






为什么广角镜头的视野会比长焦镜头的视野大呢?
我之前用等光程解释了景深,也解释了为什么焦距越远,成像越大,但是从来没有提到过视野范围这个概念。实际上在我之前建立的数学模型中,物曲面S是无限大的,像曲面S1也是无限大的。但是实际的照相机中,照片是被框住了的,也就是像曲面S1的大小是固定的,那么怎样使得在S1固定的情况下,物曲面S尽可能的大呢?
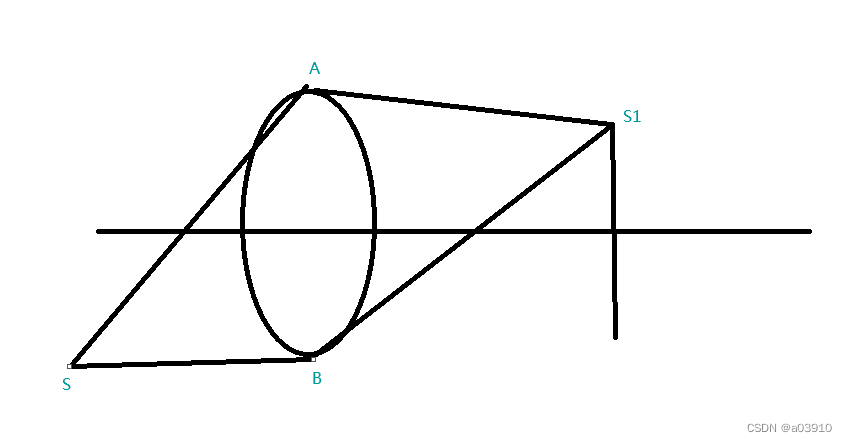
首先,根据费马原理,这是个非常好用的原理,因为可以不用考虑折射,反射,只需要关注问题本身了,譬如这里,从S发出的光在透镜中发生了折射,但是由于折射只是最小光程的结果,光线的路径可以是任意的,那么我随意画,只要等光程即可,反正最后是选择其中光程最小的路径即可,而且这种任意性使得最小光程也符合我从任意的情况下总结出的一般性的规律。
首先有SA+SB=AS1+BS1。
所以就是SA-SB=常数2a,那么S的路径就是个双曲线了,AB的光程2c,(+-c,0)是双曲线的焦点。
注意,这里面,SA和SB是空气的光程,AB是介质中的光程,不一样。A和B是透镜的边界点。
首先假设SA-SB=2a, 可以画出来双曲线如图所示:
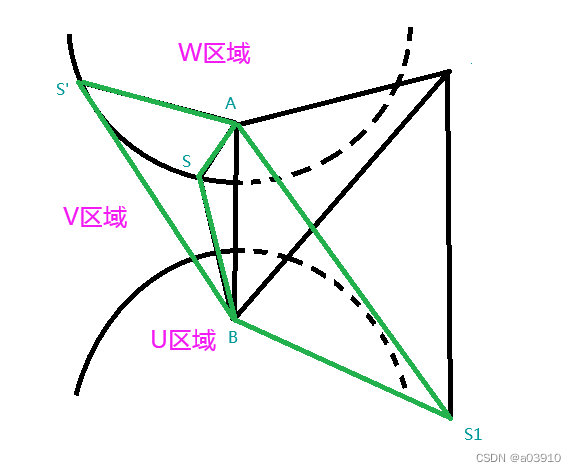
所以到达S1曲面的边界的位置的像点分布在双曲线上,如果是W区域和U区域发出的光呢?比如S'A-S'B大于AB了,那么就会需要像曲面S1更大或者更靠前才能使得像边界点到A和B的光程差变大。而如果是在V区域的点,由于光程差S'A-S'B变小,只要把到像边界位置的点向光轴靠近,就可以缩小光程差了。
所以可以总结出来,透镜左边的物区域,只有V区域包含双曲线的位置是可以在固定大小的成像曲面S1上的。
但是有个问题,我右边给出的是成像曲面是2维度的,左边却是空间区域是3维度的,维度不一样啊。所以,左边的双曲线中,S'点被S点遮挡住了?这还真是个问题,因为右边的光程路径是一样的,但是光线并没有被遮挡,如果改变光圈AB大小,比如缩小AB,那么S'和S在像曲面S中的位置都向光轴靠拢,但是S的光程差改变较大,所以S在像S1中的位置更向光轴靠拢。
物S'和S的最小光程在像曲面S中的位置可能不同,这只是某个光线路径的光程相同,并一定是像点。
我给出像点的定义:所谓的像点就是到达这个点的所有的光程都相等,如果只是部分光程相等,那就不是像点。
然后我给出最小光程的解释:最小光程说的是折射的意思。如果所有的光程在像曲面S1上的某个点都相等,那所有的光程都是最小光程了。
=========================================================================
首先考虑双曲线的存在的问题
从最坏的情况考虑,假设双曲线上的物点S'和S的所有光程都在像曲面上,并且最小光程的像点在像曲面S的位置是一样的。那么可以认为这个双曲线是不成像的,因为光线重合了。也就是说在成像的边界处是不成像的,只能感受到有光,但是没有信息。
这个最坏的情况是成像的视野? 为什么是这样的呢?因为成像的视野总有边界存在,那么这个边界是什么呢?先不回答这个问题。先考虑这种双曲线的存在性的问题:存在在边界上的点y0,在透镜坐标的物区中,存在一条双曲线,使得在这条曲线上的每一个点到达y的任意光程都相同。
假设不存在这样的点呢?也就意味着不存在这样的双曲线,这就是说物区域的任意点到透镜的左边成像的像点是一一对应的,注意这是3维空间对应3维空间,之前是2维对应的。
本来从数学上说确实应该是3维流形之间同胚,但是物理上,有辨识度的问题,其实分不清的时候,就会造成是并没有一一对应,而是多对一对应,意味着这样的双曲线确实存在,但不是无限延伸,而是较短的长度。在V区中,存在重重叠叠地这样的双曲线,每条双曲线代表的是透镜的分辨率,双曲线长度非常短,使得无法看清楚视野范围中的几毫米,甚至微毫米的物体的结构。
既然短的存在,那么边界位置确实是也存在极短双曲线的。但是我想要的是长的双曲线,有没有?
这就要看透镜有没有做到3维空间之间的同胚了,我认为并没有做到,因为我之前考虑过了,在二维曲面同胚的时候,我认为只需要这个映射是覆盖映射即可,只需要像空间是单连通的。
我个人提出的数学模型,其实应该建立在代数拓扑的基础上更合理,这样就是更推广了应用的范围了。但是我并不知道照相机的镜头是什么曲面,所以到底有没有做到3维空间的同胚是未知的。
从另一个方面考虑,假设这样的长的双曲线确实存在,那么一定会是在边界上吗?从现实看,也只能出现在边界上,因为在像中间的斑点现实并没有看到。
结论就是: 长的双曲线不知道,但是极小的双曲线确实存在, 并且这种存在是重叠的,因为分辨率了的问题。
=========================================================================
现在从重叠的极短双曲线讨论视野的问题。
假设长双曲线不存在,把成像曲面S1的边界点y0的原像f-1(y0)视为极短双曲线,由这些重重叠叠的极短双曲线,就组成了包围物曲面S的3维空心但是有一定厚度的球。
尽管极短双曲线并没有连成无限长双曲线,而是有一定的错开,但是可以近似认为是一条无限长双曲线,因为这在解释视野上差别不大。
我现在解决透镜右边像曲面是2维的,左边物区域是三维的问题。
实际上同胚的只能是二维的,也就是说能清晰看到的是二维流形,其余的三维的是不清晰的。也就是说在V区域只表示能看到的,但是在任何情况下,能够清晰成像的都是二维的流形,比如三维空间中的球面是二维的。在最小光程双曲线上,W和U区域包括双曲线是不可见的,但是W区域是不在成像曲面S上。而双曲线上是在成像曲面S的边界上,但只是能感受到光而没有信息。
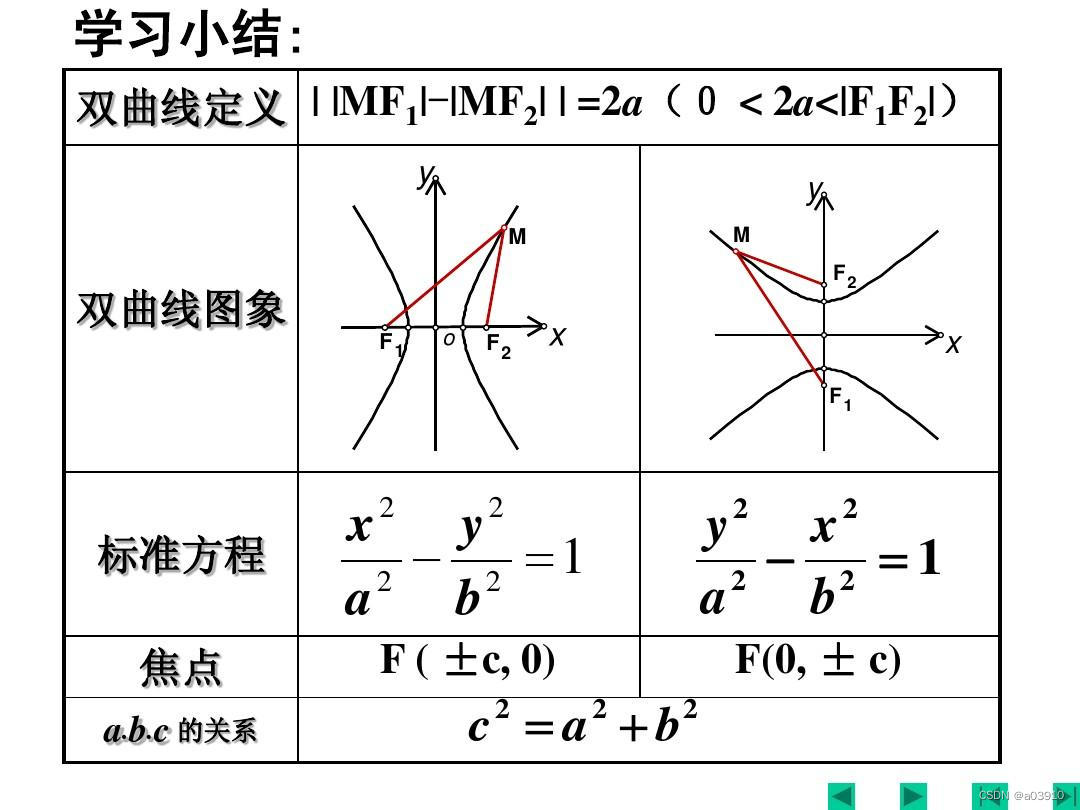 当透镜大小,即光程AB=2c不变的时候,而当焦距变小的时候,像曲面S1的距离变小了,即是SA-SB=2a变大了。
当透镜大小,即光程AB=2c不变的时候,而当焦距变小的时候,像曲面S1的距离变小了,即是SA-SB=2a变大了。
渐近线公式:y=±(a/b)x (焦点在y轴上)
aa+bb=cc, 所以b变小了,所以渐近线的斜率变大了,所以我上面的W区域和U区域更小了。所以短焦的视野更大,就是这个道理。
从上面的分析可以知道,要想视野范围变大,需要AB变小,即透镜的直径更小,或者焦距变小,这会使得视野更广。
========================================================================
现在讨论一下广角镜头,甚至是鱼眼镜头的畸变。
所以,广角镜头为什么会有从中心向周围膨胀的视野呢?
当镜头对焦到物体上的时候,物体S周围的极短双曲线效果就会明显产生,这是分辨率的问题造成的。具体解释是: 物体对焦的部分要清晰成像,其他的地方是模糊的,而清晰成像由于分辨率不能清晰到毫米甚至是微毫的尺度,所以在这个尺度下,会发生双曲线效应。这种效应是重重叠叠的,而模糊成像的地方不会有明显的双曲线效应,因为本来就是物理上光重叠了,观察装置能够分清楚这是模糊的。清晰成像部分是物理上光几乎没有重叠,但是观察装置的分不清认为成像曲面S1前后移动一定的距离dx无影响,这种物理上的光稍微重叠,造成了景深的概念和双曲线效应。
既然极短双曲线是稍微错位,我直接从长双曲线讨论畸变简化过程了。
所以就是,如果要把带有一定景深的空间物体D映射到成像曲面S1上,可以知道的是D区域的远处在视野中呈现的空间更多,近处在视野中呈现的空间更少。但是如果成像曲面换成是矩形,宽度一样的矩形会怎么样?只能是远处的物体被压缩了,所以会有膨胀的效果,至少在景深的区域中会是这样的。超过景深区域,就没有这种效果了。所以更远处或者更近处虽然模糊,但是不会有明显变形。所以双曲线效应只在景深中发生了。
========================================================================
但是为什么是广角镜头才有,长焦镜头看不出来呢?
这跟压缩的程度有关,短焦镜头压缩程度大,根据我上面的渐近线的说法,但是景深小,我之前讨论过景深和焦距的关系。景深越小,越说明观察装置的这个时候的分辨能力是较高的,双曲线较短。(实际上分辨能力从弥散圆看都是固定的,因为弥散圆的半径是固定的,只是具体观察的时候,相同的弥散圆看到的细节尺度不同,我是从实际观察到的尺度判定的分辨能力。)
同时,压缩范围跟景深的深度有关。景深小,意味着在画面中清晰区域占比小,所以畸变的区域不多。
长焦镜头的压缩程度小,因为双曲线的渐近线,景深比较深。景深越深,越说明观察装置的这个时候的分辨能力是较差的,双曲线较长。双曲线长只会影响观察的尺度,也就是说如果短焦镜头能观察到毫米的结构,那么长焦镜头只能观察到厘米的结构了,所以长焦不可能比短焦更清晰。
所以景深决定了清晰区域的大小和分辨率。景深深,清晰区域大,但是分辨率下降了。景深小,清晰区域小,分辨率上升。
========================================================================
总结:
那么我再改一下,畸变只跟双曲线的渐近线的斜率有关,而跟双曲线的长短无关。改变斜率可以改变光圈和焦距。光圈越小,焦距越短,斜率越大,畸变越明显。但是光圈越小,景深越深,意味着在矩形画面中,畸变的所占据的范围更大,因为矩形的长宽是固定的,清晰的区域变多了。
========================================================================
第二天再次总结: 我再想了一下,感觉还是上面的内容做的一塌糊涂。
双曲线没问题,极短双曲线也合理,但是我没有给出更具体的说明了,因为我也给不出来。
我只得出了这是个覆盖映射的结论,但是更具体的数学模型我也给不出来,所以感觉一切都没啥进展。感觉这是非常有用的概念,但是我只能开个头,其他的没法子了。(我前面的数学模型仅仅涉及到微分同胚,因为只是曲面之间的关系,但是这个模型并不和现实接近。主要是弥散圆是观察仪器的引起的。如果考虑到整个物区域的空间和弥散圆,那么微分同胚不够用了,代数拓扑的概念更合适,但是这个模型也只是几何光学概念下的模型,还没有涉及到波动光学,所以也并非完全适合现实。)
至于畸变效果,如果广角镜头的视野是直线的,那么看起来一切都是笔直的,但是实际上有膨胀效果,所以我提出的双曲线视野更合理。但是我也没有具体解释为什么会压缩,直观感受是不需要压缩啊。其实,具体解释压缩过程很简单。
=========================================================================
写一个具体的成像的原理。
首先成像感觉是3维的物体照在了2维的矩形上。但是事实并不完全是这样。
事实是物曲面S的二维流形和像曲面S1的二维流形同胚,这是为什么会有像的基础,但是这是非常精确地成像,精确到无限小的尺寸上。实际上人眼看毫米就困难了,所以人眼不需要这么精准的成像,由于成像曲面S1是固定的,所以物体前后可以移动,依然会看起来是清晰的,这就是景深的概念。景深是立体感的由来,不然看到的物体只是个曲面,就很奇怪。
但是在景深区域D中的画面如何恰当的呈现在成像曲面S1中的呢?毕竟D是3维流形,而S1是二维流形,已经不同胚了。那只能重新建立映射和关系了,可以认为在D区域中,存在一条穿过前后面的双曲线,这个双曲线段上的点都映射到S1的同一个位置。这就是覆盖映射的来历。
以下图为例:
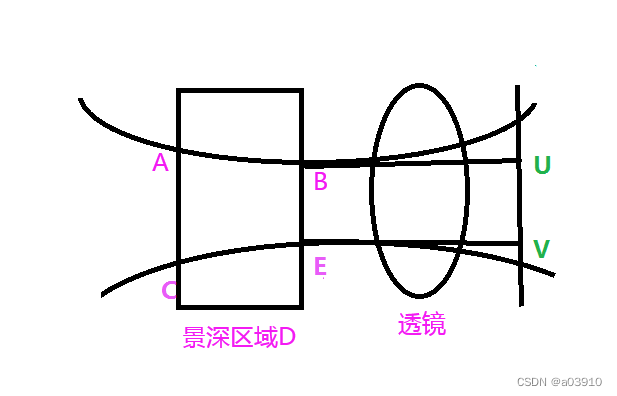
双曲线段AB代表的在这个深度下的,无法区分的程度。越长表示无法区分的距离越大,在一般的情况下,曲线AB段和CE段近似为直线,意味着只要将3维区域D作近似的线性变换a,就能够把
3维的区域ACEB(我这里没画出来是3维的,但是实际上就是,我只能用几个字幕表示成了平面上的图。)缩小成3维的矩形ACEB,他的特点是近似可以认为是平面BE,因为分辨能力的缘故,这个景深区域D中的任意的双曲线上的任意的点(比如双曲线CE上的任意两点)不做区分,而是等同一个点,这非常的接近微积分的定义的概念了。
而正好ACEB可以近似为矩形,那么只需要做近似的线性变换a,就可以变成矩形了。
所以3维流形映射到2维流形也是这个原理。
但是这样成像看到的不还是没有立体感吗?都等同立起来了。
但这是完全清晰成像的景深,实际上呢?清晰度稍微下降一点dr,景深区域D前后还会变宽,设增宽为dw,依然在成像曲面S1上成像。这个时候的双曲线就要错开了如图所示:
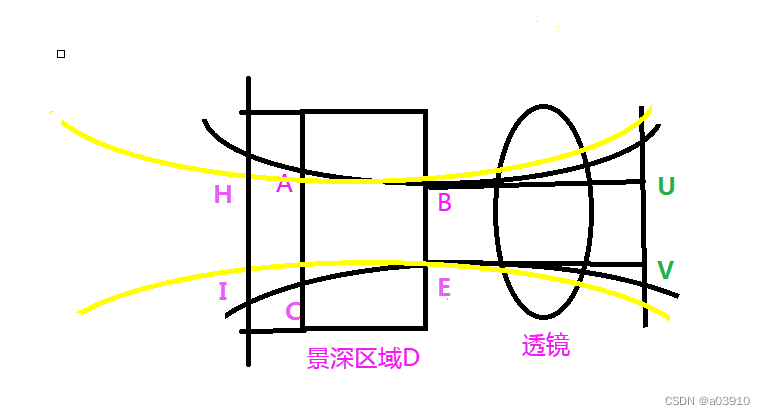
也可以近似的把HIEB看做是梯形HIEB, 用线性变换b缩小成矩形HIEB。但是HI不是和BE等同,而是和AC等同,这还是跟微积分的定义是一样的。HI是跟AC等同,不用管这个。所以HI不被BE挡住的部分就映射到UV上去了。这是清晰度下降dr之后的HI映射到UV,而之前的BE的映射到UV有两个像啊,这个是遮挡的关系,因为不在同一个双曲线上,意味着之后光程是不同的,那么映射到S1的点也不同,所以不是等同关系,而是遮挡关系。
遮挡关系产生了立体感。
这就是说在透镜左边的3维的物体区域W中,一切的等同操作都是做近似的线性变换的,这种小尺度的线性变换能使得成像平面UV和原来的3维的物体区域W有线性关系吗?
不知道,这里需要建立一个微分方程,草,难搞了。
。。。。。。。。不搞微分方程。。。。。。。。
以上是具体的过程了,我不做这个,就结束具体的方法了。
======================================================================
接着写一个不具体的成像原理。
之后怎么写呢?
简化问题,就是圆台内的物体变形成圆柱内的物体,然后投影(考虑遮挡关系)到UV平面上,这是一般的成像的说法。所以圆台内的直线形变之后还是直线吗?这是个线性变换,我给不出证明。
但是这个圆台的侧面的母线不是直线,而是双曲线,变形成圆柱体然后投影到UV平面上。这是个线性变换吗?这肯定不是线性变换,明显里面的直线会变成曲线,我也给不出证明。一般人都能写出来简化之后的直线变曲线的公式的思路,毕竟这个圆台的母线说了是双曲线,圆台变成圆柱感觉很简单,但是我还是觉得麻烦,不做这个。
所以,广角透镜畸变的解释极度简化的版本就是:照相机视野不是母线为直线的圆台,而是母线为双曲线的圆台,要收缩为圆柱状产生了畸变,就是这样的。(双曲线是根据清晰程度建立的,需要注意这一点,远处和近处的双曲线接近为直线,聚焦处最明显)

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









