







个人专栏—塑性力学
1.1 塑性力学基本概念 塑性力学基本概念
1.2 弹塑性材料的三杆桁架分析 弹塑性材料的三杆桁架分析
1.3 加载路径对桁架的影响 加载路径对桁架的影响
2.1 塑性力学——应力分析基本概念 应力分析基本概念
2.2 塑性力学——主应力、主方向、不变量 主应力、主方向、不变量
目录
- 个人专栏—塑性力学
- 加载路径: \color{green}加载路径: 加载路径: 材料在受力时所经历的应力和应变变化路径。在塑性力学中,加载路径对材料的变形行为和力学性能有着重要影响。
- 案例分析 \color{green}案例分析 案例分析
- 加载路径 1 \color{green}加载路径1 加载路径1
- 加载路径 2 \color{green}加载路径2 加载路径2
- 比较两种不同加载路径达到统一塑性极限载荷时,所得杆件中应力相同,但应变和位移不同。对于更复杂的静不定结构,更复杂的加载路径,结构内的应力分布也可能不同。
- 塑性问题不同于弹性问题的一个重要特点是: 当物体和结构发生塑性变形时,其应力、应变和位移依赖于外载的终值和加载历史。
加载路径: \color{green}加载路径: 加载路径: 材料在受力时所经历的应力和应变变化路径。在塑性力学中,加载路径对材料的变形行为和力学性能有着重要影响。
案例分析 \color{green}案例分析 案例分析
如图所示,理想弹塑性材料的三杆桁架受竖向力 P P P 和水平力 Q Q Q的作用

由弹塑性力学分析可知:
平衡方程 { σ 2 + 2 ( σ 1 + σ 3 ) 2 = P A 0 2 ( σ 1 − σ 3 ) 2 = Q A 0 几何方程 { ε 1 = δ x 2 l 0 + δ y 2 l 0 ε 2 = δ y l 0 ε 3 = δ y 2 l 0 − δ x 2 l 0 ε 2 = ε 1 + ε 3 理想弹塑性模型应力应变关系: σ = { E ε ( ε ≤ ε s ) σ s ( ε ≥ ε s ) \begin{gather*} \text{平衡方程}\quad \begin{cases} \sigma_2+\frac{\sqrt{2}(\sigma_1+\sigma_3)}{2}=\frac{P}{A_0}\\ \frac{\sqrt{2}(\sigma_1-\sigma_3)}{2}=\frac{Q}{A_0} \end{cases}\\ \text{几何方程}\quad \begin{cases} \varepsilon_1=\frac{\delta_x}{2l_0}+\frac{\delta_y}{2l_0}\\ \varepsilon_2=\frac{\delta_y}{l_0}\\ \varepsilon_3=\frac{\delta_y}{2l_0}-\frac{\delta_x}{2l_0}\\ \varepsilon_2=\varepsilon_1+\varepsilon_3 \end{cases}\\ \text{理想弹塑性模型应力应变关系:} \\ \sigma=\begin{cases} E\varepsilon & (\varepsilon\leq \varepsilon_s)\\ \sigma_s & (\varepsilon\geq \varepsilon_s) \end{cases} \end{gather*} 平衡方程{σ2+22(σ1+σ3)=A0P22(σ1−σ3)=A0Q几何方程⎩ ⎨ ⎧ε1=2l0δx+2l0δyε2=l0δyε3=2l0δy−2l0δxε2=ε1+ε3理想弹塑性模型应力应变关系:σ={Eεσs(ε≤εs)(ε≥εs)
加载路径 1 \color{green}加载路径1 加载路径1
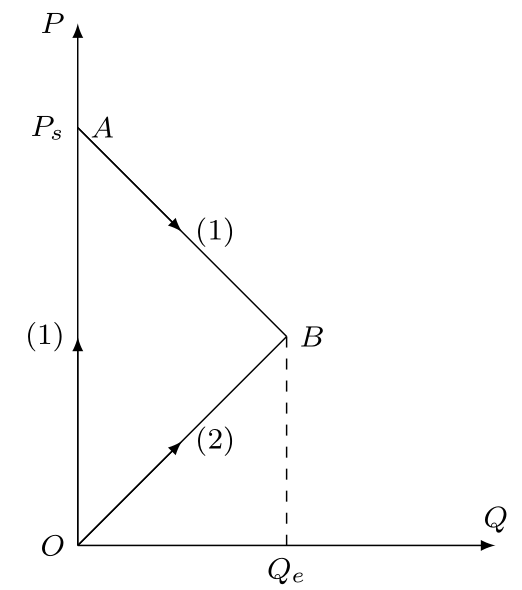
如图 $OA $所示,保持 $Q=0 $,加载 $P\rightarrow P_s(\sigma_sA_0(1+\sqrt{2})) $
可知杆内应力和节点位移 { σ 1 = σ 2 = σ 3 = σ s δ y = 2 δ e = δ s = 2 σ s l 0 E δ x = 0 保持竖直位移 δ y 不变,增加 Q → Q s ,由几何方程得 { Δ δ y = 0 , Δ δ x = δ x ≥ 0 Δ ε 2 = 0 Δ ε 1 = − Δ ε 3 = Δ δ x 2 l 0 ≥ 0 由应变增量可知,当1杆继续伸长,2杆不变,3杆卸载 { Δ σ 1 = Δ σ 2 = 0 Δ σ 3 = E Δ ε 3 = − E δ x / 2 l 0 ≤ 0 由增量形式平衡方程可知 { Δ σ 2 + 2 ( Δ σ 1 + Δ σ 3 ) 2 = Δ P A 0 2 ( Δ σ 1 − Δ σ 3 ) 2 = Δ Q A 0 → { Δ P A 0 = Δ σ 3 2 ≤ 0 Δ Q A 0 = − Δ σ 3 2 ≥ 0 → Δ P = − Δ Q \begin{gather*} \text{可知杆内应力和节点位移}\\ \begin{cases} \sigma_1=\sigma_2=\sigma_3=\sigma_s \\ \delta_y=2\delta_e=\delta_s=\frac{2\sigma_sl_0}{E}\\ \delta_x=0 \end{cases}\\ \text{保持竖直位移 $\delta_y $不变,增加 $Q\rightarrow Q_s $,由几何方程得}\\ \begin{cases} \Delta\delta_y=0, \quad \Delta\delta_x=\delta_x\ge 0\\ \Delta\varepsilon_2=0\\ \Delta\varepsilon_1=-\Delta\varepsilon_3=\frac{\Delta\delta_x}{2l_0}\ge 0 \end{cases}\\ \text{由应变增量可知,当1杆继续伸长,2杆不变,3杆卸载}\\ \begin{cases} \Delta\sigma_1=\Delta\sigma_2=0\\ \Delta\sigma_3=E\Delta\varepsilon_3=-E\delta_x/2l_0\le 0 \end{cases}\\ \text{由增量形式平衡方程可知}\\ \begin{cases} \Delta \sigma_2+\frac{\sqrt{2}(\Delta\sigma_1+\Delta\sigma_3)}{2}=\frac{\Delta P}{A_0}\\ \frac{\sqrt{2}(\Delta\sigma_1-\Delta\sigma_3)}{2}=\frac{\Delta Q}{A_0} \end{cases}\\ \rightarrow \begin{cases} \frac{\Delta P}{A_0}=\frac{\Delta \sigma_3}{\sqrt{2}}\le 0\\ \frac{\Delta Q}{A_0}=-\frac{\Delta \sigma_3}{\sqrt{2}}\ge 0 \end{cases} \rightarrow \Delta P=-\Delta Q \end{gather*} 可知杆内应力和节点位移⎩ ⎨ ⎧σ1=σ2=σ3=σsδy=2δe=δs=E2σsl0δx=0保持竖直位移 δy不变,增加 Q→Qs,由几何方程得⎩ ⎨ ⎧Δδy=0,Δδx=δx≥0Δε2=0Δε1=−Δε3=2l0Δδx≥0由应变增量可知,当1杆继续伸长,2杆不变,3杆卸载{Δσ1=Δσ2=0Δσ3=EΔε3=−Eδx/2l0≤0由增量形式平衡方程可知{Δσ2+22(Δσ1+Δσ3)=A0ΔP22(Δσ1−Δσ3)=A0ΔQ→{A0ΔP=2Δσ3≤0A0ΔQ=−2Δσ3≥0→ΔP=−ΔQ
为保持 $\delta_y $不变, $Q $增加时 $P $必须减小,如图 $AB $段所示。
当 $\Delta \sigma_3=-2\sigma_s, \sigma_3=-\sigma_s $,3杆进入反向屈服,整个桁架进入塑性流动状态,此时 $Q $不再增加
{ Q = Q s = Δ Q = 2 σ s A 0 P = Δ P + P s = − 2 σ s A 0 + σ s A 0 ( 1 + 2 ) = σ s A 0 桁架应力 σ 1 = σ 2 = σ s , σ 3 = − σ s 结合 Δ σ 3 = − 2 σ s 可得节点位移: δ y = δ s , δ x = Δ δ x = 4 σ s l 0 E = 2 δ s 由几何方程可求得应变: ε 1 = 3 ε s , ε 2 = 2 ε s , ε 3 = − ε s \begin{gather*} \begin{cases} Q=Q_s=\Delta Q=\sqrt{2}\sigma_sA_0\\ P=\Delta P+P_s=-\sqrt{2}\sigma_sA_0+\sigma_sA_0(1+\sqrt{2})=\sigma_sA_0 \end{cases}\\ \text{桁架应力}\quad \sigma_1=\sigma_2=\sigma_s, \quad \sigma_3=-\sigma_s\\ \text{结合}\Delta \sigma_3=-2\sigma_s\text{可得节点位移:}\\ \delta_y=\delta_s,\quad \delta_x=\Delta\delta_x=\frac{4\sigma_sl_0}{E}=2\delta_s\\ \text{由几何方程可求得应变:}\\ \varepsilon_1=3\varepsilon_s,\varepsilon_2=2\varepsilon_s,\varepsilon_3=-\varepsilon_s \end{gather*} {Q=Qs=ΔQ=2σsA0P=ΔP+Ps=−2σsA0+σsA0(1+2)=σsA0桁架应力σ1=σ2=σs,σ3=−σs结合Δσ3=−2σs可得节点位移:δy=δs,δx=Δδx=E4σsl0=2δs由几何方程可求得应变:ε1=3εs,ε2=2εs,ε3=−εs
加载路径 2 \color{green}加载路径2 加载路径2
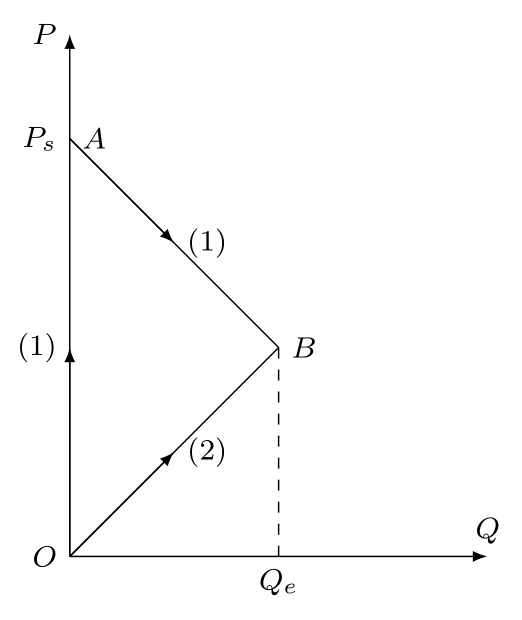
比例加载 $P:Q=1:\sqrt{2} $,直到桁架达到塑性极限状态,即 $P=\sigma_sA_0,Q=\sqrt{2}\sigma_sA_0 $,如图中路径 $OB $段所示。
弹性阶段由几何方程和平衡方程可知
ε 2 = ε 1 + ε 3 σ 2 = σ 1 + σ 3 将 Q = 2 P 代入平衡方程可得3个杆的应力 { σ 1 = P 2 A 0 ( 2 1 + 2 + 2 ) ≥ 0 σ 2 = P A 0 2 1 + 2 ≥ 0 σ 3 = P 2 A 0 ( 2 1 + 2 − 2 ) ≤ 0 \begin{gather*} \varepsilon_2=\varepsilon_1+\varepsilon_3\\ \sigma_2=\sigma_1+\sigma_3\\ \text{将 $Q=\sqrt{2}P $代入平衡方程可得3个杆的应力}\\ \begin{cases} \sigma_1=\frac{P}{2A_0}(\frac{\sqrt{2}}{1+\sqrt{2}}+2)\ge 0\\ \sigma_2=\frac{P}{A_0}\frac{\sqrt{2}}{1+\sqrt{2}}\ge 0\\ \sigma_3=\frac{P}{2A_0}(\frac{\sqrt{2}}{1+\sqrt{2}}-2)\le 0 \end{cases} \end{gather*} ε2=ε1+ε3σ2=σ1+σ3将 Q=2P代入平衡方程可得3个杆的应力⎩ ⎨ ⎧σ1=2A0P(1+22+2)≥0σ2=A0P1+22≥0σ3=2A0P(1+22−2)≤0
三者中 $\sigma_1 $最大,当 $\sigma_1=\sigma_s $时,桁架达到弹性极限状态
{ P e = σ s A 0 2 ( 1 + 2 ) 2 + 3 2 σ 1 e = σ s , ε 1 e = σ 1 e E = ε s σ 2 e = 2 2 2 + 3 2 σ s , ε 2 e = σ 2 e E σ 3 e = − 2 + 2 2 2 + 3 2 σ s , ε 3 e = σ 3 e E { δ x e = 2 + 2 2 2 + 3 2 δ e δ y e = 2 2 2 + 3 2 δ e 继续加载,1杆屈服 Δ σ 1 = 0 , Δ Q = 2 Δ P 由增量式平衡方程可知 { Δ σ 2 + 2 ( Δ σ 1 + Δ σ 3 ) 2 = Δ P A 0 2 ( Δ σ 1 − Δ σ 3 ) 2 = Δ Q A 0 → { Δ σ 3 = − 2 Δ P A 0 ≤ 0 Δ σ 2 = ( 1 + 2 ) Δ P A 0 ≥ 0 σ 1 = σ s , σ 2 = σ 2 e + Δ σ 2 , σ 3 = σ 3 e + Δ σ 3 当 σ 2 = σ s 时, Δ σ 2 = σ s − σ 2 e Δ P = σ s A 0 2 2 + 3 2 → Δ σ 3 = − 2 2 σ s 2 + 3 2 σ 3 = σ 3 e + δ σ 3 = − σ s 即桁架进入塑性状态 极限荷载为 P = P e + Δ P = σ s A 0 Q = 2 σ s A 0 = Q s → 极限荷载不因加载路径的不同而改变 Δ ε 2 = Δ σ 2 E = ( 1 + 2 ) Δ P A 0 E , Δ ε 3 = Δ σ 3 E = − 2 Δ P A 0 E Δ δ x = ( Δ ε 2 − 2 Δ ε 3 ) l 0 , Δ δ y = Δ ε 2 l 0 → δ x = 3 δ e , δ y = δ e , ε 1 = 2 ε s , ε 2 = − ε 3 = ε s \begin{gather*} \begin{cases} P_e=\sigma_sA_0\frac{2(1+\sqrt{2})}{2+3\sqrt{2}}\\ \sigma_1^e =\sigma_s,\quad \varepsilon_1^e=\frac{\sigma_1^e}{E}=\varepsilon_s\\ \sigma_2^e=\frac{2\sqrt{2}}{2+3\sqrt{2}}\sigma_s,\quad \varepsilon_2^e=\frac{\sigma_2^e}{E}\\ \sigma_3^e=-\frac{2+2\sqrt{2}}{2+3\sqrt{2}}\sigma_s,\quad \varepsilon_3^e=\frac{\sigma_3^e}{E} \end{cases}\quad \begin{cases} \delta_x^e=\frac{2+2\sqrt{2}}{2+3\sqrt{2}}\delta_e\\ \delta_y^e=\frac{2\sqrt{2}}{2+3\sqrt{2}}\delta_e \end{cases}\\ \text{继续加载,1杆屈服}\quad \Delta\sigma_1=0,\Delta Q=\sqrt{2}\Delta P\\ \text{由增量式平衡方程可知}\\ \begin{cases} \Delta \sigma_2+\frac{\sqrt{2}(\Delta\sigma_1+\Delta\sigma_3)}{2}=\frac{\Delta P}{A_0}\\ \frac{\sqrt{2}(\Delta\sigma_1-\Delta\sigma_3)}{2}=\frac{\Delta Q}{A_0} \end{cases}\rightarrow \begin{cases} \Delta \sigma_3=-\frac{2\Delta P}{A_0}\le 0\\ \Delta \sigma_2=\frac{(1+\sqrt{2})\Delta P}{A_0} \ge 0 \end{cases}\\ \sigma_1=\sigma_s,\quad \sigma_2=\sigma_2^e+\Delta\sigma_2, \quad \sigma_3=\sigma_3^e+\Delta\sigma_3\\ \text{当 $\sigma_2=\sigma_s $时,}\quad \Delta\sigma_2=\sigma_s-\sigma^e_2\\ \Delta P=\sigma_sA_0\frac{\sqrt{2}}{2+3\sqrt{2}}\rightarrow \Delta\sigma_3=-\frac{2\sqrt{2}\sigma_s}{2+3\sqrt{2}}\\ \sigma_3=\sigma_3^e+\delta\sigma_3=-\sigma_s \quad \text{即桁架进入塑性状态}\\ \text{极限荷载为}\quad P=P_e+\Delta P=\sigma_sA_0 \quad Q=\sqrt{2}\sigma_sA_0=Q_s\\ \rightarrow \text{极限荷载不因加载路径的不同而改变}\\ \Delta \varepsilon_2=\frac{\Delta \sigma_2}{E}=(1+\sqrt{2})\frac{\Delta P}{A_0E},\quad \Delta \varepsilon_3=\frac{\Delta \sigma_3}{E}=-\frac{2\Delta P}{A_0E}\\ \Delta \delta_x=(\Delta\varepsilon_2-2\Delta \varepsilon_3)l_0,\quad \Delta\delta_y=\Delta\varepsilon_2l_0\\ \rightarrow \delta_x=3\delta_e,\quad \delta_y=\delta_e,\quad \varepsilon_1=2\varepsilon_s,\quad \varepsilon_2=-\varepsilon_3=\varepsilon_s \end{gather*} ⎩ ⎨ ⎧Pe=σsA02+322(1+2)σ1e=σs,ε1e=Eσ1e=εsσ2e=2+3222σs,ε2e=Eσ2eσ3e=−2+322+22σs,ε3e=Eσ3e{δxe=2+322+22δeδye=2+3222δe继续加载,1杆屈服Δσ1=0,ΔQ=2ΔP由增量式平衡方程可知{Δσ2+22(Δσ1+Δσ3)=A0ΔP22(Δσ1−Δσ3)=A0ΔQ→{Δσ3=−A02ΔP≤0Δσ2=A0(1+2)ΔP≥0σ1=σs,σ2=σ2e+Δσ2,σ3=σ3e+Δσ3当 σ2=σs时,Δσ2=σs−σ2eΔP=σsA02+322→Δσ3=−2+3222σsσ3=σ3e+δσ3=−σs即桁架进入塑性状态极限荷载为P=Pe+ΔP=σsA0Q=2σsA0=Qs→极限荷载不因加载路径的不同而改变Δε2=EΔσ2=(1+2)A0EΔP,Δε3=EΔσ3=−A0E2ΔPΔδx=(Δε2−2Δε3)l0,Δδy=Δε2l0→δx=3δe,δy=δe,ε1=2εs,ε2=−ε3=εs
比较两种不同加载路径达到统一塑性极限载荷时,所得杆件中应力相同,但应变和位移不同。对于更复杂的静不定结构,更复杂的加载路径,结构内的应力分布也可能不同。
塑性问题不同于弹性问题的一个重要特点是: 当物体和结构发生塑性变形时,其应力、应变和位移依赖于外载的终值和加载历史。
如果你喜欢以上内容,或者对此感兴趣,欢迎一键三连,博主将持续更新,如果有任何问题,可以咨询博主,非常乐意为大家解答。
















 1086
1086











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











