






 本文介绍了一种利用VREP和MATLAB进行机械臂视觉抓取仿真的方法,通过GUI控制机械臂,结合图像处理与机器学习算法实现物体识别和抓取,适用于学习和机器人开发初学者。
本文介绍了一种利用VREP和MATLAB进行机械臂视觉抓取仿真的方法,通过GUI控制机械臂,结合图像处理与机器学习算法实现物体识别和抓取,适用于学习和机器人开发初学者。
机械臂视觉抓取仿真,vrep与matlab联合仿真示例,仅供学习
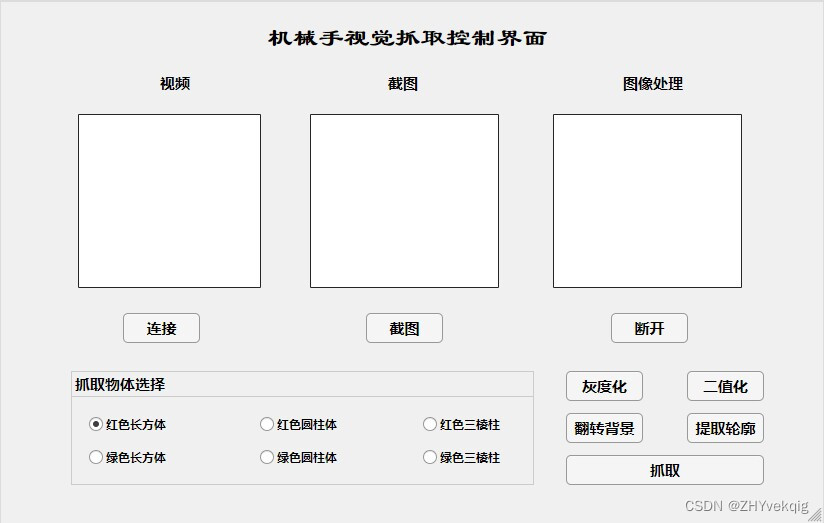
matlab端通过GUI控制机械臂抓不同的物体,在matlab端有简单的图像处理算法,未优化,可以自己改进。
基础太差的勿用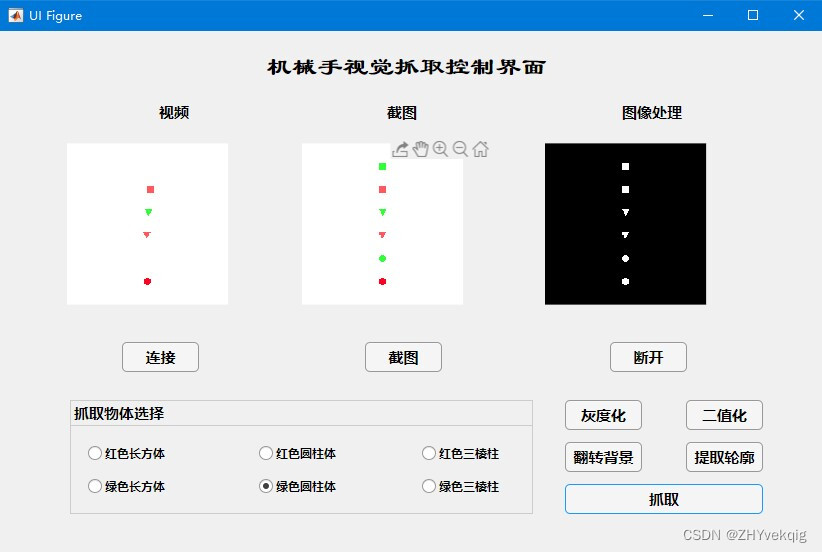
机械臂视觉抓取仿真,vrep与matlab联合仿真示例,仅供学习
机械臂视觉抓取一直是机器人领域中的一个重要问题,因为它涉及到机器人在工业生产中的应用,而机器人往往需要通过视觉来感知周围环境,从而完成各种各样的任务。而在这个过程中,机械臂的动作控制和视觉处理是必不可少的。因此,机械臂视觉抓取仿真的研究也就显得尤为重要。
在这篇文章中,我们将介绍一种机械臂视觉抓取仿真的方法,利用vrep与matlab联合仿真进行模拟实现。主要包括在matlab端通过GUI控制机械臂抓不同的物体,并且使用简单的图像处理算法进行视觉处理,最后完成机械臂的动作控制和物品的抓取。本示例仅供学习使用,需要有一定的matlab和vrep使用基础。
首先,让我们来介绍一下vrep(Virtual Robot Experimentation Platform)。vrep是一个用于机器人仿真的开源软件,它提供了一种便捷的方式来建立机器人模型,并且能够模拟复杂的机器人控制算法。vrep还支持多种编程语言,包括C/C++、Python和Matlab,这也使得它成为了机器人仿真的常用工具之一。
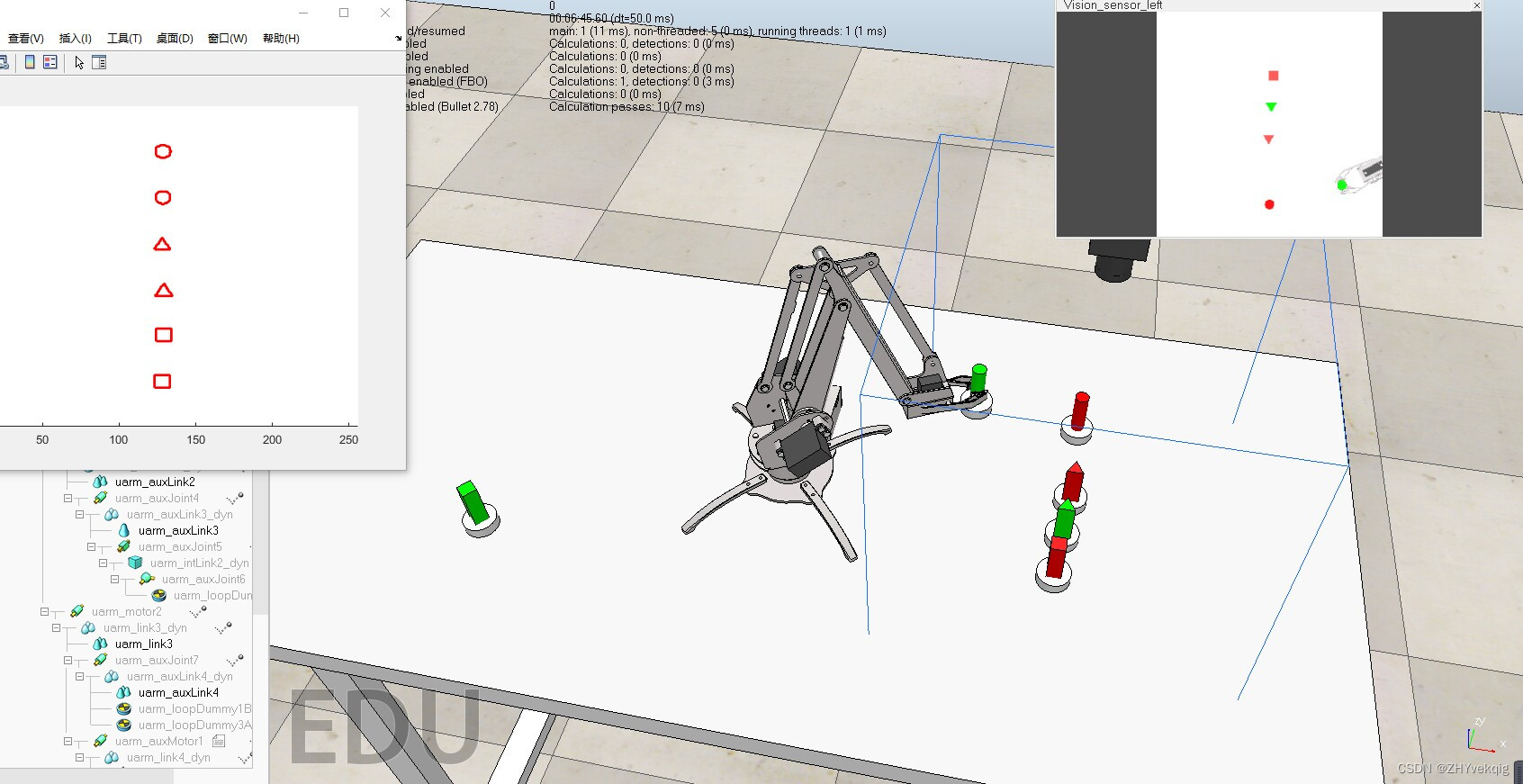
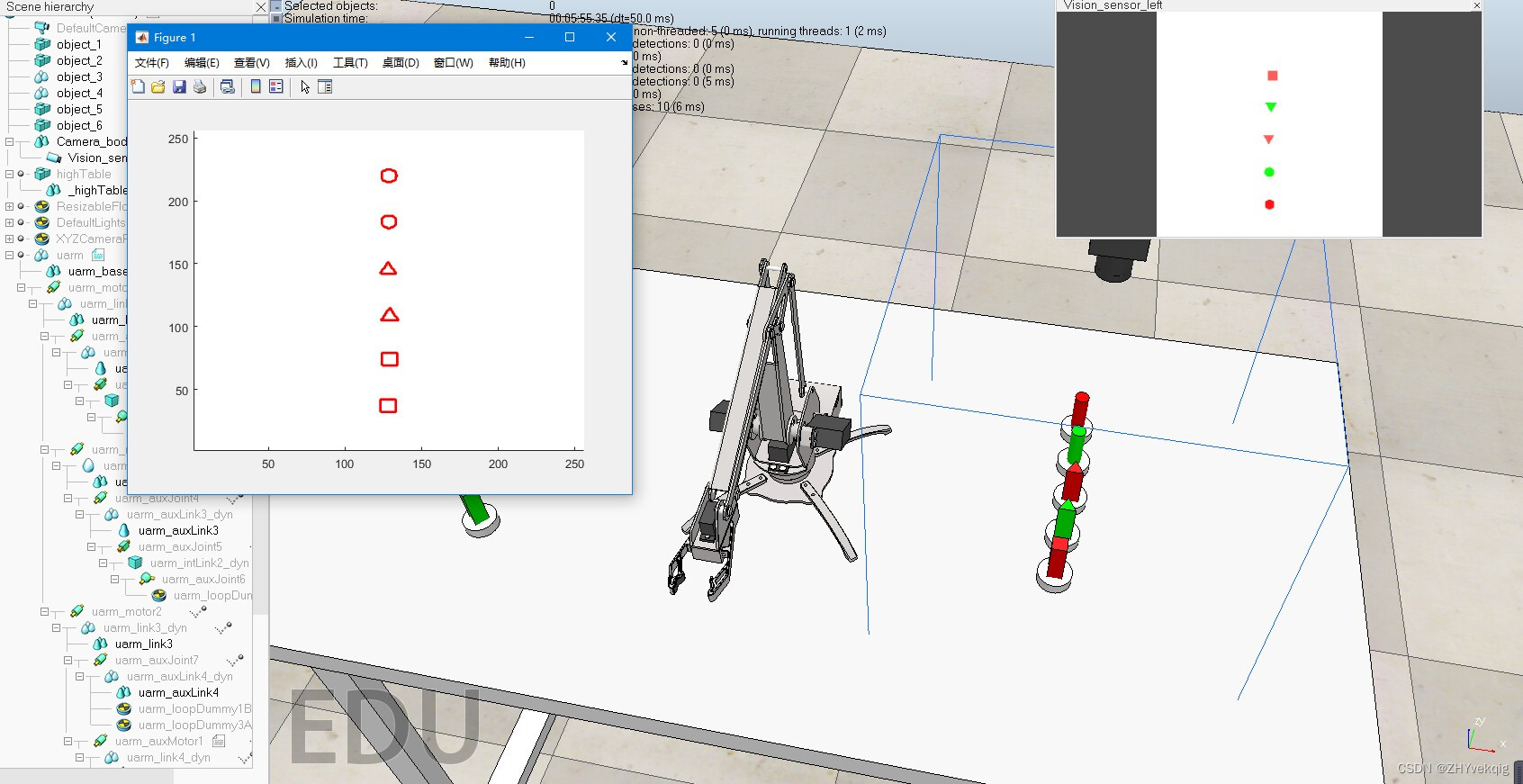
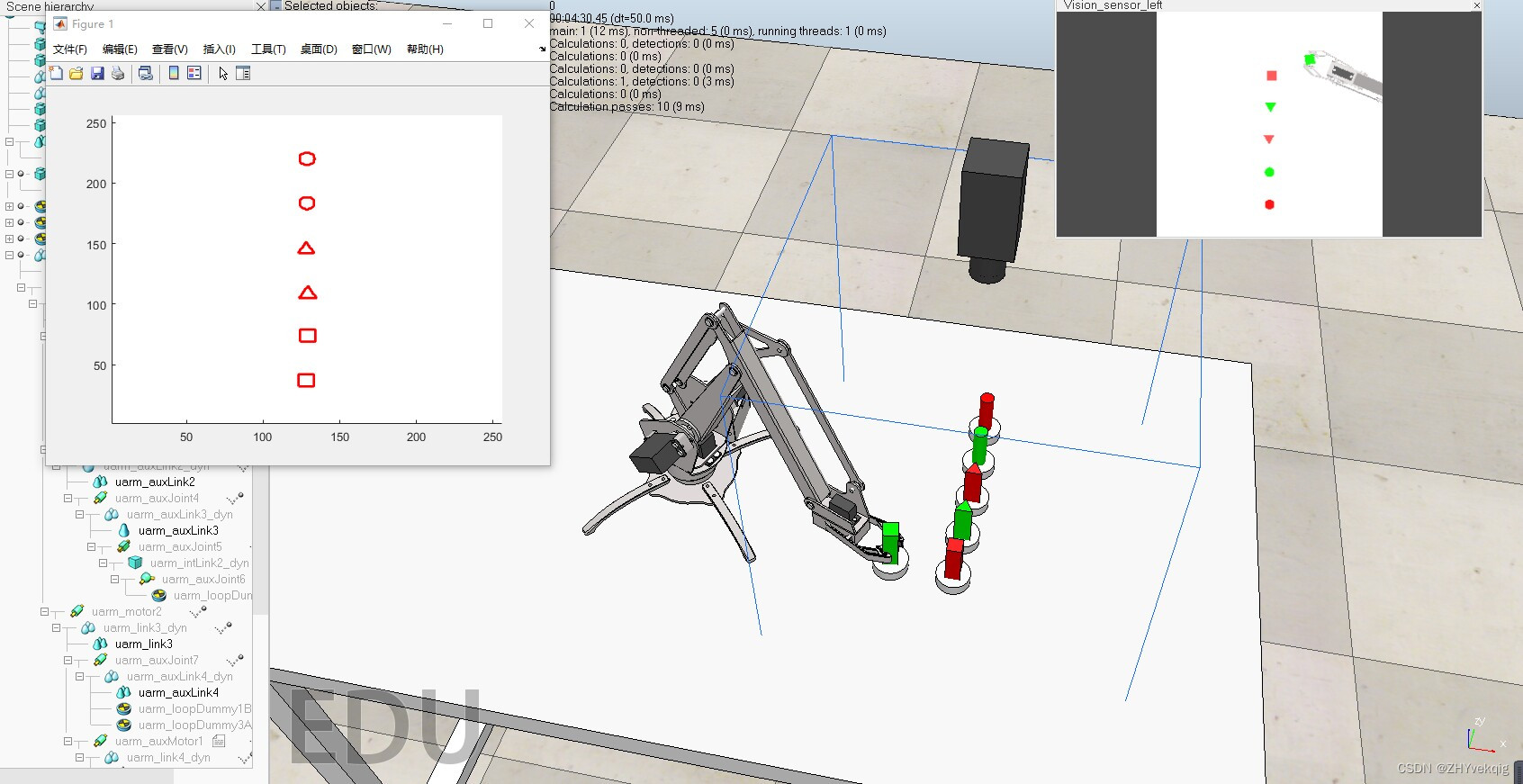
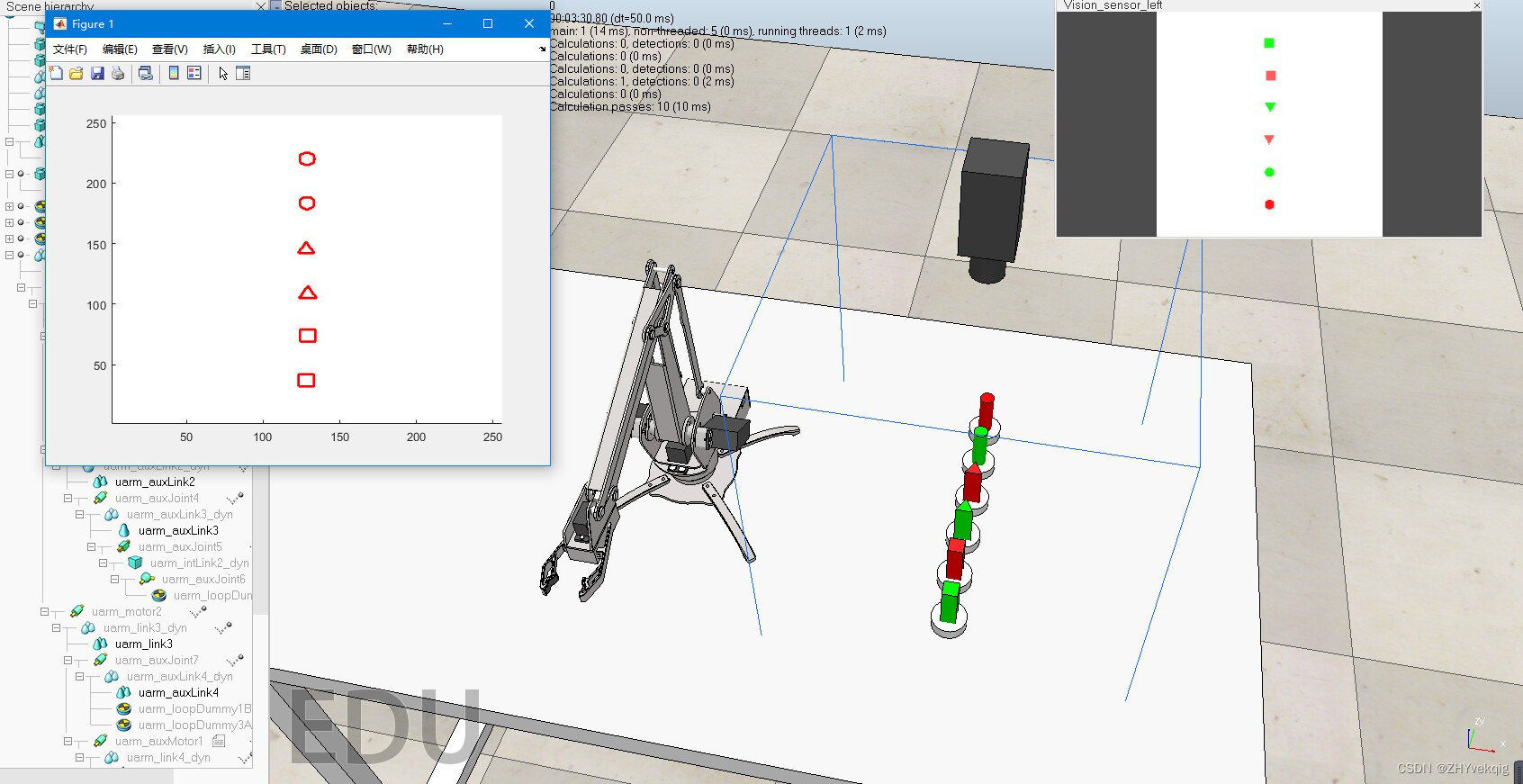
在本文中,我们将使用vrep建立一个机械臂的模型,并且进行仿真实验。然后,我们将在matlab端编写一个GUI程序,通过该程序来控制机械臂的运动。具体而言,我们将使用matlab的图像处理工具箱,对机械臂周围的物体进行识别和定位。在这个过程中,我们还将使用matlab的机器学习算法来训练一个物体分类器,从而实现对物体的识别。
接下来,我们将详细介绍如何使用vrep来建立机械臂模型,并将其与matlab进行联合仿真。首先,我们需要在vrep中创建一个机械臂模型。在这个模型中,我们需要定义机械臂的关节、末端执行器以及传感器等组件。在模型创建的过程中,我们需要注意机械臂各个组件之间的协调性,以保证机械臂的运动连贯性和稳定性。
之后,我们需要在vrep中定义机械臂的动作控制算法。具体而言,我们需要将matlab端发送的控制指令与机械臂模型中的状态量进行配合,从而实现机械臂的动态控制。在这个过程中,我们可以使用vrep提供的Lua脚本语言,来编写机械臂的动作控制算法。
在建立好机械臂模型和控制算法之后,我们就可以在matlab端编写GUI程序来控制机械臂的动作了。具体而言,我们可以使用matlab的图像处理工具箱,来对机械臂周围的物体进行识别和定位。在这个过程中,我们需要使用一些基础的图像处理算法,如边缘检测、二值化、形态学操作等。此外,我们还需要使用matlab的机器学习算法,来训练一个物体分类器,用于对不同的物体进行识别。
最后,我们需要将matlab端的GUI程序与vrep进行连接,并实现机械臂的动态控制。在这个过程中,我们可以使用matlab提供的TCP/IP通信工具箱,来实现与vrep之间的数据传输。具体而言,我们需要将matlab端发送的控制指令通过TCP/IP协议发送到vrep中,然后由vrep进行解析和执行。
总之,机械臂视觉抓取仿真是机器人领域中的一个重要问题,它涉及到机器人的动作控制和视觉处理等多个方面。利用vrep与matlab联合仿真进行模拟实现,可以有效地解决这个问题。在本文中,我们介绍了一种基于vrep和matlab的机械臂视觉抓取仿真方法,并详细地介绍了该方法的具体实现过程。希望本文能够对机器人爱好者和从业人员有所启发和帮助。
相关代码,程序地址:http://lanzouw.top/628409277368.html

















 634
634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









