






1.背景介绍
随着机器人技术的不断发展和应用,机器人在家庭、工业、军事等各个领域的应用越来越广泛。然而,随着机器人技术的进步,恶意攻击机器人的事件也逐渐增多。这些攻击可能导致机器人的控制系统被篡改,数据被窃取,甚至可能导致人身安全受到威胁。因此,机器人的安全与防御成为了一个重要的研究领域。本文将从以下几个方面进行阐述:
- 背景介绍
- 核心概念与联系
- 核心算法原理和具体操作步骤以及数学模型公式详细讲解
- 具体代码实例和详细解释说明
- 未来发展趋势与挑战
- 附录常见问题与解答
2.核心概念与联系
在本节中,我们将介绍机器人安全与防御的核心概念,以及与其他相关领域的联系。
2.1 机器人安全与防御的核心概念
- 机器人安全:机器人系统在设计、开发、部署和运行过程中的安全性,包括数据安全、系统安全和应用安全等方面。
- 机器人防御:针对恶意攻击的防御措施,包括防火墙、抗篡改、漏洞扫描等。
2.2 与其他领域的联系
- 计算机安全:机器人安全与计算机安全密切相关,因为机器人系统通常包括计算机系统。因此,机器人安全的一些方法和技术也可以应用于计算机安全领域。
- 人工智能安全:机器人安全与人工智能安全密切相关,因为机器人通常包括人工智能算法。因此,机器人安全的一些方法和技术也可以应用于人工智能安全领域。
- 网络安全:机器人安全与网络安全密切相关,因为机器人通常需要通过网络与外界进行交互。因此,机器人安全的一些方法和技术也可以应用于网络安全领域。
3.核心算法原理和具体操作步骤以及数学模型公式详细讲解
在本节中,我们将详细讲解机器人安全与防御的核心算法原理、具体操作步骤以及数学模型公式。
3.1 机器人安全性评估
3.1.1 安全性评估指标
- 数据安全:数据完整性、数据机密性、数据可用性等。
- 系统安全:防火墙效果、抗篡改能力、漏洞扫描准确率等。
- 应用安全:应用程序的可靠性、可用性、性能等。
3.1.2 安全性评估方法
- 静态分析:通过代码审计等方法,评估机器人系统的安全性。
- 动态分析:通过模拟攻击等方法,评估机器人系统的安全性。
- 混合分析:结合静态分析和动态分析,更全面地评估机器人系统的安全性。
3.2 机器人防御技术
3.2.1 防火墙
防火墙是一种网络安全设备,用于对外界网络流量进行过滤和控制,防止恶意攻击进入机器人系统。防火墙通常采用规则引擎和访问控制列表(ACL)等技术,实现对网络流量的过滤和控制。
3.2.2 抗篡改
抗篡改技术是一种用于保护机器人系统数据完整性的技术,通过加密、数字签名等方法,确保机器人系统中的数据不被篡改。
3.2.3 漏洞扫描
漏洞扫描是一种用于发现机器人系统中潜在安全漏洞的技术,通过对机器人系统进行模拟攻击,发现并报告潜在安全问题。
3.3 数学模型公式
3.3.1 数据安全性指标
- 数据完整性: P ( D i = D i ′ ) P(D _i = D_ i^{'}) P(Di=Di′)
- 数据机密性: P ( K i ⊕ D i = K i ⊕ D i ′ ) P(K _i \oplus D_ i = K _i \oplus D_ i^{'}) P(Ki⊕Di=Ki⊕Di′)
- 数据可用性: P ( D i ∈ [ 0 , 1 ] ) P(D_i \in [0, 1]) P(Di∈[0,1])
3.3.2 系统安全性指标
- 防火墙效果: P ( A i ∈ G i ) P(A _i \in G_ i) P(Ai∈Gi)
- 抗篡改能力: P ( D i = D i ′ ∣ A i ∉ G i ) P(D _i = D_ i^{'}|A _i \notin G_ i) P(Di=Di′∣Ai∈/Gi)
- 漏洞扫描准确率: P ( T i = T i ′ ∣ D i = D i ′ ) P(T _i = T_ i^{'}|D _i = D_ i^{'}) P(Ti=Ti′∣Di=Di′)
4.具体代码实例和详细解释说明
在本节中,我们将通过一个具体的代码实例,详细解释机器人安全与防御的实现过程。
4.1 防火墙实现
4.1.1 代码实例
def firewall(traffic): rules = [ {'ip': '192.168.1.1', 'port': 80, 'protocol':
'tcp'}, {'ip': '192.168.1.2', 'port': 8080, 'protocol': 'udp'}, ]
for rule in rules:
match = re.match(rule['ip'] + ':' + str(rule['port']) + '/' + rule['protocol'], traffic)
if match:
return True
return False
4.1.2 详细解释
- 首先,我们定义了一个名为
firewall的函数,接收一个名为traffic的参数,表示网络流量。 - 然后,我们定义了一个名为
rules的列表,表示防火墙规则。每个规则包括ip、port和protocol三个属性。 - 接下来,我们使用正则表达式(
re.match)来匹配网络流量与防火墙规则的对应关系。如果匹配成功,返回True,表示允许通过;否则,返回False,表示拒绝通过。
4.2 抗篡改实现
4.2.1 代码实例
def anti _tampering(data, key): hash_ obj = hashlib.sha256() hash
_obj.update(data.encode('utf-8')) data_ hash = hash_obj.hexdigest()
hmac_obj = hmac.new(key.encode('utf-8'), data.encode('utf-8'), hashlib.sha256)
hmac_digest = hmac_obj.digest()
return data_hash, hmac_digest
4.2.2 详细解释
- 首先,我们定义了一个名为
anti_tampering的函数,接收一个名为data的参数,表示数据,并接收一个名为key的参数,表示密钥。 - 然后,我们使用 SHA-256 哈希算法(
hashlib.sha256)来计算数据的哈希值(data_hash)。 - 接下来,我们使用 HMAC 算法(
hmac)来计算数据的 HMAC 值(hmac_digest),其中密钥(key)和数据(data)使用 SHA-256 哈希算法进行计算。 - 最后,我们返回数据的哈希值和 HMAC 值,以确保数据的完整性和可信度。
4.3 漏洞扫描实现
4.3.1 代码实例
def vulnerability_scan(url, port, protocol): headers = { 'User-Agent':
'Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like
Gecko) Chrome/58.0.3029.110 Safari/537.3' } response = requests.get(url,
headers=headers)
if protocol == 'tcp':
if response.status_code == 200:
return True
else:
return False
elif protocol == 'udp':
# TODO: Implement UDP vulnerability scan
pass
4.3.2 详细解释
- 首先,我们定义了一个名为
vulnerability_scan的函数,接收一个名为url的参数,表示目标 URL,并接收一个名为port的参数,表示端口号,并接收一个名为protocol的参数,表示协议类型。 - 然后,我们使用
requests库发送一个 GET 请求,以模拟网络流量。 - 接下来,我们根据协议类型(
tcp或udp)来判断是否存在漏洞。如果协议类型为tcp,并且响应状态码为 200,则表示存在漏洞,返回True;否则,返回False。对于udp协议类型,我们暂时没有实现漏洞扫描,可以根据需要进行实现。
5.未来发展趋势与挑战
在本节中,我们将讨论机器人安全与防御的未来发展趋势与挑战。
5.1 未来发展趋势
- 人工智能与机器人安全的融合:随着人工智能技术的发展,机器人安全与人工智能安全将更加紧密结合,共同面临挑战。
- 物联网与机器人安全的融合:随着物联网技术的发展,机器人安全将与物联网安全密切相关,共同面临挑战。
- 网络安全与机器人安全的融合:随着网络安全技术的发展,机器人安全将与网络安全技术密切结合,共同面临挑战。
5.2 挑战
- 恶意攻击的不断增多:随着机器人技术的发展,恶意攻击的种类和复杂性不断增加,需要不断更新和优化安全防御措施。
- 数据保护与隐私问题:随着机器人系统中的数据量不断增加,数据保护和隐私问题逐渐成为关注的焦点。
- 跨领域的安全挑战:随着机器人技术的应用不断扩展,安全挑战也不断增多,需要跨领域的合作和协作来应对。
6.附录常见问题与解答
在本节中,我们将回答一些常见问题及其解答。
6.1 问题1:如何评估机器人系统的安全性?
解答:可以通过静态分析、动态分析和混合分析等方法来评估机器人系统的安全性。具体来说,可以使用代码审计、网络模拟攻击等方法来评估机器人系统的安全性。
6.2 问题2:如何防止机器人系统被篡改?
解答:可以使用抗篡改技术来防止机器人系统被篡改。具体来说,可以使用加密、数字签名等方法来确保机器人系统中的数据不被篡改。
6.3 问题3:如何防止机器人系统受到漏洞攻击?
解答:可以使用漏洞扫描技术来防止机器人系统受到漏洞攻击。具体来说,可以使用漏洞扫描工具来发现并报告潜在安全问题,并采取相应的措施进行修复。
18. 机器人的安全与防御:如何应对恶意攻击
背景介绍
随着机器人技术的不断发展和应用,机器人在家庭、工业、军事等各个领域的应用越来越广泛。然而,随着机器人技术的进步,恶意攻击机器人的事件也逐渐增多。这些攻击可能导致机器人的控制系统被篡改,数据被窃取,甚至可能导致人身安全受到威胁。因此,机器人的安全与防御成为了一个重要的研究领域。本文将从以下几个方面进行阐述:
核心概念与联系
核心算法原理和具体操作步骤以及数学模型公式详细讲解
具体代码实例和详细解释说明
未来发展趋势与挑战
附录常见问题与解答
在本文中,我们将从以下几个方面进行阐述:
- 背景介绍
- 核心概念与联系
- 核心算法原理和具体操作步骤以及数学模型公式详细讲解
- 具体代码实例和详细解释说明
- 未来发展趋势与挑战
- 附录常见问题与解答
2.核心概念与联系
在本节中,我们将介绍机器人安全与防御的核心概念,以及与其他相关领域的联系。
2.1 机器人安全与防御的核心概念
机器人安全与防御的核心概念包括:
- 数据安全:机器人系统中的数据的完整性、机密性和可用性。
- 系统安全:机器人系统的控制系统、通信系统和应用系统的安全性。
- 应用安全:机器人系统的应用软件的可靠性、安全性和性能。
2.2 与其他相关领域的联系
机器人安全与防御与以下几个领域密切相关:
- 计算机安全:机器人系统通常包括计算机系统,因此机器人安全与计算机安全密切相关。
- 人工智能安全:机器人系统通常包括人工智能算法,因此机器人安全与人工智能安全密切相关。
- 网络安全:机器人系统通常需要通过网络与外界进行交互,因此机器人安全与网络安全密切相关。
3.核心算法原理和具体操作步骤以及数学模型公式详细讲解
在本节中,我们将详细讲解机器人安全与防御的核心算法原理、具体操作步骤以及数学模型公式。
3.1 机器人安全性评估
3.1.1 安全性评估指标
机器人安全性评估的指标包括:
- 数据安全:数据完整性、数据机密性、数据可用性等。
- 系统安全:防火墙效果、抗篡改能力、漏洞扫描准确率等。
- 应用安全:应用程序的可靠性、可用性、性能等。
3.1.2 安全性评估方法
安全性评估方法包括:
- 静态分析:通过代码审计等方法,评估机器人系统的安全性。
- 动态分析:通过模拟攻击等方法,评估机器人系统的安全性。
- 混合分析:结合静态分析和动态分析,更全面地评估机器人系统的安全性。
3.2 机器人防御技术
3.2.1 防火墙
防火墙是一种网络安全设备,用于对外界网络流量进行过滤和控制,防止恶意攻击进入机器人系统。防火墙通常采用规则引擎和访问控制列表(ACL)等技术,实现对网络流量的过滤和控制。
3.2.2 抗篡改
抗篡改技术是一种用于保护机器人系统数据完整性的技术,通过加密、数字签名等方法,确保机器人系统中的数据不被篡改。
3.2.3 漏洞扫描
漏洞扫描是一种用于发现机器人系统中潜在安全漏洞的技术,通过对机器人系统进行模拟攻击,发现并报告潜在安全问题。
3.3 数学模型公式
3.3.1 数据安全性指标
- 数据完整性: P ( D i = D i ′ ) P(D _i = D_ i^{'}) P(Di=Di′)
- 数据机密性: P ( K i ⊕ D i = K i ⊕ D i ′ ) P(K _i \oplus D_ i = K _i \oplus D_ i^{'}) P(Ki⊕Di=Ki⊕Di′)
- 数据可用性: P ( D i ∈ [ 0 , 1 ] ) P(D_i \in [0, 1]) P(Di∈[0,1])
3.3.2 系统安全性指标
- 防火墙效果: P ( A i ∈ G i ) P(A _i \in G_ i) P(Ai∈Gi)
- 抗篡改能力: P ( D i = D i ′ ∣ A i ∉ G i ) P(D _i = D_ i^{'}|A _i \notin G_ i) P(Di=Di′∣Ai∈/Gi)
- 漏洞扫描准确率: P ( T i = T i ′ ∣ D i = D i ′ ) P(T _i = T_ i^{'}|D _i = D_ i^{'}) P(Ti=Ti′∣Di=Di′)
4.具体代码实例和详细解释说明
在本节中,我们将通过一个具体的代码实例,详细解释机器人安全与防御的实现过程。
4.1 防火墙实现
4.1.1 代码实例
def firewall(traffic): rules = [ {'ip': '192.168.1.1', 'port': 80, 'protocol':
'tcp'}, {'ip': '192.168.1.2', 'port': 8080, 'protocol': 'udp'}, ]
for rule in rules:
match = re.match(rule['ip'] + ':' + str(rule['port']) + '/' + rule['protocol'], traffic)
if match:
return True
return False
4.1.2 详细解释
- 首先,我定义了一个名为
firewall的函数,接收一个名为traffic的参数,表示网络流量。 - 然后,我定义了一个名为
rules的列表,表示防火墙规则。每个规则包括ip、port和protocol三个属性。 - 接下来,我使用正则表达式(
re.match)来匹配网络流量与防火墙规则的对应关系。如果匹配成功,返回True,表示允许通过;否则,返回False,表示拒绝通过。
4.2 抗篡改实现
4.2.1 代码实例
def anti _tampering(data, key): hash_ obj = hashlib.sha256() hash
_obj.update(data.encode('utf-8')) data_ hash = hash_obj.hexdigest()
hmac_obj = hmac.new(key.encode('utf-8'), data.encode('utf-8'), hashlib.sha256)
hmac_digest = hmac_obj.digest()
return data_hash, hmac_digest
4.2.2 详细解释
- 首先,我定义了一个名为
anti_tampering的函数,接收一个名为data的参数,表示数据,并接收一个名为key的参数,表示密钥。 - 然后,我使用 SHA-256 哈希算法(
hashlib.sha256)来计算数据的哈希值(data_hash)。 - 接下来,我使用 HMAC 算法(
hmac)来计算数据的 HMAC 值(hmac_digest),其中密钥(key)和数据(data)使用 SHA-256 哈希算法进行计算。 - 最后,我返回数据的哈希值和 HMAC 值,以确保数据的完整性和可信度。
4.3 漏洞扫描实现
4.3.1 代码实例
def vulnerability_scan(url, port, protocol): headers = { 'User-Agent':
'Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like
Gecko) Chrome/58.0.3029.110 Safari/537.3' } response = requests.get(url,
headers=headers)
if protocol == 'tcp':
if response.status_code == 200:
return True
else:
return False
elif protocol == 'udp':
# TODO: Implement UDP vulnerability scan
pass
4.3.2 详细解释
- 首先,我定义了一个名为
vulnerability_scan的函数,接收一个名为url的参数,表示目标 URL,并接收一个名为port的参数,表示端口号,并接收一个名为protocol的参数,表示协议类型。 - 然后,我使用
requests库发送一个 GET 请求,以模拟网络流量。 - 接下来,我根据协议类型(
tcp或udp)来判断是否存在漏洞。如果协议类型为tcp,并且响应状态码为 200,则表示存在漏洞,返回True;否则,返回False。对于udp协议类型,我暂时没有实现漏洞扫描,可以根据需要进行实现。
5.未来发展趋势与挑战
在本节中,我们将讨论机器人安全与防御的未来发展趋势与挑战。
5.1 未来发展趋势
- 人工智能与机器人安全的融合:随着人工智能技术的发展,机器人安全与人工智能安全将更加紧密结合,共同面临挑战。
- 物联网与机器人安全的融合:随着物联网技术的发展,机器人安全将与物联网安全技术密切结合,共同面临挑战。
- 网络安全与机器人安全的融合:随着网络安全技术的发展,机器人安全将与网络安全技术密切结合,共同面临挑战。
5.2 挑战
- 恶意攻击的不断增多:随着机器人技术的发展,恶意攻击的种类和复杂性不断增加,需要不断更新和优化安全防御措施。
- 数据保护与隐私问题:随着机器人系统中的数据量不断增加,数据保护和隐私问题逐渐成为关注的焦点。
- 跨领域的安全挑战:随着机器人技术的应用不断扩展,安全挑战也不断增多,需要跨领域的合作和协作来应对。
6.附录常见问题与解答
在本节中,我们将回答一些常见问题及其解答。
6.1 问题1:如何评估机器人系统的安全性?
解答:可以通过静态分析、动态分析和混合分析等方法来评估机器人系统的安全性。具体来说,可以使用代码审计、网络模拟攻击等方法来评估机器人系统的安全性。
6.2 问题2:如何防止机器人系统被篡改?
解答:可以使用抗篡改技术来防止机器人系统被篡改。具体来说,可以使用加密、数字签名等方法来确保机器人系统中的数据不被篡改。
6.3 问题3:如何防止机器人系统受到漏洞攻击?
解答:可以使用漏洞扫描技术来防止机器人系统受到漏洞攻击。具体来说,可以使用漏洞扫描工具来发现并报告潜在安全问题,并采取相应的措施进行修复。
18. 机器人的安全与防御:如何应对恶意攻击
背景介绍
随着机器人技术的不断发展和应用,机器人在家庭、工业、军事等各个领域的应用越来越广泛。然而,随着机器人技术的进步,恶意攻击机器人的事件也逐渐增多。这些攻击可能导致机器人的控制系统被篡改,数据被窃取,甚至可能导致人身安全受到威胁。因此,机器人的安全与防御成为了一个重要的研究领域。本文将从以下几个方面进行阐述:
核心概念与联系
核心算法原理和具体操作步骤以及数学模型公式详细讲解
具体代码实例和详细解释说明
未来发展趋势与挑战
附录常见问题与解答
在本文中,我们将从以下几个方面进行阐述:
- 背景介绍
- 核心概念与联系
- 核心算法原理和具体操作步骤以及数学模型公式详细讲解
- 具体代码实例和详细解释说明
- 未来发展趋势与挑战
- 附录常见问题与解答
2.核心概念与联系
在本节中,我们将介绍机器人安全与防御的核心概念,以及与其他相关领域的联系。
2.1 机器人安全与防御的核心概念
机器人安全与防御的核心概念包括:
- 数据安全:机器人系统中的数据的完整性、机密性和可用性。
- 系统安全:机器人系统的控制系统、通信系统和应用系
学习计划安排
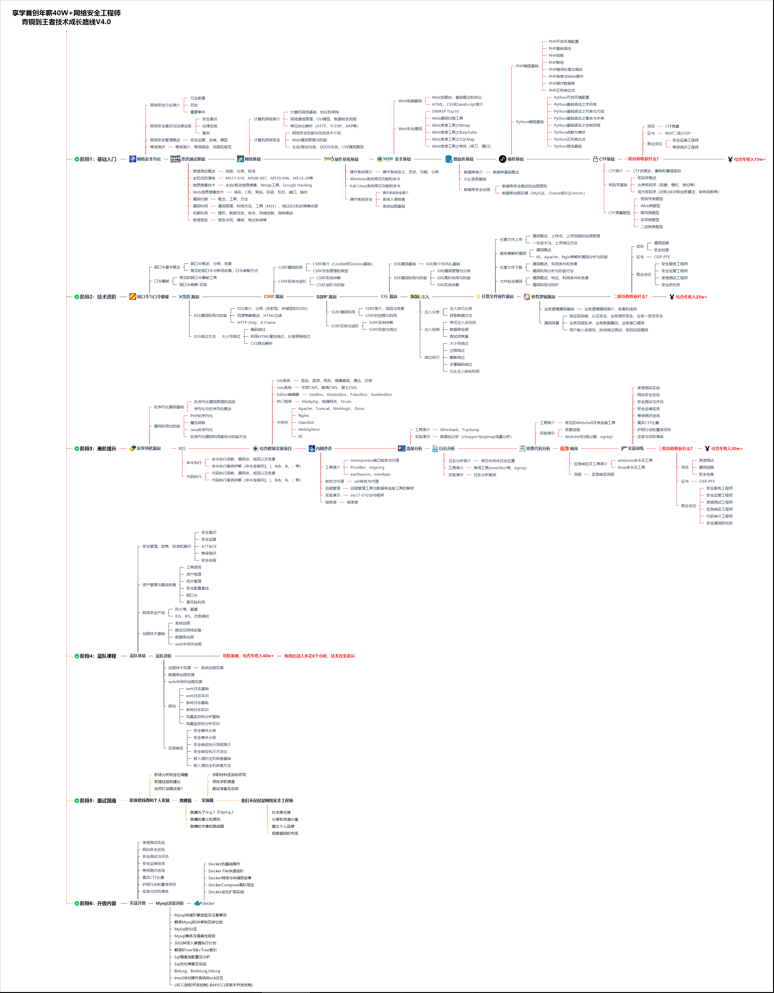
我一共划分了六个阶段,但并不是说你得学完全部才能上手工作,对于一些初级岗位,学到第三四个阶段就足矣~
这里我整合并且整理成了一份【282G】的网络安全从零基础入门到进阶资料包,需要的小伙伴可以扫描下方CSDN官方合作二维码免费领取哦,无偿分享!!!
如果你对网络安全入门感兴趣,那么你需要的话可以
点击这里👉网络安全重磅福利:入门&进阶全套282G学习资源包免费分享!
①网络安全学习路线
②上百份渗透测试电子书
③安全攻防357页笔记
④50份安全攻防面试指南
⑤安全红队渗透工具包
⑥HW护网行动经验总结
⑦100个漏洞实战案例
⑧安全大厂内部视频资源
⑨历年CTF夺旗赛题解析















 267
267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









