








《OpenCV 3计算机视觉——Python语言实现(原书第2版)》
第八章目标跟踪
|______8.4卡尔曼滤波器
本节只是对书中代码进行详细解读
卡尔曼滤波器算法分为两个阶段:
预测predict():卡尔曼滤波器使用由当前点计算的协方差来估计目标的新位置。
更新correct():卡尔曼滤波器记录目标的位置,并为下一次循环计算修正协方差。
下面是一个鼠标追踪的示例代码;
将绘制一个空帧和两条线:一条线对应于鼠标的实际运动,另一条对应于卡尔曼滤波器预测的轨迹。
import cv2
import numpy as np
#创建一个大小800*800的空帧
frame = np.zeros((800,800,3),np.uint8)
#初始化测量坐标和鼠标运动预测的数组
last_measurement = current_measurement = np.array((2,1),np.float32)
last_predicition = current_prediction = np.zeros((2,1),np.float32)
'''
mousemove()函数在这里的作用就是传递X,Y的坐标值,便于对轨迹进行卡尔曼滤波
'''
def mousemove(event,x,y,s,p):
#定义全局变量
global frame,current_measurement,measurements,last_measurement,current_prediction,last_prediction
#初始化
last_measurement = current_measurement
last_prediction = current_prediction
#传递当前测量坐标值
current_measurement = np.array([[np.float32(x)],[np.float32(y)]])
#用来修正卡尔曼滤波的预测结果
kalman.correct(current_measurement)
# 调用kalman这个类的predict方法得到状态的预测值矩阵,用来估算目标位置
current_prediction = kalman.predict()
#上一次测量值
lmx,lmy = last_measurement[0],last_measurement[1]
#当前测量值
cmx,cmy = current_measurement[0],current_measurement[1]
#上一次预测值
lpx,lpy = last_prediction[0],last_prediction[1]
#当前预测值
cpx,cpy = current_prediction[0],current_prediction[1]
#绘制测量值轨迹(绿色)
cv2.line(frame,(lmx,lmy),(cmx,cmy),(0,100,0))
#绘制预测值轨迹(红色)
cv2.line(frame,(lpx,lpy),(cpx,cpy),(0,0,200))
cv2.namedWindow("kalman_tracker")
#调用函数处理鼠标事件,具体事件必须由回调函数的第一个参数来处理,该参数确定触发事件的类型(点击和移动)
'''
void setMousecallback(const string& winname, MouseCallback onMouse, void* userdata=0)
winname:窗口的名字
onMouse:鼠标响应函数,回调函数。指定窗口里每次鼠标时间发生的时候,被调用的函数指针。
这个函数的原型应该为void on_Mouse(int event, int x, int y, int flags, void* param);
userdate:传给回调函数的参数
void on_Mouse(int event, int x, int y, int flags, void* param);
event是 CV_EVENT_*变量之一
x和y是鼠标指针在图像坐标系的坐标(不是窗口坐标系)
flags是CV_EVENT_FLAG的组合, param是用户定义的传递到setMouseCallback函数调用的参数。
常用的event:
CV_EVENT_MOUSEMOVE
CV_EVENT_LBUTTONDOWN
CV_EVENT_RBUTTONDOWN
CV_EVENT_LBUTTONUP
CV_EVENT_RBUTTONUP
和标志位flags有关的:
CV_EVENT_FLAG_LBUTTON
'''
cv2.setMouseCallback("kalman_tracker",mousemove)
'''
Kalman这个类需要初始化下面变量:
转移矩阵,测量矩阵,控制向量(没有的话,就是0),
过程噪声协方差矩阵,测量噪声协方差矩阵,
后验错误协方差矩阵,前一状态校正后的值,当前观察值。
在此cv2.KalmanFilter(4,2)表示转移矩阵维度为4,测量矩阵维度为2
卡尔曼滤波模型假设k时刻的真实状态是从(k − 1)时刻的状态演化而来,符合下式:
X(k) = F(k) * X(k-1) + B(k)*U(k) + W(k)
其中
F(k) 是作用在xk−1上的状态变换模型(/矩阵/矢量)。
B(k) 是作用在控制器向量uk上的输入-控制模型。
W(k) 是过程噪声,并假定其符合均值为零,协方差矩阵为Qk的多元正态分布。
'''
kalman = cv2.KalmanFilter(4,2)
#设置测量矩阵
kalman.measurementMatrix = np.array([[1,0,0,0],[0,1,0,0]],np.float32)
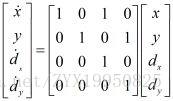
#设置转移矩阵
kalman.transitionMatrix = np.array([[1,0,1,0],[0,1,0,1],[0,0,1,0],[0,0,0,1]],np.float32)
#设置过程噪声协方差矩阵
kalman.processNoiseCov = np.array([[1,0,0,0],[0,1,0,0],[0,0,1,0],[0,0,0,1]],np.float32)*0.03
while True:
cv2.imshow("kalman_tracker",frame)
if (cv2.waitKey(30) & 0xff) == 27:
break
cv2.destroyAllWindows()
运行结果:

卡尔曼相关解读:
1.opencv中kalman点跟踪例子
2.学习OpenCV——Kalman滤波
在后面这篇博客中介绍了矩阵值设置原因:
stateNum=4;//状态数,包括(x,y,dx,dy)坐标及速度(每次移动的距离)
measureNum=2;//观测量,能看到的是坐标值,当然也可以自己计算速度















 1006
1006











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









