






多传感器信息融合,卡尔曼滤波算法的轨迹跟踪与估计AEKF——自适应扩展卡尔曼滤波算法
AUKF——自适应无迹卡尔曼滤波算法
UKF——无迹卡尔曼滤波算法
三种不同的算法实现轨迹跟踪
ID:1965614439220968
专业算法工程师
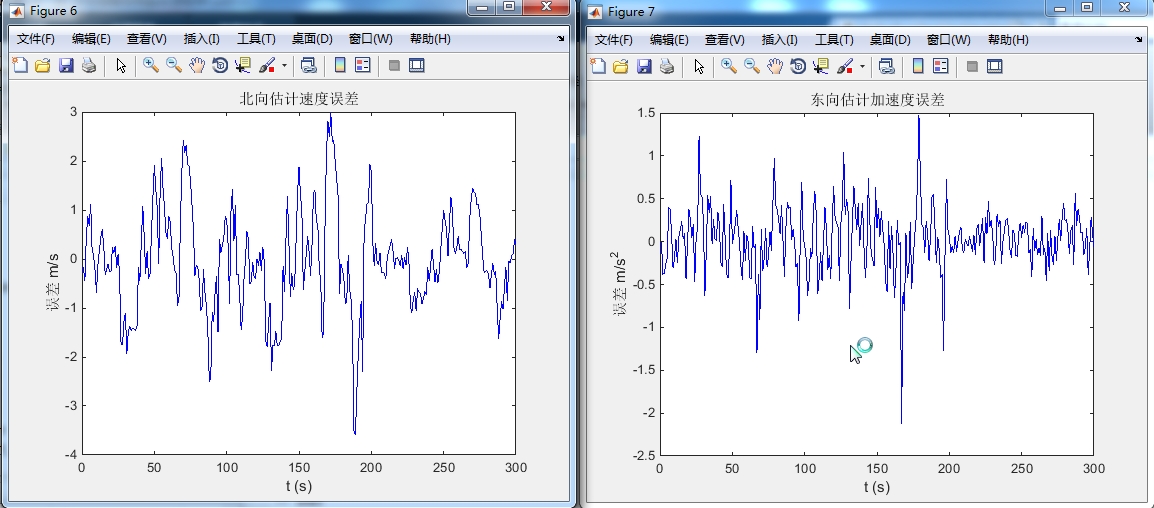
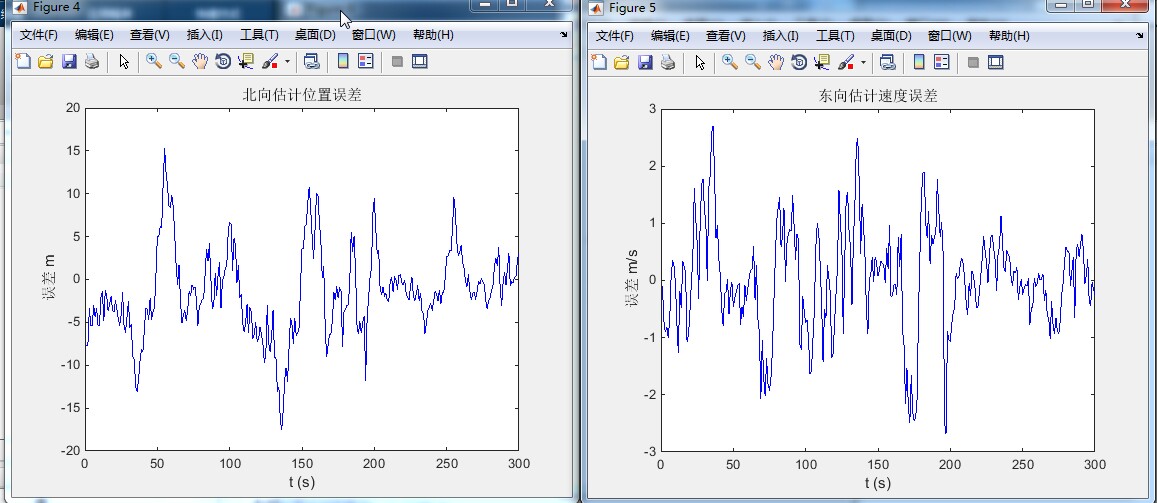
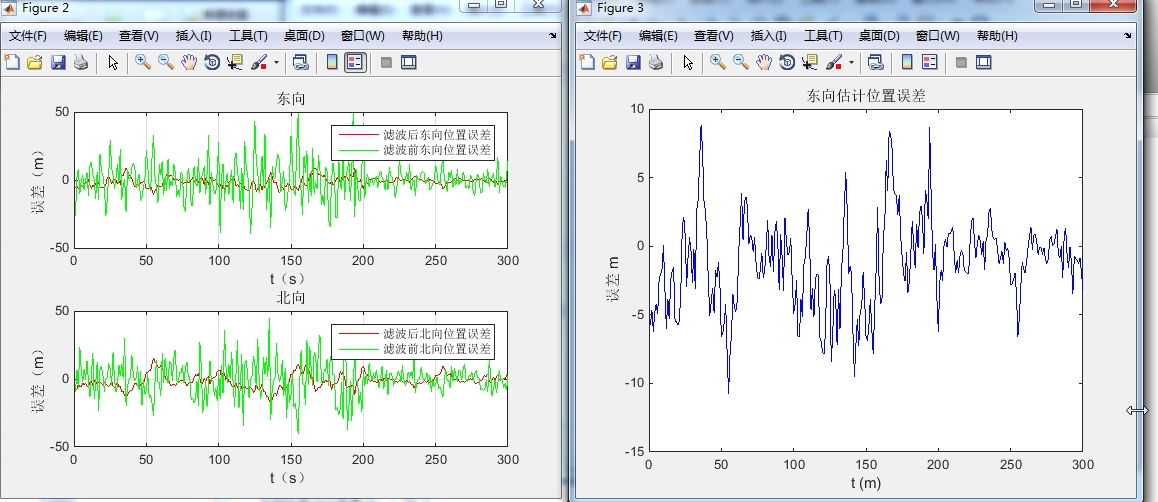
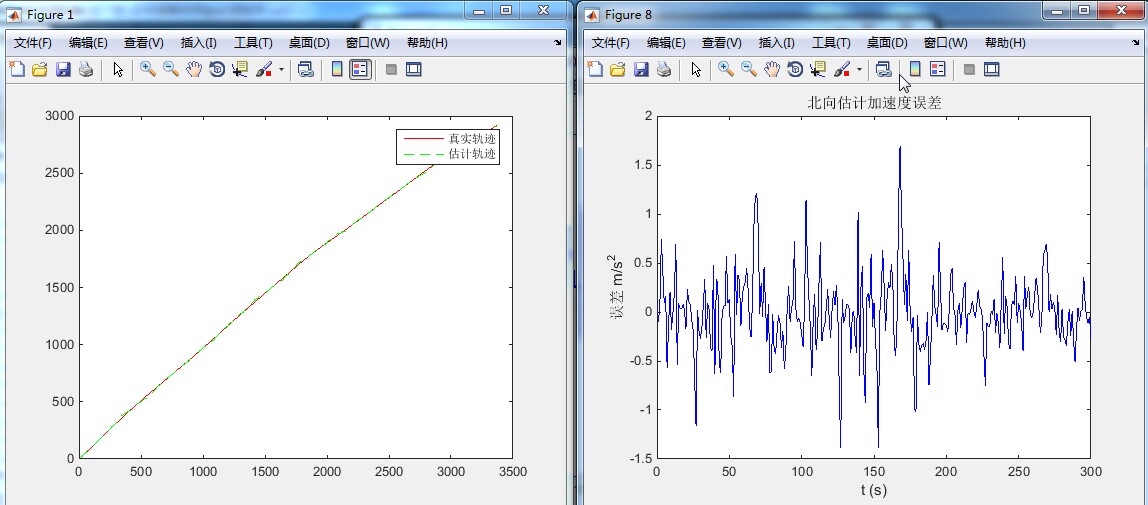
多传感器信息融合在现代技术领域中扮演着至关重要的角色,它可以提供准确、可靠的数据用于轨迹跟踪与估计。在实际应用中,我们经常会遇到这样的问题:如何利用来自多个传感器的数据来准确估计目标的轨迹?为了解决这个问题,人们提出了多种算法,其中包括卡尔曼滤波算法、自适应扩展卡尔曼滤波算法(AEKF)以及无迹卡尔曼滤波算法(UKF)。本文将以这三种不同的算法实现轨迹跟踪为主题展开讨论。
首先,我们来介绍卡尔曼滤波算法。卡尔曼滤波算法是一种经典的、线性的、最优的估计方法。它基于贝叶斯滤波理论,通过迭代的方式利用过去时刻的状态估计和当前时刻的测量值来得到新的状态估计。卡尔曼滤波算法的核心思想是通过对状态的线性组合来减小估计误差,并且能适应系统的状态变化。然而,卡尔曼滤波算法对线性关系的假设以及高斯噪声的假设限制了其在非线性和非高斯情况下的应用。
为了解决卡尔曼滤波算法在非线性和非高斯情况下的问题,研究者们提出了自适应扩展卡尔曼滤波算法(AEKF)。AEKF是对传统卡尔曼滤波算法的一种改进,它通过自适应地调整状态的协方差矩阵和观测噪声的协方差矩阵来适应非线性和非高斯情况。具体来说,AEKF通过引入扩展状态向量和扩展协方差矩阵来描述非线性关系,通过扩展卡尔曼滤波来估计非高斯的状态分布。这种方法能够更好地适应系统的非线性和非高斯特性,提高了估计的准确性。
除了AEKF,另一种常用的非线性滤波算法是无迹卡尔曼滤波算法(UKF)。UKF通过选择一组特定的采样点来近似非线性变换的影响,从而避免了卡尔曼滤波算法中的线性化误差。具体来说,UKF通过在卡尔曼滤波算法中引入一组无迹变换的采样点来近似非线性变换的效果,从而得到更准确的状态估计。相比于AEKF,UKF无需对系统进行线性化,因此其实现相对简单,并且能够更好地适应高度非线性的系统。
总结起来,多传感器信息融合是实现轨迹跟踪与估计的关键。卡尔曼滤波算法、AEKF和UKF是三种常用的算法,在不同的应用场景中都有广泛的应用。其中,卡尔曼滤波算法是一种经典的、线性的、最优的估计方法,但对线性关系和高斯噪声有一定的假设限制;AEKF通过自适应调整状态的协方差矩阵和观测噪声的协方差矩阵来适应非线性和非高斯情况,提高了估计的准确性;UKF通过选择一组特定的采样点来近似非线性变换的影响,避免了线性化误差,能够更好地适应高度非线性的系统。
在具体应用时,我们需要根据系统的特点选择适合的算法,并结合实际情况进行参数调整。除了算法选择外,还需要注意传感器的选择、数据预处理等问题。多传感器信息融合的研究还有许多潜在的问题和挑战,需要进一步探索和研究。
综上所述,多传感器信息融合在轨迹跟踪与估计中起着重要的作用。卡尔曼滤波算法、自适应扩展卡尔曼滤波算法和无迹卡尔曼滤波算法是常用的算法,在不同的应用场景中有各自的优劣势。未来的研究方向包括算法的进一步改进和优化,以及传感器融合的更深入研究,以满足更高的准确性和实时性要求。
相关的代码,程序地址如下:http://imgcs.cn/614439220968.html


















 1614
1614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









