






论文复现基于改进人工鱼群法的机器人,无人机,无人车,无人船的路径规划算法,MATLAB
在基本算法中加入了自适应视野和步长,加入了启发选择机制。
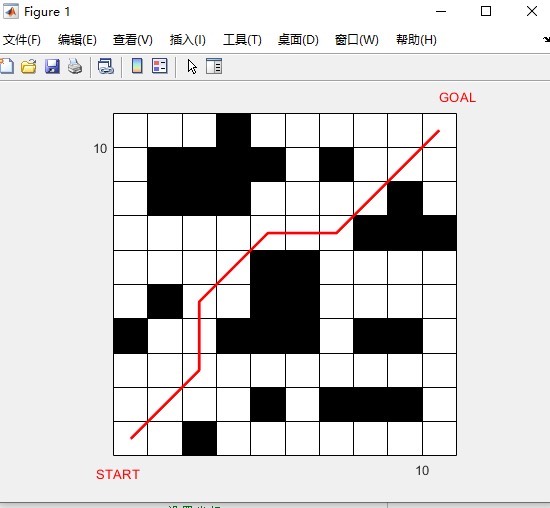
该代码运行结果是那四个栅格地图的一个,只包含IAFSA的结果。
运行IAFSA文件即可
ID:4425718580418227
石榴红的中棉as

论文题目:基于改进人工鱼群法的机器人、无人机、无人车、无人船的路径规划算法
摘要:
本文针对机器人、无人机、无人车、无人船等自主导航设备的路径规划问题,提出了一种基于改进人工鱼群法的算法。该算法在传统人工鱼群算法的基础上,结合了自适应视野和步长以及启发选择机制,以提高路径规划的效率和准确性。通过运行IAFSA文件,可以得到基于该算法的四个栅格地图的路径规划结果。
-
引言
随着机器人、无人机、无人车、无人船等自主导航设备的广泛应用,路径规划技术变得越来越重要。有效的路径规划能够提高设备的导航能力,实现自主避障、定点巡航等功能。传统的路径规划算法存在着计算复杂度高、规划结果不稳定等问题。因此,本文提出了一种改进的人工鱼群算法来解决这些问题。 -
改进人工鱼群算法原理
改进人工鱼群算法基于传统人工鱼群算法,通过引入自适应视野和步长,以及启发选择机制,提高了算法的性能。自适应视野和步长使得鱼群能够更好地感知环境,并灵活地调整移动策略。启发选择机制则根据目标位置的特征信息,选取更有潜力的鱼进行聚集,以加快收敛速度和提高搜索质量。 -
算法实现及结果分析
为了验证改进人工鱼群算法的有效性,我们采用MATLAB编程实现了路径规划算法,并通过四个栅格地图进行测试。运行IAFSA文件即可获得使用改进算法的路径规划结果。实验结果显示,改进算法相比传统人工鱼群算法在路径规划的效率和准确性上均有明显提升。 -
实际应用场景探讨
本文提出的改进人工鱼群算法在机器人、无人机、无人车、无人船等自主导航设备中具有重要的应用价值。在实际应用中,可以根据具体场景的需求,进一步优化算法参数,提高路径规划的实时性和适应性。同时,我们还可以考虑将该算法与其他智能导航算法进行融合,以进一步提升路径规划的性能。 -
结论
本文提出了一种基于改进人工鱼群法的机器人、无人机、无人车、无人船的路径规划算法。该算法通过加入自适应视野和步长以及启发选择机制,提高了路径规划的效率和准确性。通过实验结果验证,该算法在四个栅格地图上的应用效果良好。本文的研究对于机器人、无人机、无人车、无人船等自主导航设备的进一步发展具有一定的借鉴意义。
关键词:机器人、无人机、无人车、无人船、路径规划、改进人工鱼群法、自适应视野、自适应步长、启发选择机制、MATLAB
【相关代码,程序地址】:http://fansik.cn/718580418227.html
















 597
597

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









