







个人专栏—塑性力学
1.1 塑性力学基本概念 塑性力学基本概念
1.2 弹塑性材料的三杆桁架分析 弹塑性材料的三杆桁架分析
1.3 加载路径对桁架的影响 加载路径对桁架的影响
2.1 塑性力学——应力分析基本概念 应力分析基本概念
2.2 塑性力学——主应力、主方向、不变量 主应力、主方向、不变量
目录

应力 \color{blue}应力 应力:内力的分布集度
- 全应力
p = lim Δ A → 0 Δ P Δ A = d P d A p=\lim_{\Delta A\to 0}\frac{\Delta P}{\Delta A}=\frac{\mathrm{d}\mathbf{P}}{\mathrm{d}A} p=ΔA→0limΔAΔP=dAdP
- 正应力:垂直于截面的应力
σ = lim Δ A → 0 Δ N Δ A = d N d A \sigma=\lim_{\Delta A\to 0}\frac{\Delta N}{\Delta A}=\frac{\mathrm{d}\mathbf{N}}{\mathrm{d}A} σ=ΔA→0limΔAΔN=dAdN
- 剪应力: 位于截面上的应力
ε = lim Δ A → 0 Δ T Δ A = d T d A \varepsilon=\lim_{\Delta A\to 0}\frac{\Delta T}{\Delta A}=\frac{\mathrm{d}\mathbf{T}}{\mathrm{d}A} ε=ΔA→0limΔAΔT=dAdT
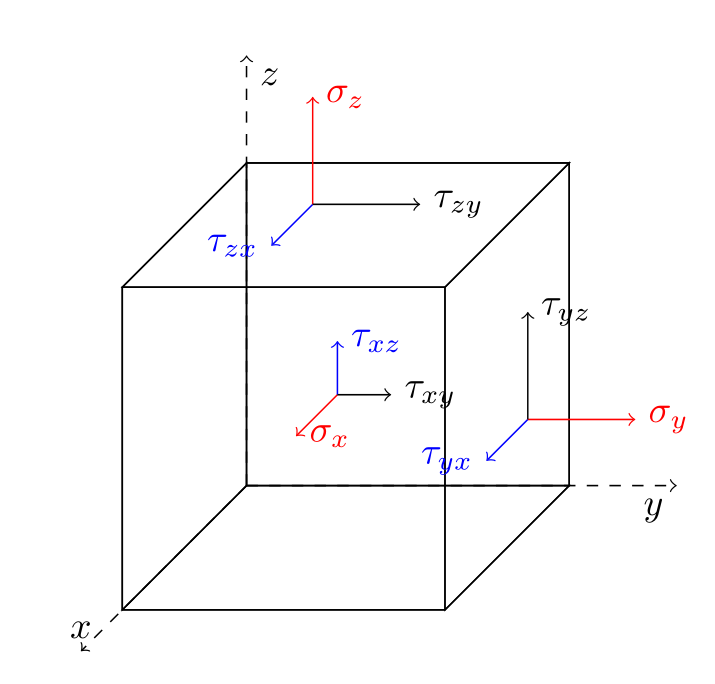
单元体 \color{blue}单元体 单元体: 构件内点的代表物,是包围被研究点的无限小几何体,常用正六面体表示。
-
正应力 $\sigma_i $表示作用在垂直 $i $轴的面上,方向沿 $i $轴的应力;
-
剪应力 $\tau_{ij} $表示作用在垂直 $i $轴的面上,方向沿 $j $轴的应力;
-
剪应力互等定理
τ x y = τ y x τ y z = τ − z y τ x z = τ z x \tau_{xy}=\tau_{yx}\quad \tau_{yz}=\tau-{zy}\quad \tau_{xz}=\tau_{zx} τxy=τyxτyz=τ−zyτxz=τzx
应力张量 \color{blue}应力张量 应力张量:应力张量是描述物体内部应力状态的物理量,它是一个二阶张量。二阶表示它有两个指标,而张量表示它在坐标系变换下的变换规律。
-
应力张量的元素可以表示为 σ i j σ_{ij} σij,其中 i i i和 j j j分别表示坐标轴的索引。这些元素表示了在某个点上,物体内部在不同方向上的应力大小和方向。例如, σ x x \sigma_{xx} σxx表示物体在x轴上的正向应力分量, σ x y \sigma_{xy} σxy表示物体在x轴和y轴之间的剪切应力分量。
-
应力张量为二阶对称张量: $\sigma_{ij}=\sigma_{ji} $,任一点的应力状态完全由应力张量确定;
σ i j = [ σ x τ x y τ x z τ y x σ y τ y z τ z x τ z y σ z ] = [ σ 11 σ 12 σ 13 σ 21 σ 22 σ 23 σ 31 σ 32 σ 33 ] \sigma_{ij}=\begin{bmatrix} \sigma_x & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z \end{bmatrix}=\begin{bmatrix} \sigma_{11} & \sigma_{12} & \sigma_{13} \\ \sigma_{21} & \sigma_{22} & \sigma_{23} \\ \sigma_{31} & \sigma_{32} & \sigma_{33} \end{bmatrix} σij= σxτyxτzxτxyσyτzyτxzτyzσz = σ11σ21σ31σ12σ22σ32σ13σ23σ33
- 应力张量的对称性是由物体力学平衡和牛顿第三定律所决定的。根据力学平衡的要求,物体内部的力矩必须为零,而对称性是力矩为零的一个必要条件。另外,根据牛顿第三定律,作用于物体上的力和反作用力必须相等且方向相反。这意味着应力张量在不同坐标轴上的应力分量必须满足对称性。
在外力作用下,物体的变形可分为体积变形和形状变形,由静水压力试验结果可知,静水压力只引起体积变化,而不改变形状改变,故可将应力张量进行分解:
σ m = σ x + σ y + σ z 3 = σ 1 + σ 2 + σ 3 3 σ i j = [ σ x τ x y τ x z τ y x σ y τ y z τ z x τ z y σ z ] = [ σ m 0 0 0 σ m 0 0 0 σ m ] + [ σ x − σ m τ x y τ x z τ y x σ y − σ m τ y z τ z x τ z y σ z − σ m ] = σ m δ i j + S i j δ i j = { 1 i = j 0 i ≠ j = [ 1 0 0 0 1 0 0 0 1 ] → σ m δ i j = [ σ m 0 0 0 σ m 0 0 0 σ m ] \begin{align*} \sigma_m&=\frac{\sigma_x+\sigma_y+\sigma_z}{3}=\frac{\sigma_1+\sigma_2+\sigma_3}{3}\\ \sigma_{ij}&=\begin{bmatrix} \sigma_x & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z \end{bmatrix}\\ &=\begin{bmatrix} \sigma_m & 0 & 0 \\ 0 & \sigma_m & 0 \\ 0 & 0 & \sigma_m \end{bmatrix}+\begin{bmatrix} \sigma_x-\sigma_m & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y-\sigma_m & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z-\sigma_m \end{bmatrix}\\ &=\sigma_m\delta_{ij}+S_{ij}\\ \delta_{ij}&=\begin{cases} 1 & i=j\\ 0 & i\ne j \end{cases}=\begin{bmatrix} 1 & 0 & 0\\ 0 & 1 & 0\\ 0 & 0 & 1\\ \end{bmatrix}\to \sigma_m\delta_{ij}=\begin{bmatrix} \sigma_m & 0 & 0 \\ 0 & \sigma_m & 0 \\ 0 & 0 & \sigma_m \end{bmatrix} \end{align*} σmσijδij=3σx+σy+σz=3σ1+σ2+σ3= σxτyxτzxτxyσyτzyτxzτyzσz = σm000σm000σm + σx−σmτyxτzxτxyσy−σmτzyτxzτyzσz−σm =σmδij+Sij={10i=ji=j= 100010001 →σmδij= σm000σm000σm
-
应力球张量(静水压力)
-
任意截面上的均值应力等于 $\sigma_m $;
-
应力球张量与坐标的选择无关;
-
应力球张量与材料体积变形有关;
-
-
应力偏张量$S_{ij} $
-
应力偏张量材料形变有关,即与塑性变形有关;
-
应力偏张量为对称张量。
-
应用示例
已知某点的应力状态 KaTeX parse error: {equation*} can be used only in display mode.,将该应力状态写成张量形式并分解。
σ i j = [ σ x τ x y τ x z τ y x σ y τ y z τ z x τ z y σ z ] = [ 1000 150 0 150 500 70 0 70 0 ] σ m = σ x + σ y + σ z 3 = 500 \begin{gather*} \sigma_{ij}=\begin{bmatrix} \sigma_x & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z \end{bmatrix}=\begin{bmatrix} 1000 & 150 & 0 \\ 150 & 500 & 70 \\ 0 & 70 & 0 \end{bmatrix}\\ \sigma_m=\frac{\sigma_x+\sigma_y+\sigma_z}{3}=500 \end{gather*} σij= σxτyxτzxτxyσyτzyτxzτyzσz = 10001500150500700700 σm=3σx+σy+σz=500
σ i j = [ σ m 0 0 0 σ m 0 0 0 σ m ] + [ σ x − σ m τ x y τ x z τ y x σ y − σ m τ y z τ z x τ z y σ z − σ m ] = [ 500 0 0 0 500 0 0 0 500 ] + [ 500 150 0 150 0 70 0 70 − 500 ] \begin{align*} \sigma_{ij}&=\begin{bmatrix} \sigma_m & 0 & 0 \\ 0 & \sigma_m & 0 \\ 0 & 0 & \sigma_m \end{bmatrix}+\begin{bmatrix} \sigma_x-\sigma_m & \tau_{xy} & \tau_{xz} \\ \tau_{yx} & \sigma_y-\sigma_m & \tau_{yz} \\ \tau_{zx} & \tau_{zy} & \sigma_z-\sigma_m \end{bmatrix}\\ &=\begin{bmatrix} 500 & 0 & 0 \\ 0 & 500 & 0 \\ 0 & 0 & 500 \end{bmatrix}+\begin{bmatrix} 500 & 150 & 0 \\ 150 & 0 & 70 \\ 0 & 70 & -500 \end{bmatrix} \end{align*} σij= σm000σm000σm + σx−σmτyxτzxτxyσy−σmτzyτxzτyzσz−σm = 500000500000500 + 5001500150070070−500
承接DIC数据图像处理模拟散斑制作(斑点直径≥0.1mm)及DIC散斑图像代处理:

散斑贴制作及DIC数字图像处理
如果你喜欢以上内容,或者对塑性力学感兴趣,欢迎一键三连,博主将持续更新,如果有任何问题,可以咨询博主,非常乐意为大家解答。
















 2082
2082











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












{kind=link}