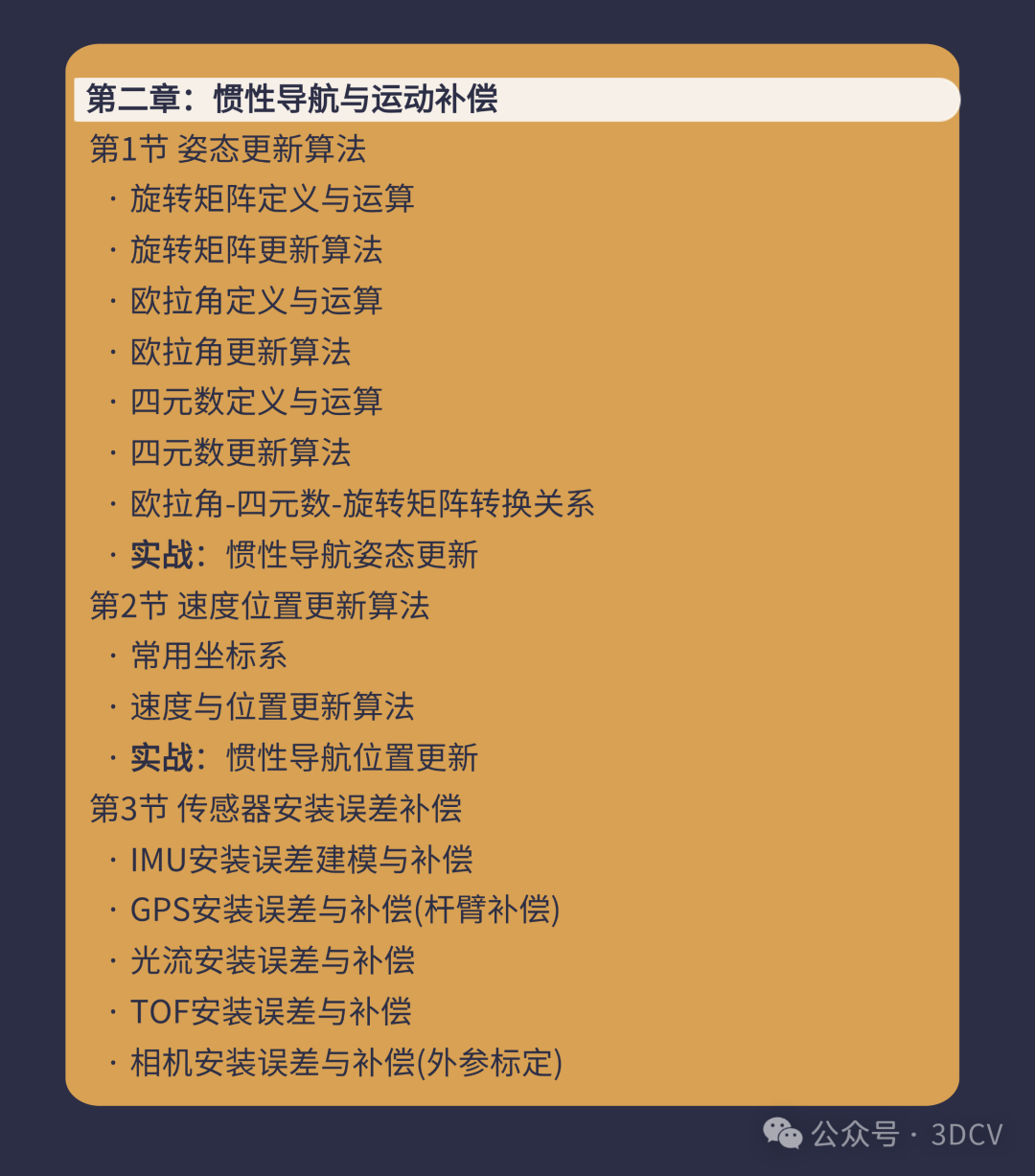
三、课程内容
课程讲解完整的从传感器原始数据到状态估计的全套多传感器融合算法,最终目标是让学员能够理解掌握PX4整套状态估计算法EKF2。课程涉及传感器模型,数字滤波器,姿态变换,刚体运动,卡尔曼滤波等众多基础知识,为理解多传感器融合奠定基础。
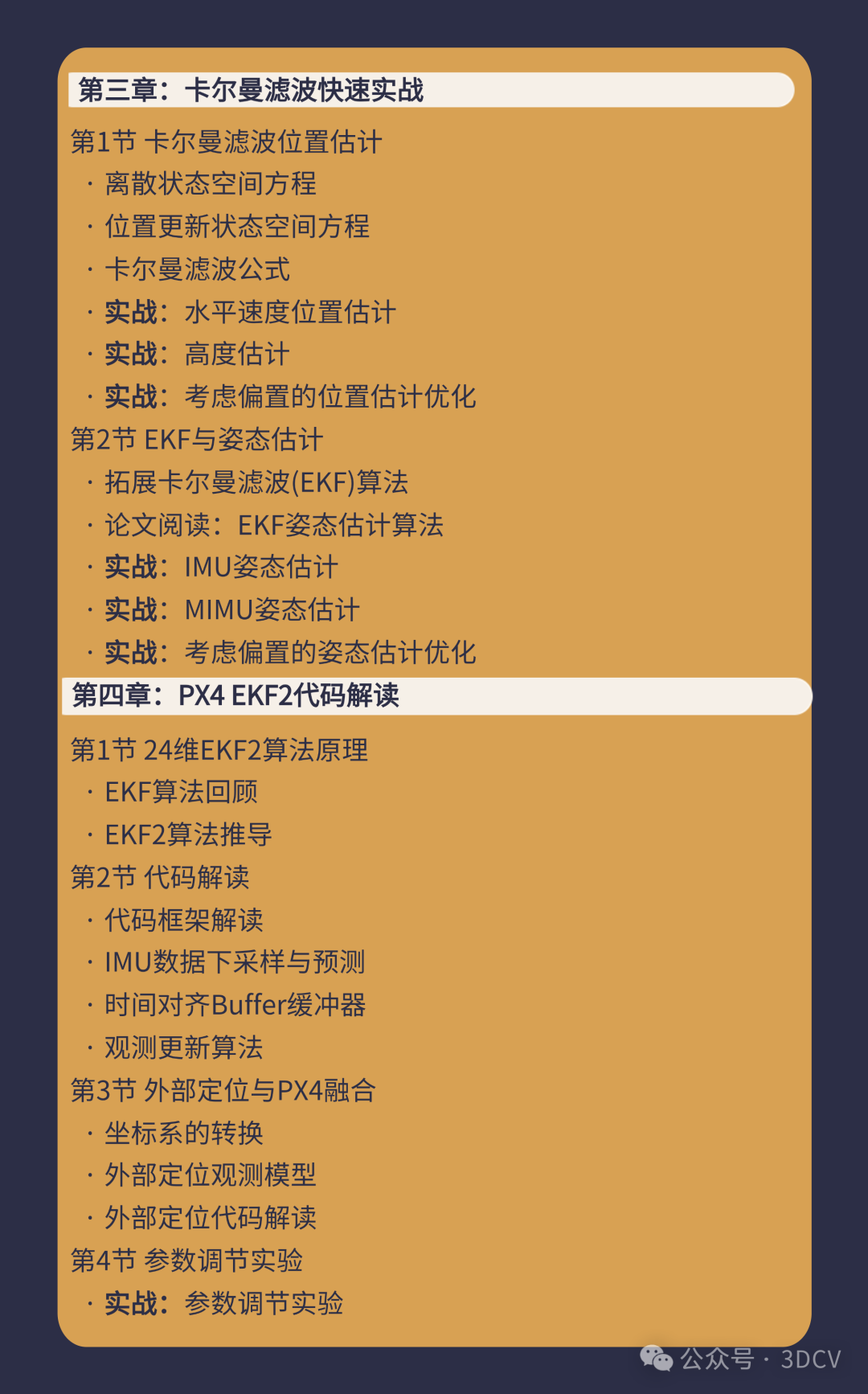
在介绍EKF过程中,课程摒弃传统的从理论入手的方法。传统EKF课程着重与理论推导,但是缺乏实践无法深刻理解EKF算法,更不能熟练运用。课程先从简单的例子入手, 从2维-4维度-7维度-24维度逐渐增加系统复杂度,直接套用公式。熟悉卡尔曼滤波的5个公式后,再学习推导将变得容易。
课程介绍PX4(v1.13.3) EKF2算法,该算法是一个庞大的工程,在PX4中总代码量接近1万行,涉及十多个文件。课程将介绍代码框架与实现细节。
四、课程优势
完整的多传感器融合框架,从传感器原始数据到状态估计;
PX4 EKF2算法讲解,包含众多工程实现中的细节处理;
深入浅出,循序渐进的讲解,干货满满。
课程具备配套无人机(需额外购买),可以自己采集数据进行分析处理。
五、适用对象
学习导航相关课程,需要实践的本科生,研究生;
机器人研发中需要传感器融合的本科生,研究生;
从事导航相关岗位的工程师。
六、答疑服务
课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题,可以随时在鹅圈子中提问。购买硬件的客户,我们将会拉一个微信答疑群,有问题可以随时群里交流,答疑有效期一年。问题可以涵盖本套硬件和代码方方面面的问题。


备注:以上图片和视频部分来自网络,如果侵犯了您的权益,还请联系删除!

















 1609
1609

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









