







写在前面:
- 本系列笔记主要以《数据结构(C语言版)》为参考(本章部分图片来源于王道),结合下方视频教程对数据结构的相关知识点进行梳理。所有代码块使用的都是C语言,如有错误欢迎指出。
- 视频链接:第01周a--前言_哔哩哔哩_bilibili
一、图的定义和基本术语
1、图的定义
(1)图(Graph)G由两个集合V和E组成,记为G=(V, E),其中V是顶点的有穷非空集合,E是V中顶点偶对的有穷集合。V(G)和E(G)通常分别表示图G的顶点集合和边集合,E(G)可以为空集,若E(G)为空,则图G只有顶点而没有边。
(2)对于图G,若边集E(G)为有向边的集合,则称该图为有向图;若边集(G)为无向边的集合,则称该图为无向图。

2、图的基本术语
(1)子图:假设有两个图G=(v, E)和G'=(v', E'),如果v'⊆v且E'⊆E,则称G'为G的子图。

(2)无向完全图和有向完全图:
①对于无向图,若具有n(n-1)/2条边(n表示图中顶点数目),则称为无向完全图。
②对于有向图,若具有n(n-1)条弧,则称为有向完全图。
(3)稀疏图和稠密图:有很少条边或弧的图称为稀疏图,反之称为稠密图。
(4)权和网:在实际应用中,每条边可以标上具有某种含义的数值,该数值称为该边上的权值,这些权值可以表示从一个顶点到另一个顶点的距离或耗费,这种带权的图通常称为网。

(5)邻接点:对于无向图G,如果图的边(v, v')∈E,则称顶点v和v'互为邻接点,即v和v'相邻接,边(v, v')依附于顶点v和v',或者说边(v, v')与顶点v和v'相关联。
(6)度、入度和出度:
①顶点v的度是指和v相关联的边的数目,记为TD(v);对于有向图,顶点v的度分为入度和出度,入度是以顶点v为头的弧的数目,记为ID(v),出度是以顶点v为尾的弧的数目,记为OD(v),顶点v的度为TD(v)= ID(v)+ OD(v)。
②一般地,如果顶点的度记为TD(
),那么一个有n个顶点、e条边的图,满足关系
。
(7)路径、路径长度和带权路径长度:
①在无向图G中,从顶点v到顶点v'的路径是一个顶点序列(),其中
;如果G是有向图,则路径也是有向的,顶点序列应满足
。
②路径长度是一条路径上经过的边或弧的数目。
③当图是带权图时,一条路径上所有边的权值之和,称为该路径的带权路径长度。
(8)回路或环:第一个顶点和最后一个顶点相同的路径称为回路或环。
(9)简单路径、简单回路或简单环:
①序列中顶点不重复出现的路径称为简单路径。
②除了第一个顶点和最后一个顶点之外,其余顶点不重复出现的回路,称为简单回路或简单环。
(10)连通、连通图和连通分量:
①在无向图G中,如果从顶点v到顶点v'有路径,则称v和v'是连通的。
②如果对于图中任意两个顶点,
和
都是连通的,则称G是连通图,连通图最少有n-1条边。
③所谓连通分量,指的是无向图中的极大连通子图,极大连通子图的意思是,该子图是图G的连通子图,且将G的任何不在该子图中的顶点加入后该子图不再连通。

(11)强连通图和强连通分量:
①在有向图G中,如果对于每一对,从
到
和从
到
都存在路径,则称G是强连通图,强连通图最少有n条边。
②有向图中的极大强连通子图称作有向图的强连通分量。

(12)连通图的生成树:一个极小连通子图(极小连通子图是图G的连通子图,在该子图中删除任何一条边,子图不再连通),它含有图中全部顶点,但只有足以构成一棵树的n-1条边,这样的连通子图称为连通图的生成树。
①简单说,生成树是所有顶点均由边连接在一起但不存在回路的图,如果在一棵生成树上添加一条边,必定构成一个环,因为这条边使得它依附的那两个顶点之间有了第二条路径。
②一个图可以有多棵不同的生成树。
(13)有向树和生成森林:
①有一个顶点的入度为0,其余顶点的入度均为1的有向图称为有向树。
②一个有向图的生成森林是由若干棵有向树组成,含有图中全部顶点,但只有足以构成若干棵不相交的有向树的弧。
③对非连通图,由各个连通分量的生成树构成的集合即为生成森林。

(14)简单图和多重图:
①简单图不存在重复边,不存在顶点到自身的边。
②图G中某两个结点之间的边数多于一条,又允许顶点通过同一条边和自己关联,则G为多重图。(下面基本都只讨论简单图)

(15)完全图:任意两个顶点都有一条边相连的图即为完全图,无向完全图共有条边,有向完全图共有
条边。
二、图的存储结构
1、邻接矩阵
(1)邻接矩阵是表示顶点之间相邻关系的矩阵。设G(V, E)是具有n个顶点的图,则G的邻接矩阵是具有如下性质的n阶方阵:

①无向图的邻接矩阵:
[1]第i个结点的度 = 第i行(或第i列)的非零元素个数。
[2]无向图的邻接矩阵是对称的,在完全图的邻接矩阵中,对角元素为0,其余均为1。
②有向图的邻接矩阵:
[1]第i个结点的出度 = 第i行的非零元素个数,第i个结点的入度 = 第i列的非零元素个数,第i个结点的度 = 第i行、第i列的非零元素个数之和。
[2]有向图的邻接矩阵中,第i行表示以结点为尾的弧(即出度边),第j列表示以结点
为头的弧(即入度边)。

(2)若G是网,则邻接矩阵可以定义为(边不存在用无穷表示,边存在则用其权值表示):


(3)用邻接矩阵表示法表示图,除了一个用于存储邻接矩阵的二维数组外,还需要用一个一维数组来存储顶点信息,其形式说明如下:
#define MaxInt 32767 //表示极大值,即无穷
#define MVNum 100 //最大顶点数
typedef char VerTexType; //假设顶点的数据类型为字符型
typedef int ArcType; //假设边的权值类型为整型
typedef struct AMGraph
{
VerTexType vexs[MVNum]; //顶点表
ArcType arcs[MVNum][MVNum]; //邻接矩阵
int vexnum, arcnum; //图的当前点数和边数
}AMGraph;
enum Status
{
OVERFLOW,
ERROR,
OK
};(4)算法具体实现:
①采用邻接矩阵表示法创建无向图:
Status CreateUDG(AMGraph *G) //创建无向图G
{
scanf("%d %d", &G->vexnum, &G->arcnum); //输入总顶点数和总边数
for (int i = 0; i < G->vexnum; i++) //依次输入点的信息
{
scanf("%c", &G->vexs[i]);
}
for (int i = 0; i < G->vexnum; i++) //初始化邻接矩阵,此时所有顶点均未连接
{
for (int j = 0; j < G->vexnum; j++)
{
G->arcs[i][j] = 0;
}
}
for (int k = 0; k < G->arcnum; k++) //构造邻接矩阵
{
VerTexType v1, v2;
scanf("%c %c", &v1, &v2); //输入一条边依附的顶点
int i, j;
for (i = 0; i < G->vexnum; i++) //确定v1和v2在G中的位置,即顶点数组的下标
{
if (v1 == G->vexs[i])
break;
}
for (j = 0; i < G->vexnum; j++)
{
if (v2 == G->vexs[j])
break;
}
G->arcs[i][j] = 1; //连接两个顶点
G->arcs[j][i] = G->arcs[i][j]; //如果建立有向图,删掉该行语句即可
}
return OK;
}②采用邻接矩阵表示法创建无向网:
Status CreateUDN(AMGraph *G) //创建无向网G
{
scanf("%d %d", &G->vexnum, &G->arcnum); //输入总顶点数和总边数
for (int i = 0; i < G->vexnum; i++) //依次输入点的信息
{
scanf("%c", &G->vexs[i]);
}
for (int i = 0; i < G->vexnum; i++) //初始化邻接矩阵,边的权值均置为无穷大
{
for (int j = 0; j < G->vexnum; j++)
{
G->arcs[i][j] = MaxInt;
}
}
for (int k = 0; k < G->arcnum; k++) //构造邻接矩阵
{
VerTexType v1, v2;
ArcType w;
scanf("%c %c %d", &v1, &v2, &w); //输入一条边依附的顶点及权值
int i, j;
for (i = 0; i < G->vexnum; i++) //确定v1和v2在G中的位置,即顶点数组的下标
{
if (v1 == G->vexs[i])
break;
}
for (j = 0; i < G->vexnum; j++)
{
if (v2 == G->vexs[j])
break;
}
G->arcs[i][j] = w;
G->arcs[j][i] = G->arcs[i][j]; //如果建立有向网,删掉该行语句即可
}
return OK;
}(5)邻接矩阵表示法的优缺点:
①优点:便于判断两个顶点之间是否有边;便于计算各个顶点的度。
②缺点:不便于增加和删除顶点;不便于统计边的数目,需要査找邻接矩阵所有元素才能统计完毕,时间复杂度为O(n2);空间复杂度高,每次创建图的结构变量时都按最大顶点数申请二维数组,对于稀疏图而言往往用不到那么多空间。
2、邻接表
(1)在邻接表中,对图中每个顶点建立个单链表,把与
相邻接的顶点放在这个链表中。
(2)邻接表中每个单链表的第一个结点存放有关顶点的信息,把这一结点看成链表的表头,其余结点存放有关边的信息,这样邻接表便由两部分组成:表头结点表和边表。
①表头结点表:由所有表头结点以顺序结构的形式存储,以便可以随机访问任一顶点的边链表;表头结点包括数据域和链域两部分,其中数据域用于存储顶点的名称或其它有关信息,链域用于指向链表中第一个结点(与顶点
邻接的第一个邻接点)。
②边表:由表示图中顶点间关系的2n个边链表组成;边链表中边结点包括邻接点域、数据域和链域3个部分,其中邻接点域指示与顶点邻接的点在图中的位置,数据域存储和边相关的信息(如权值等,如果没有要记录的信息则不需要数据域),链域指示与顶点
邻接的下一条边的结点。
③下图的示例中左图是有向图的邻接表,右图是无向图的邻接表。

(3)在无向图的邻接表中,顶点的度恰为第i个链表中的结点个数;而在有向图中,第i个链表中的结点个数只是顶点
的出度,为求入度,必须遍历整个邻接表。
(4)有时为了便于确定顶点的入度,可以建立一个有向图的逆邻接表,即对每个顶点建立一个链接所有进入
的边的表。

(5)邻接表的一些性质:
①一个图的邻接矩阵表示是唯一的,但其邻接表表示不唯一,这是因为邻接表表示中,各边表结点的链接次序取决于建立邻接表的算法以及边的输入次序。
②若无向图中有n个顶点、e条边,则其邻接表需n个头结点和2e个表结点,很明显邻接表空间效率高,适合存储稀疏图
③邻接表中每个链表对应于邻接矩阵中的一行,链表中结点个数等于一行中非零元的个数。
(6)要定义一个邻接表,需要先定义其存放顶点的头结点和表示边的边结点,邻接表存储结构说明如下:
#define MaxInt 32767 //表示极大值,即无穷
#define MVNum 100 //最大顶点数
typedef char VerTexType; //假设顶点的数据类型为字符型
typedef int ArcType; //假设边的权值类型为整型
typedef struct ArcNode //边结点
{
int adjvex; //该边所指向的顶点的位置
struct ArcNode* nextarc; //指向下一条边的指针
ArcType info; //和边相关的信息(比如权值)
}ArcNode;
typedef struct VNode //顶点信息
{
VerTexType data; //和顶点相关的信息(顶点名称)
ArcNode* firstarc; //指向第一条依附该顶点的边的指针
}VNode, AdjList[MVNum]; //AdjList表示邻接表类型
typedef struct ALGraph //邻接表
{
AdjList vertices;
int vexnum, arcnum; //图的当前顶点数和边数
}ALGraph;
enum Status
{
OVERFLOW,
ERROR,
OK
};(7)算法具体实现:
①采用邻接表表示法创建无向图:
Status CreateUDG(ALGraph *G) //创建无向图G
{
scanf("%d %d", &G->vexnum, &G->arcnum); //输入总顶点数和总边数
for (int i = 0; i < G->vexnum; i++) //输入各点,构造表头结点表
{
scanf("%c", &G->vertices[i].data); //输入顶点值(顶点名称)
G->vertices[i].firstarc = NULL; //初始化表头结点的指针域为NULL
}
for (int k = 0; k < G->arcnum; k++) //输入各边,构造边表
{
VerTexType v1, v2;
scanf("%c %c", &v1, &v2); //输入一条边依附的两个顶点
int i, j;
for (i = 0; i < G->vexnum; i++) //确定v1和v2在G中的位置,即顶点在G.vertices中的序号
{
if (v1 == G->vertices[i].data)
break;
}
for (j = 0; i < G->vexnum; j++)
{
if (v2 == G->vertices[j].data)
break;
}
ArcNode* p1 = (ArcNode*)malloc(sizeof(ArcNode)); //生成一个新的边结点
p1->adjvex = j; //邻接点序号为j,将新结点*p1插入顶点vi的边表头部
p1->nextarc = G->vertices[i].firstarc;
G->vertices[i].firstarc = p1;
//若生成的是有向图,下面4行代码移除
ArcNode* p2 = (ArcNode*)malloc(sizeof(ArcNode)); //生成一个新的边结点
p2->adjvex = i; //邻接点序号为i,将新结点*p2插入顶点vj的边表头部
p2->nextarc = G->vertices[j].firstarc;
G->vertices[j].firstarc = p2;
}
return OK;
}②采用邻接表表示法创建无向网:
Status CreateUDG(ALGraph *G) //创建无向网G
{
scanf("%d %d", &G->vexnum, &G->arcnum); //输入总顶点数和总边数
for (int i = 0; i < G->vexnum; i++) //输入各点,构造表头结点表
{
scanf("%c", &G->vertices[i].data); //输入顶点值(顶点名称)
G->vertices[i].firstarc = NULL; //初始化表头结点的指针域为NULL
}
for (int k = 0; k < G->arcnum; k++) //输入各边,构造边表
{
VerTexType v1, v2;
ArcType w;
scanf("%c %c %d", &v1, &v2, &w); //输入一条边依附的两个顶点及其权值
int i, j;
for (i = 0; i < G->vexnum; i++) //确定v1和v2在G中的位置,即顶点在G.vertices中的序号
{
if (v1 == G->vertices[i].data)
break;
}
for (j = 0; i < G->vexnum; j++)
{
if (v2 == G->vertices[j].data)
break;
}
ArcNode* p1 = (ArcNode*)malloc(sizeof(ArcNode)); //生成一个新的边结点
p1->adjvex = j; //邻接点序号为j,将新结点*p1插入顶点vi的边表头部
p1->nextarc = G->vertices[i].firstarc;
p1->info = w;
G->vertices[i].firstarc = p1;
//若生成的是有向网,下面5行代码移除
ArcNode* p2 = (ArcNode*)malloc(sizeof(ArcNode)); //生成一个新的边结点
p2->adjvex = i; //邻接点序号为i,将新结点*p2插入顶点vj的边表头部
p2->nextarc = G->vertices[j].firstarc;
p2->info = w;
G->vertices[j].firstarc = p2;
}
return OK;
}(8)邻接表表示法的优缺点:
①优点:便于增加和删除顶点;便于统计边的数目,按顶点表顺序查找所有边表可得到边的数目,时间复杂度为O(n+e);空间效率高,邻接表或逆邻接表表示的空间复杂度为O(n+e),适合表示稀疏图。
②缺点:不便于判断顶点之间是否有边;不便于计算有向图各个顶点的度。
3、十字链表
(1)十字链表是有向图的另一种链式存储结构,可以看成将有向图的邻接表和逆邻接表结合起来得到的一种链表。
(2)在十字链表中,对应于有向图中每一条弧有一个结点,对应于每个顶点也有一个结点。
①在弧结点中有5个域,其中尾域和头域分别指示弧尾和弧头这两个顶点在图中的位置,链域hlink指向弧头相同的下一条弧,而链域tlink指向弧尾相同的下一条弧,info域指向该弧的相关信息。
②弧头相同的弧在同一链表上,弧尾相同的弧也在同一链表上,它们的头结点即顶点结点,由3个域组成,其中data存储和顶点相关的信息,如顶点的名称等,firstin和firstout为两个链域,分别指向以该顶点为弧头或弧尾的第一个弧结点。

(3)有向图的十字链表存储表示形式说明如下:
#define MaxInt 32767 //表示极大值,即无穷
#define MVNum 100 //最大顶点数
#define MAX_VERTEX_NUM 20
typedef char VerTexType; //假设顶点的数据类型为字符型
typedef int ArcType; //假设边的权值类型为整型
typedef struct ArcBox
{
int tailvex, headvex; //该弧的尾和头顶点的位置
struct ArcBox *hlink, *tlink; //分别为弧头相同和弧尾相同的弧的链域
ArcType info; //该弧的相关信息(比如权值)
}ArcBox;
typedef struct VexNode
{
VerTexType data;
ArcBox *firstin, *firstout; //分别指向该顶点第一条入弧和出弧
}VexNode;
typedef struct OLGraph
{
VexNode xList[MAX_VERTEX_NUM]; //表头向量
int vexnum, arcnum; //有向图的当前顶点数和弧数
}OLGraph;4、邻接多重表
(1)邻接多重表是无向图的另一种链式存储结构。
(2)在邻接多重表中:
①每一条边用一个结点表示,它由6个域组成:其中mark为标志域,用以标记该条边是否被搜索过;ivex和jvex为该边依附的两个顶点在图中的位置;ilink指向下一条依附于顶点ivex的边;jlink指向下一条依附于顶点ivex的边;info为指向和边相关的各种信息的指针域。
②每一个顶点也用一个结点表示,它由两个域组成,其中data存储和该顶点相关的信息,firstedge指示第一条依附于该顶点的边。

(3)无向图的邻接多重表存储表示形式说明如下:
#define MaxInt 32767 //表示极大值,即无穷
#define MVNum 100 //最大顶点数
#define MAX_VERTEX_NUM 20
typedef char VerTexType; //假设顶点的数据类型为字符型
typedef int ArcType; //假设边的权值类型为整型
typedef enum
{
unvisited,
visited
}VisitIf;
typedef struct EBox
{
VisitIf mark; //访问标记
int ivex, jvex; //该边依附的两个顶点的位置
struct EBox *ilink, *jlink; //分别指向依附这两个顶点的下一条边
ArcType info; //该边的信息(比如权)
}EBox;
typedef struct VexBox
{
VerTexType data;
EBox *firstedge; //指向第一条依附该顶点的边
}VexBox;
typedef struct AMLGraph
{
VexBox adjmulist[MAX_VERTEX_NUM];
int vexnum, edgenum; //无向图的当前顶点数和边数
}AMLGraph;三、图的遍历
1、深度优先搜索
(1)深度优先搜索(Depth First Search,DFS)遍历类似于树的先序遍历,是树的先序遍历的推广。
(2)对于一个连通图,深度优先搜索遍历的过程如下:
①从图中某个顶点v出发,访问v。
②找出刚访问过的顶点的第一个未被访问的邻接点,访问该顶点。以该顶点为新顶点重复此步骤,直至刚访问过的顶点没有未被访问的邻接点为止。
③返回前一个访问过的且仍有未被访问的邻接点的顶点,找出该顶点的下一个未被访问的邻接点,访问该顶点。
④重复步骤2和步骤3,直至图中所有顶点都被访问过,搜索结束。
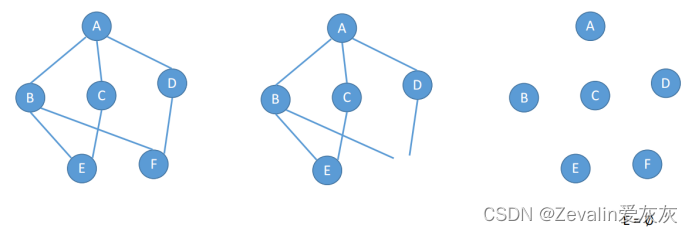
(3)下一图(b)中所示的所有顶点加上标有实箭头的边,构成一棵以v为根的树,称之为深度优先生成树,如下二图(a)所示。
(4)算法具体实现:
①采用邻接矩阵表示连通图的深度优先搜索遍历:
bool visited_AM[MVNum];
void DFS_AM(AMGraph G, int v) //深度优先搜索遍历连通图
{
printf("%c", G.vexs[v]);
visited_AM[v] = true; //访问第v个顶点,并置访问标志数组相应分量值为true
for (int w = 0; w < G.vexnum; w++) //依次检查邻接矩阵v所在行
{
if ((G.arcs[v][w] != 0) && (!visited_AM[w])) //如果w未被访问,则递归调用该函数
DFS_AM(G, w);
}
}②采用邻接表表示连通图的深度优先搜索遍历:
bool visited_AM[MVNum];
void DFS_AMTraverse(AMGraph G) //对非连通图进行深度优先遍历
{
for (int v = 0; v < G.vexnum; v++) //访问标志数组初始化
visited_AM[v] = false;
for (int v = 0; v < G.vexnum; v++)
if (!visited_AM[v])
DFS_AM(G, v);
}③采用邻接矩阵表示非连通图的深度优先搜索遍历:
bool visited_AL[MVNum];
void DFS_AL(ALGraph G, int v) //深度优先搜索遍历连通图
{
printf("%c", G.vertices[v].data);
visited_AL[v] = true; //访问第v个顶点,并置访问标志数组相应分量值为true
ArcNode* p = G.vertices[v].firstarc; //p指向v的边链表的第一个边节点
while (p != NULL) //边节点非空
{
int w = p->adjvex; //w是v的邻接点
if (!visited_AL[w]) //如果w未访问,则递归调用该函数
DFS_AL(G, w);
p = p->nextarc; //p指向下一个边节点
}
}④采用邻接表表示非连通图的深度优先搜索遍历:
bool visited_AL[MVNum];
void DFS_ALTraverse(ALGraph G) //对非连通图进行深度优先遍历
{
for (int v = 0; v < G.vexnum; v++) //访问标志数组初始化
visited_AL[v] = false;
for (int v = 0; v < G.vexnum; v++)
if (!visited_AL[v])
DFS_AL(G, v);
}(5)当用邻接矩阵表示图时,查找每个顶点的邻接点的时间复杂度为O(),其中n为图中顶点数;当以邻接表作为存储结构时,深度优先搜索遍历图的时间复杂度为O(n+e)。由此可得,稠密图适合在邻接矩阵上进行深度遍历,稀疏图适合在邻接表上进行深度遍历。
(6)同一个图的邻接矩阵表示方式唯一,因此深度优先遍历序列唯一;同一个图邻接表表示方式不唯一,因此深度优先遍历序列不唯一。
2、广度优先搜索
(1)广度优先搜索(Breadth First Search,BFS)遍历类似于树的按层次遍历,是树的层次遍历的推广。
(2)广度优先搜索遍历的过程如下:
①从图中某个顶点v出发,访问v。
②依次访问v的各个未曾访问过的邻接点。
③分别从这些邻接点出发依次访问它们的邻接点,并使“先被访问的顶点的邻接点”先于“后被访问的顶点的邻接点”被访问。
④重复步骤3,直至图中所有已被访问的顶点的邻接点都被访问到。
(3)下一图(c)中所示的所有顶点加上标有实箭头的边,构成一棵以v为根的树,称之为广度优先生成树,如下二图(b)所示。
(4)算法具体实现:
①采用邻接矩阵表示连通图的广度优先搜索遍历:
bool visited_AM[MVNum];
void BFS_AM(AMGraph G, int v) //广度优先搜索遍历连通图
{
printf("%c", G.vexs[v]);
visited_AM[v] = true; //访问第v个顶点,并置访问标志数组相应分量值为true
SqQueue Q;
InitQueue(&Q);
EnQueue(&Q, v);
while (Q.front != Q.rear)
{
int u;
DeQueue(&Q, &u);
int w;
for (w = 0; w < G.vexnum; w++) //依次检查邻接矩阵u所在行
{
if ((G.arcs[u][w] != 0) && (!visited_AM[w])) //如果w未被访问
break;
}
while (w < G.vexnum)
{
if (!visited_AM[w])
{
printf("%c", G.vexs[w]);
visited_AM[w] = true;
EnQueue(&Q, w);
}
for (w = w + 1; w < G.vexnum; w++) //依次检查邻接矩阵u所在行
{
if ((G.arcs[u][w] != 0) && (!visited_AM[w])) //如果w未被访问
break;
}
}
}
}②采用邻接表表示连通图的广度优先搜索遍历:
bool visited_AL[MVNum];
void BFS_AL(ALGraph G, int v) //广度优先搜索遍历连通图
{
printf("%c", G.vertices[v]);
visited_AL[v] = true; //访问第v个顶点,并置访问标志数组相应分量值为true
SqQueue Q;
InitQueue(&Q);
EnQueue(&Q, v);
while (Q.front != Q.rear)
{
int u;
DeQueue(&Q, &u);
int w;
ArcNode* p = G.vertices[u].firstarc; //p指向u的边链表的第一个边节点
if (p != NULL)
w = p->adjvex;
while (w < G.vexnum)
{
if (!visited_AL[w])
{
printf("%c", G.vertices[w]);
visited_AL[w] = true;
EnQueue(&Q, w);
}
if (p != NULL)
{
w = p->adjvex;
p = p->nextarc;
}
else
break;
}
}
}③采用邻接矩阵表示非连通图的广度优先搜索遍历:
bool visited_AM[MVNum];
void BFS_AMTraverse(AMGraph G) //对非连通图进行广度优先遍历
{
for (int v = 0; v < G.vexnum; v++) //访问标志数组初始化
visited_AM[v] = false;
for (int v = 0; v < G.vexnum; v++)
if (!visited_AM[v])
BFS_AM(G, v);
}④采用邻接表表示非连通图的广度优先搜索遍历:
bool visited_AL[MVNum];
void BFS_ALTraverse(ALGraph G) //对非连通图进行广度优先遍历
{
for (int v = 0; v < G.vexnum; v++) //访问标志数组初始化
visited_AL[v] = false;
for (int v = 0; v < G.vexnum; v++)
if (!visited_AL[v])
BFS_AL(G, v);
} (5)当用邻接矩阵存储时,该算法的时间复杂度为O();用邻接表存储时,该算法的时间复杂度为O(n+e)。
(6)同一个图的邻接矩阵表示方式唯一,因此广度优先遍历序列唯一;同一个图邻接表表示方式不唯一,因此广度优先遍历序列不唯一。

















 3852
3852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











