







 文章目录一、外极几何二、基础矩阵1.概述2.性质3.估算方法3.1八点估算法三、实验1.左右拍摄场景2.前后拍摄场景3.极点无穷远场景四、问题和总结1.问题2.总结一、外极几何如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。简单说就是用两个相机在不同位置拍摄同一物体,两张照片中的景物有重...
文章目录一、外极几何二、基础矩阵1.概述2.性质3.估算方法3.1八点估算法三、实验1.左右拍摄场景2.前后拍摄场景3.极点无穷远场景四、问题和总结1.问题2.总结一、外极几何如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。简单说就是用两个相机在不同位置拍摄同一物体,两张照片中的景物有重...
一、外极几何
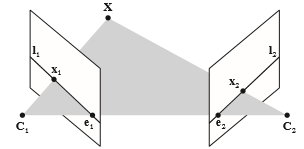
如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。简单说就是用两个相机在不同位置拍摄同一物体,两张照片中的景物有重叠部分,那么理论上这两张照片会存在一定的对应关系即外极几何。其示意图如下所示:
二、基础矩阵
1.概述
为了描述对极几何,引入基础矩阵F。对于一幅图像上的点x(图上p1),在另一幅图像上存在对极线l’,并且在第二幅图像上,与x匹配的点x’(点p2)必然在l’上。为了表示x与l’关系,我们令基础矩阵F定义为: l′=Fx。
假设第一幅图到第二幅图之间存在单应性变换H,则 x′=Hx。
又因为l’是表示过对极点e2和图像点x’的直线,可以表示为: l′=e2×x′=[e2]xx′=[e2]xHx。
所以可得 F=[e2]xH。
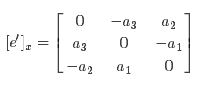
其中e′=[a1,a2,a3]Te′=[a1,a2,a3]T,则它的反对称阵定义为:
在已知两个摄像机的射影矩阵P和P’时,对于图像上的一点x,可以得到其反投影射线方程为: X(λ)=P+ x+λC
其中P+ 是P的伪逆,即PP+ = I,C为摄像机中心。射线上的两点:P+ x(当λ=0)、C(当λ=∞)在第二个摄像机P’拍摄下,在第二幅视图上的点分别为P′P+ 和P′C,这两点过对极线l’,即 l′=(P′C)×(P′P+ x)=[e′]x(P′P+ )x
可以推得 F=[e′]xP′P+。
2.性质
(1) 基础矩阵是秩为2、自由度为7的齐次矩阵。
(2)若x与x’是两幅图上的对应点,那么x′TFx=0。
(3)l’是对应于x的对极线,l′=Fx。
(4)若e是第二个摄像机光心在第一幅图像上的极点,那么Fe=0 。
3.估算方法
3.1八点估算法
基本矩阵是由该方程定义的: x′TFx=0
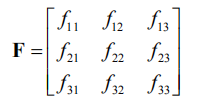
其中x↔x′是两幅图像的任意一对匹配点。由于每一组点的匹配提供了计算F系数的一个线性方程,当给定至少7个点(3×3的齐次矩阵减去一个尺度,以及一个秩为2的约束),方程就可以计算出未知的F。我们记点的坐标为x=(x,y,1)T,x′=(x′,y′,1)T
又因为F为:
所以可得到方程:
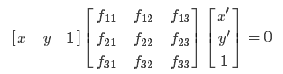
即相应方程式为

给定n组点的集合,我们有如下方程:
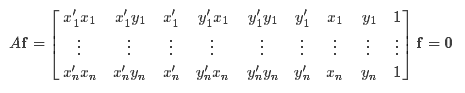
如果存在确定(非零)解,则系数矩阵A的秩最多是8。由于F是齐次矩阵,所以如果矩阵A的秩为8,则在差一个尺度因子的情况下解是唯一的。可以直接用线性算法解得。
如果由于点坐标存在噪声则矩阵AA的秩可能大于8(也就是等于9,由于A是n×9的矩阵)。这时候就需要求最小二乘解,这里就可以用SVD来求解,f的解就是系数矩阵A最小奇异值对应的奇异向量,也就是A奇异值分解后A=UDVT中矩阵V的最后一列矢量,这是在解矢量f在约束∥f∥下取∥Af∥最小的解。以上算法是解基本矩阵的基本方法,称为8点算法。
上述求解后的F不一定能满足秩为2的约束,因此还要在F的基础上加以约束。通过SVD分解可以解决,令F=UΣVT,则
因为要秩为2,所以取最后一个元素设置为0,则
最终的解
八点算法的优点:
线性求解,容易实现,运行速度快 。
八点算法的缺点:
对噪声敏感。
三、实验
代码
特征匹配:
# coding: utf-8
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
from PCV.geometry import homography, camera, sfm
from PCV.localdescriptors import sift
camera = reload(camera)
homography = reload(homography)
sfm = reload(sfm)
sift = reload(sift)
# 提取特征
im1 = array(Image.open('D:/picture/1.jpg'))
sift.process_image('D:/picture/1.jpg', 'im1.sift')
im2 = array(Image.open('D:/picture/2.jpg'))
sift.process_image('D:/picture/2.jpg', 'im2.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
l2, d2 = sift.read_features_from_file('im2.sift')
matches = sift.match_twosided(d1, d2)
ndx = matches.nonzero()[0]
x1 = homography.make_homog(l1[ndx, :2].T) # 将点集转化为齐次坐标表示
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2, :2].T) # 将点集转化为齐次坐标表示
d1n = d1[ndx]
d2n = d2[ndx2]
x1n = x1.copy()
x2n = x2.copy()
figure(figsize=(16, 16))
sift.plot_matches(im1, im2, l1, l2, matches, True) # 可视化
show()
def F_from_ransac(x1, x2, model, maxiter=5000 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 396
396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









