






探索 ANSYS Motion 在模拟机械臂装配动力学和优化其性能方面的强大功能。
了解 ANSYS Motion 及其功能
ANSYS Motion 是一款强大的仿真软件,可帮助工程师分析和预测机械系统(包括机器人手臂)的行为。通过利用 ANSYS Motion,工程师可以模拟机器人手臂的运动和动态,全面了解手臂在不同条件下的运动和响应方式。
ANSYS Motion 的一个主要优势在于它能够精确建模和仿真机器人手臂各个部件(如关节、连杆和执行器)之间的复杂相互作用。此功能使工程师能够评估手臂的性能并确定任何潜在的改进领域或问题。
此外,ANSYS Motion 还提供各种分析工具和功能,使工程师能够研究不同因素对机械臂性能的影响。其中包括检查各种控制策略的效果、优化机械臂的轨迹以及评估其稳定性和安全性。
我们的机械臂经过精心设计,可使用连接到轨道上的块的线性致动器轻松操纵物体。这种创新设计使机械臂能够通过组合块运动无缝操纵物体。在本次演示中,机械臂将通过承载 85 公斤的重物来展示其能力。
在 ANSYS Motion 中设计和构建机械臂模型
在 ANSYS Motion 中创建机器人手臂模型需要循序渐进的过程。首先,工程师必须收集有关手臂的基本信息,例如其尺寸、材料和机械部件。这些数据是使用 ANSYS 3D 设计工具开发精确 3D 模型的基础。
创建 3D 模型后,工程师可以指定手臂的运动结构,确定关节和连接的数量和类型,以及每个关节的运动范围。这使 ANSYS Motion 能够精确模拟手臂的运动和动态。
为了模拟 Tripteron,我们使用一个固定关节将导轨牢固地固定到位。此外,还有三个平移关节使机械臂能够移动,以及六个旋转关节,它们在机械臂和整个系统之间建立连接,模拟轴承。请参阅图 1 以直观的方式展示此设置。
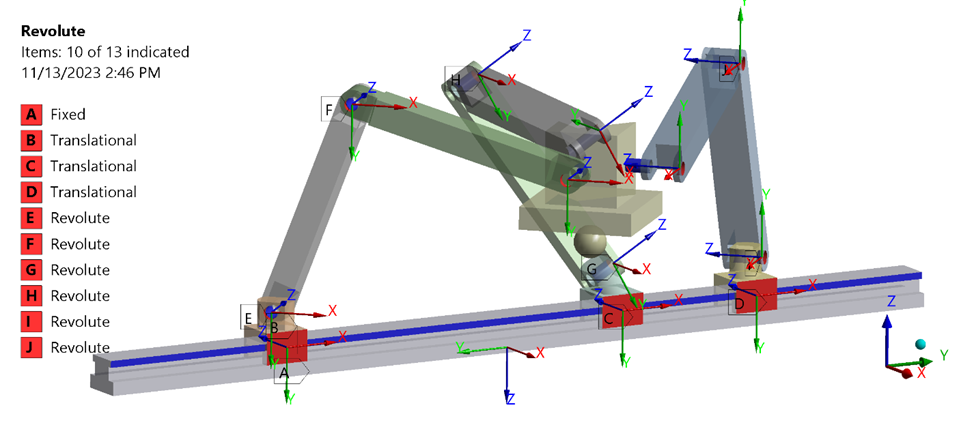
图 1:机器人系统的关节定义
接下来,工程师需要定义手臂的执行器(例如电机或液压系统)及其相应的控制策略。这使得 ANSYS Motion 能够模拟手臂的驱动和对控制输入的响应。
如图 2 所示,我们有定义每个块的移动的函数表达式,以便我们可以控制笛卡尔空间中的对象。
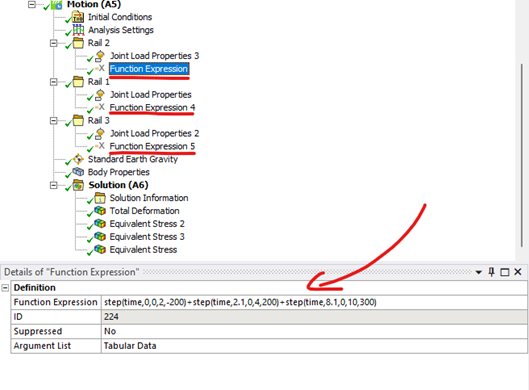
图 2:函数表达式定义
此外,该模型还包括一个主体属性对象,如图 3 所示。与常规求解器相比,ANSYS Motion 提供的此功能可实现更快的模拟。通过将主体的定义从节点主体更改为模态主体,求解器可以对其范围内的特定主体执行模态分析。这种高效的多体动力学分析利用刚度信息来准确计算主体上的应力和应变。
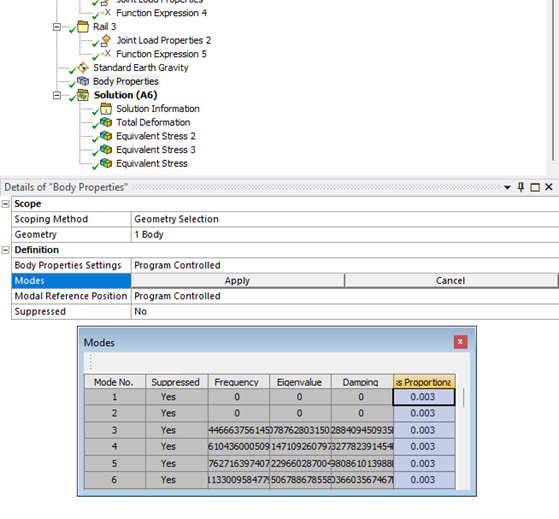
图 3:Body 属性对象定义
一旦定义了手臂的运动结构和执行器,工程师就可以在 ANSYS Motion 中进行仿真,以彻底分析手臂的性能。该分析包括评估手臂在各种操作场景中的运动、力、扭矩和其他动态参数。
可以分析并绘制三个执行器操纵物体所需施加的力,以选择执行器,如图 4 所示。此外,可以在不同的操作条件下创建和绘制各种运动、力、扭矩和其他动态参数,以增强系统的有效性。
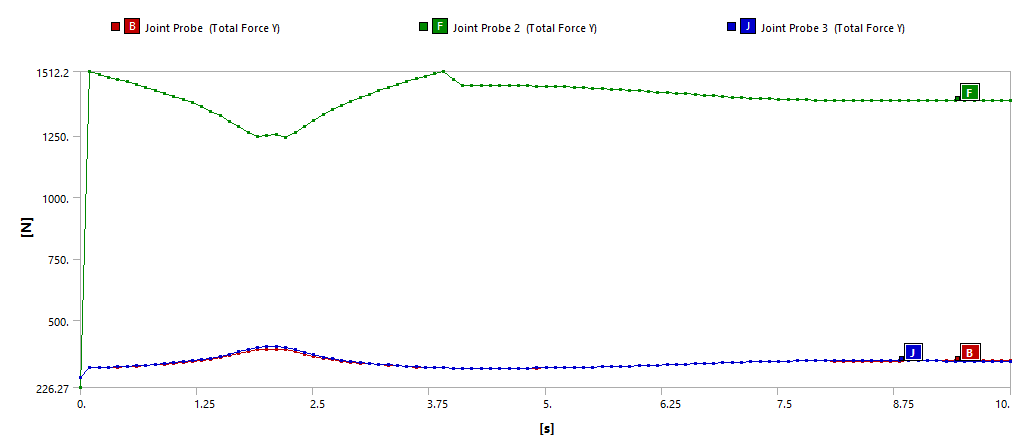
图 4:平移关节产生的力反作用
根据仿真结果,工程师可以对设计进行修改或优化,以提高机械臂的性能。这种迭代的仿真和设计改进过程可帮助工程师创建符合所需性能标准的机械臂模型。


















 1059
1059

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











