







一、获取FreeRTOS源码和简单介绍
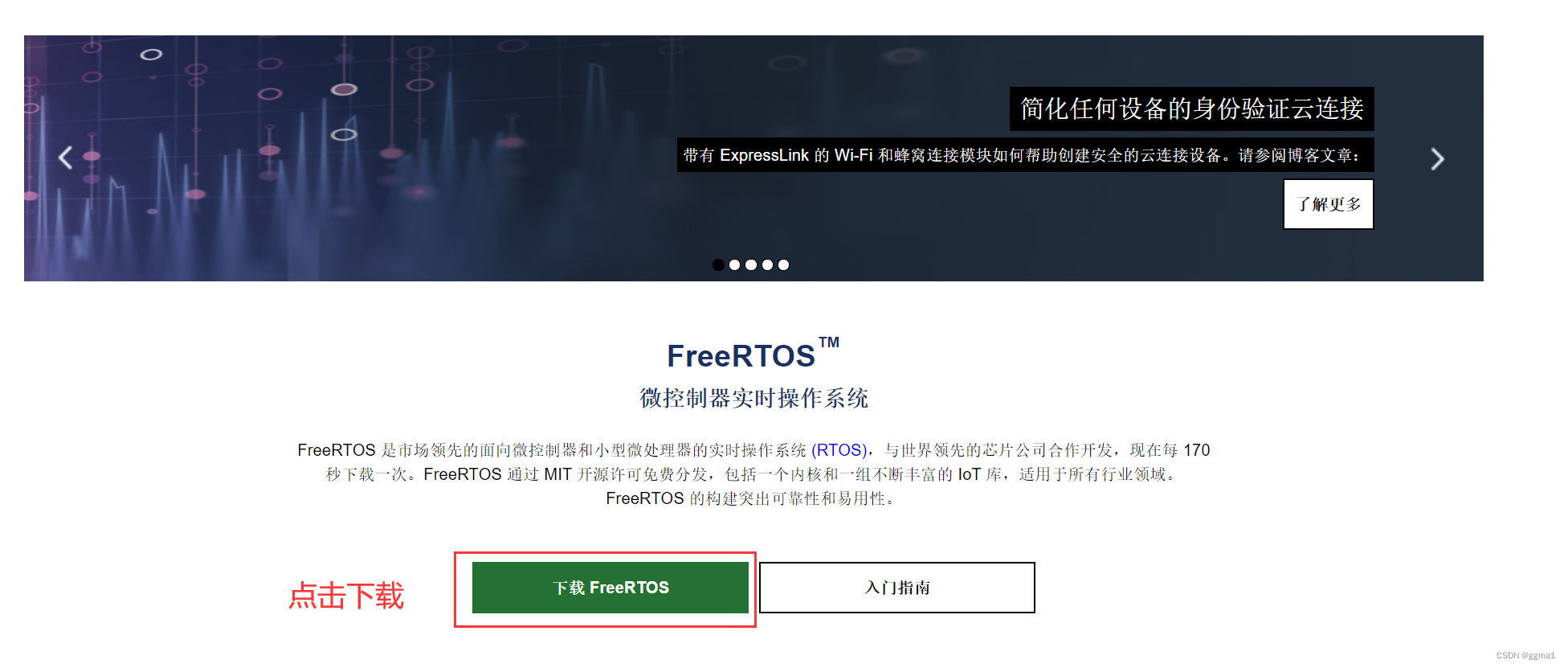
1、获取方式
打开FreeRTOS官网:FreeRTOS - Market leading RTOS (Real Time Operating System) for embedded systems with Internet of Things extensions
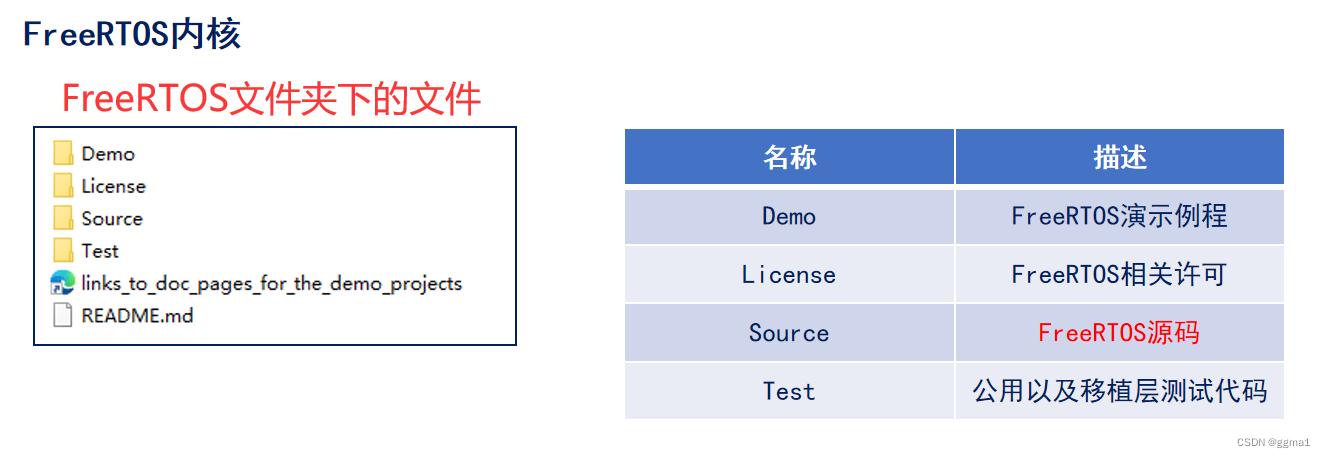
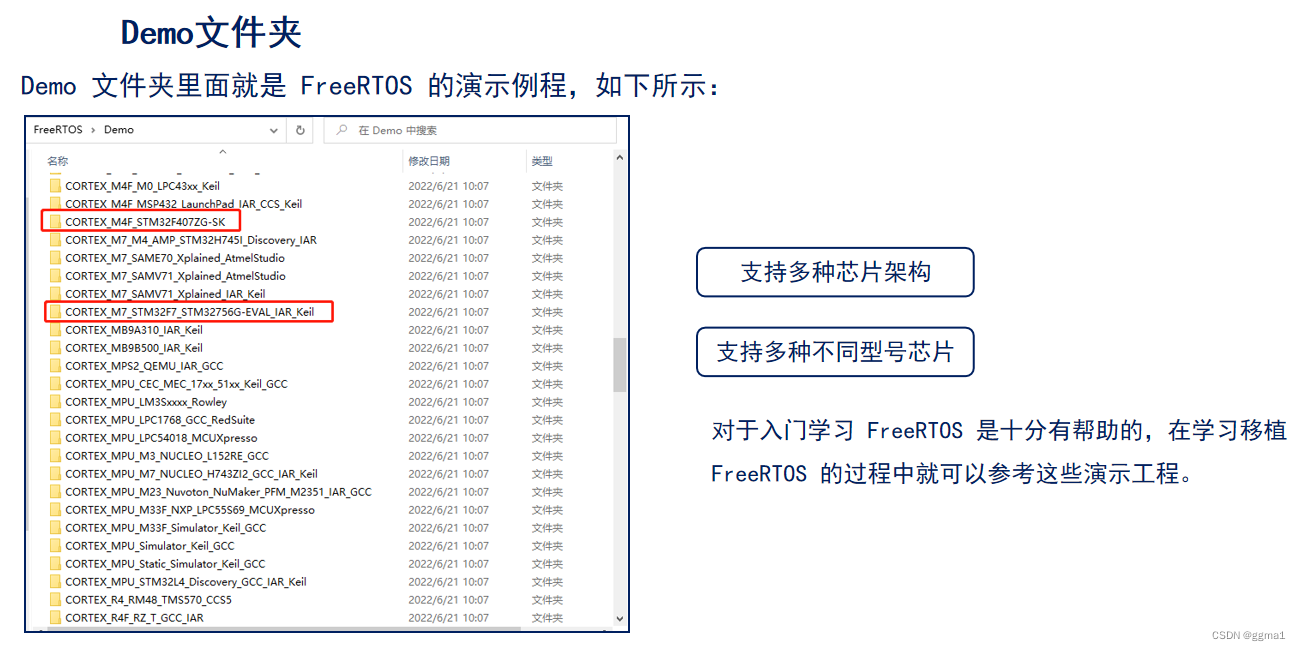
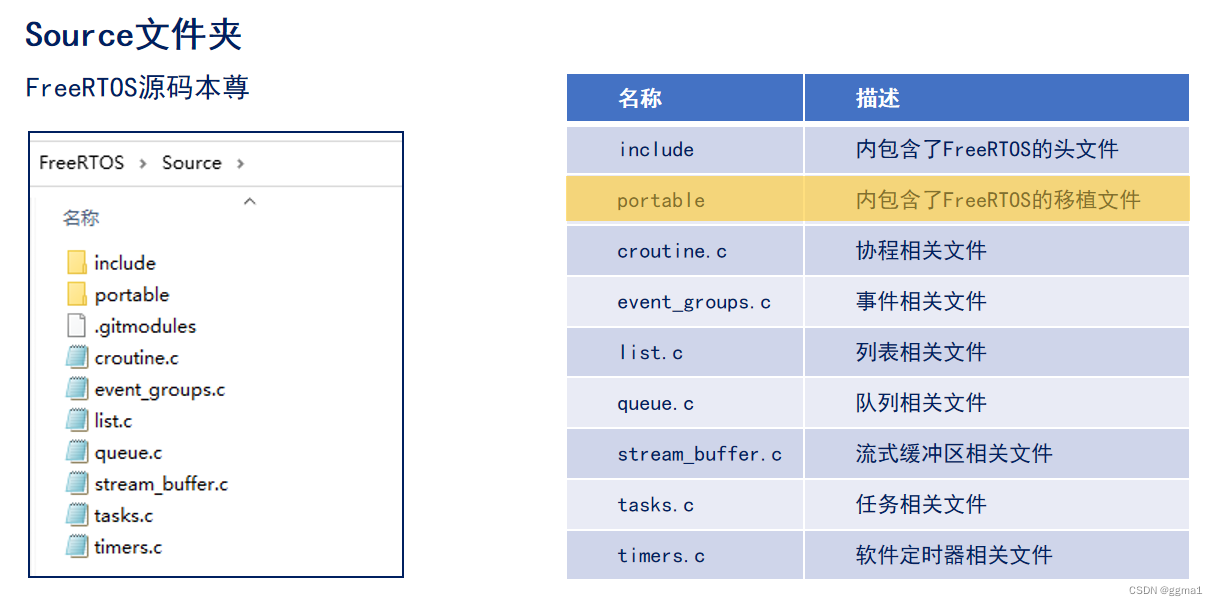
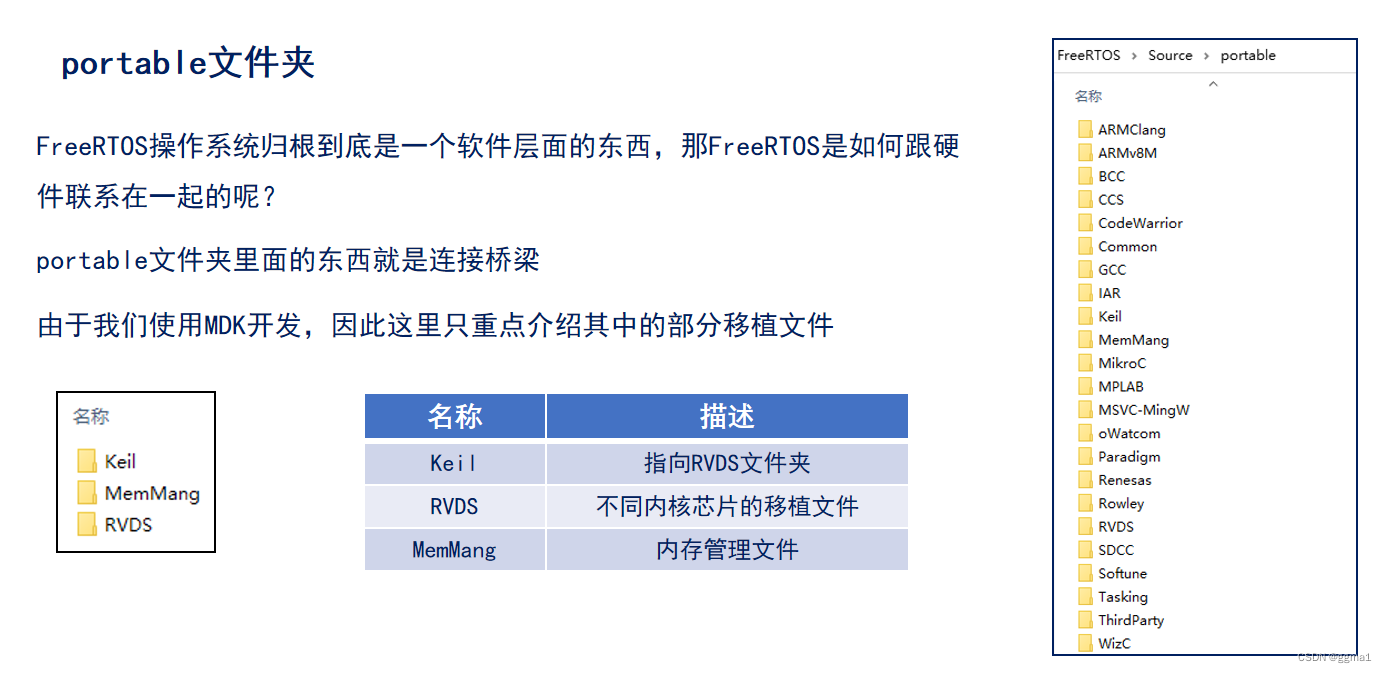
 2、FreeRTOS源码内容介绍
2、FreeRTOS源码内容介绍

二、FreeRTOS移植 (以F1内存管理实验为例)
移植步骤:
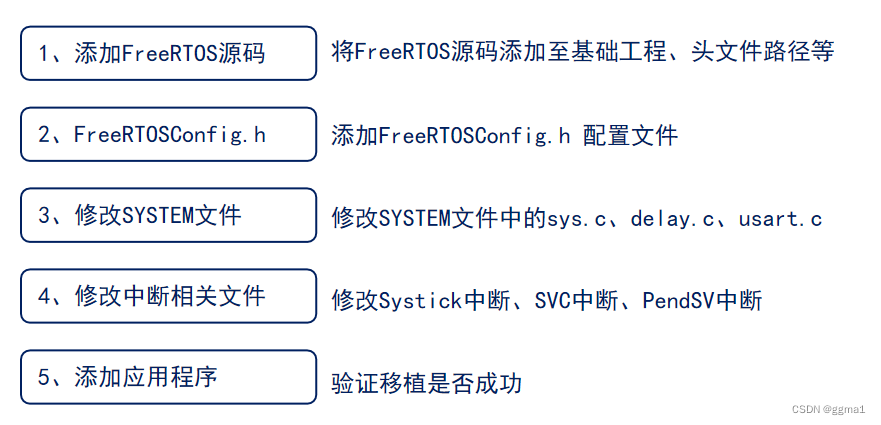
1、添加FreeRTOS源码
在基础工程的
Middlewares
文件夹中新建一个
FreeRTOS
子文件夹,如下图所示:

接着就需要将
FreeRTOS
的源代码添加到刚刚新建的
FreeRTOS
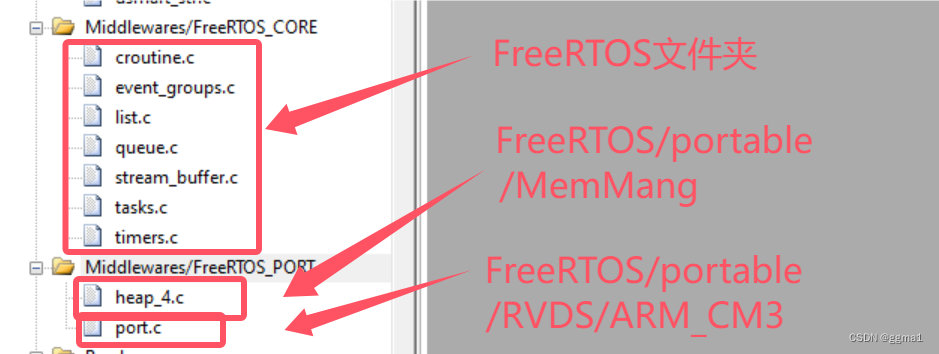
子文件中了。将
FreeRTOS
内核源码的
Source
文件夹下的所有文件(.c文件和文件夹)添加到工程的 FreeRTOS 文件夹中,如下图所示:
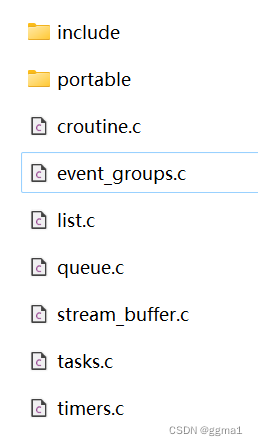
将portable文件夹下的多余文件删除,删除后如下图所示:

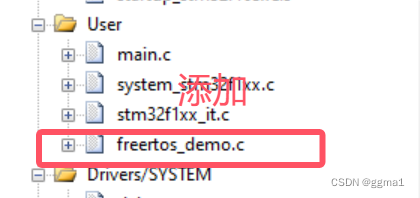
2、将文件添加到工程
在keil中新建分组如下图所示:
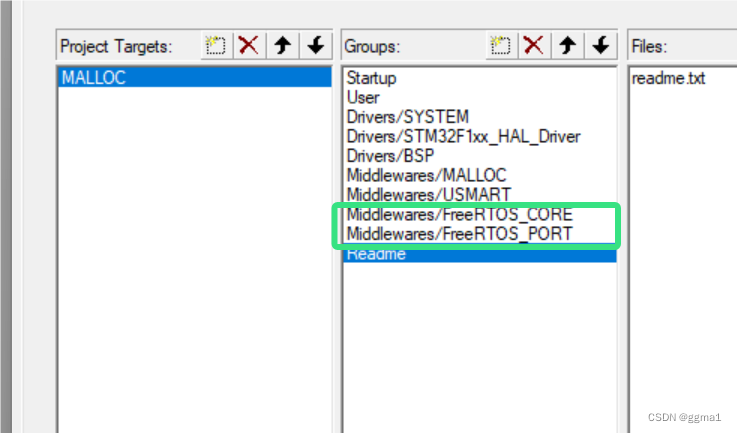
添加FreeRTOS源码如图所示:
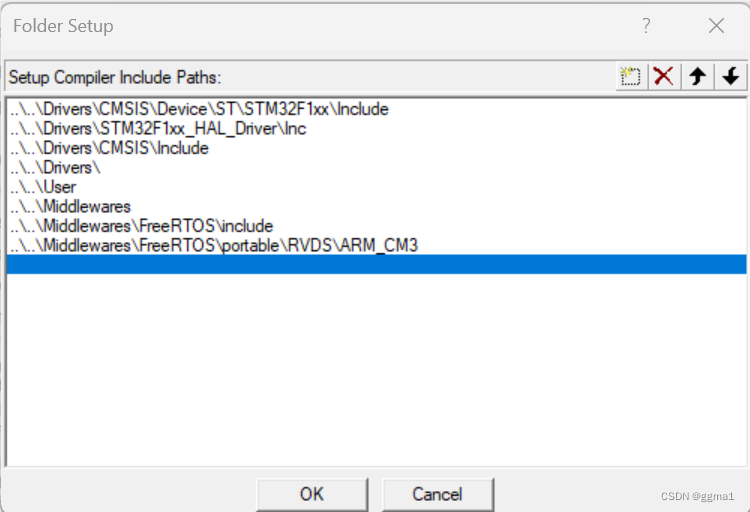
3、添加头文件路径
4、添加FreeRTOSConfig.h文件
在user文件中粘贴FreeRTOSConfig.h

5、修改文件
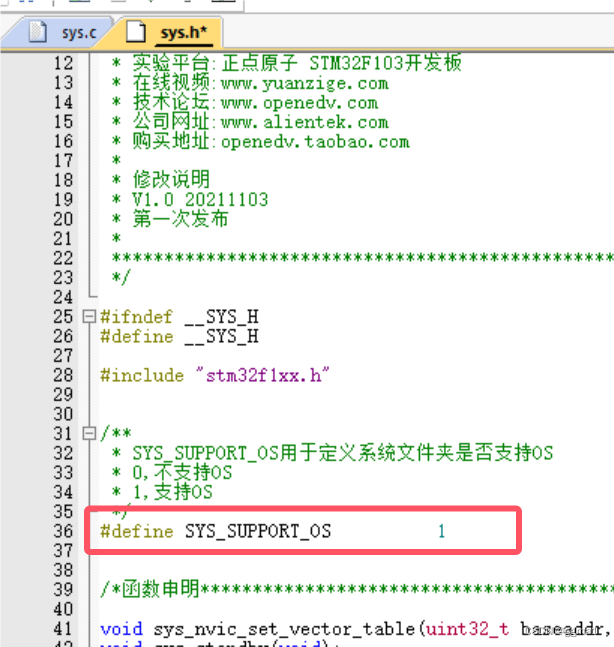
1.sys.h
将#define SYS_SUPPORT_OS 改位1
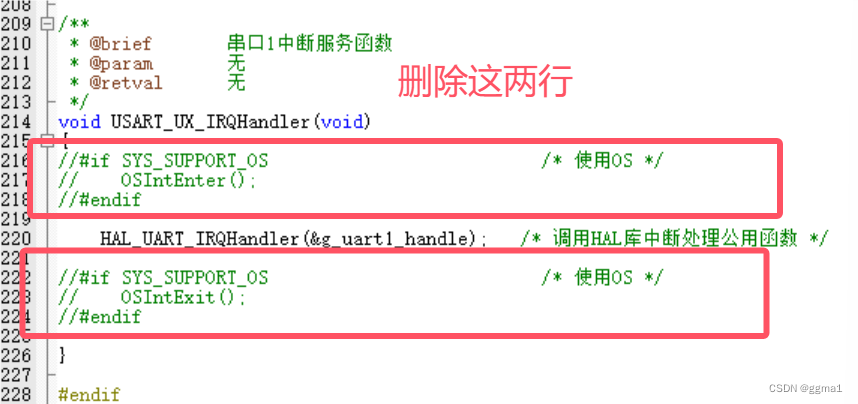
2.usart.c文件

3.delay.c文件
(1)删除:
/* 添加公共头文件 ( ucos需要用到) */
#include "os.h"
/* 定义 g_fac_ms 变量, 表示 ms 延时的倍乘数,
* 代表每个节拍的 ms 数, (仅在使能 os 的时候,需要用到)
*/
static uint16_t g_fac_ms = 0;
/*
* 当 delay_us/delay_ms 需要支持 OS 的时候需要三个与 OS 相关的宏定义和函数来支持
* 首先是 3 个宏定义:
* delay_osrunning :用于表示 OS 当前是否正在运行,以决定是否可以使用相关函数
* delay_ostickspersec :用于表示 OS 设定的时钟节拍,
* delay_init 将根据这个参数来初始化 systick
* delay_osintnesting :用于表示 OS 中断嵌套级别,因为中断里面不可以调度,
* delay_ms 使用该参数来决定如何运行
* 然后是 3 个函数:
* delay_osschedlock :用于锁定 OS 任务调度,禁止调度
* delay_osschedunlock :用于解锁 OS 任务调度,重新开启调度
* delay_ostimedly :用于 OS 延时,可以引起任务调度.
*
* 本例程仅作 UCOSII 和 UCOSIII 的支持,其他 OS,请自行参考着移植
*/
/* 支持 UCOSII */
#ifdef OS_CRITICAL_METHOD /* OS_CRITICAL_METHOD 定义了
* 说明要支持 UCOSII
*/
#define delay_osrunning OSRunning /* OS 是否运行标记,0,不运行;1,在运行 */
#define delay_ostickspersec OS_TICKS_PER_SEC /* OS 时钟节拍,即每秒调度次数 */
#define delay_osintnesting OSIntNesting /* 中断嵌套级别,即中断嵌套次数 */
#endif
/* 支持 UCOSIII */
#ifdef CPU_CFG_CRITICAL_METHOD /* CPU_CFG_CRITICAL_METHOD 定义了
* 说明要支持 UCOSIII
*/
#define delay_osrunning OSRunning /* OS 是否运行标记,0,不运行;1,在运行 */
#define delay_ostickspersec OSCfg_TickRate_Hz /* OS 时钟节拍,即每秒调度次数 */
#define delay_osintnesting OSIntNestingCtr /* 中断嵌套级别,即中断嵌套次数 */
#endif
/**
* @brief us 级延时时,关闭任务调度(防止打断 us 级延迟)
* @param 无
* @retval 无
*/
static void delay_osschedlock(void)
{
#ifdef CPU_CFG_CRITICAL_METHOD /* 使用 UCOSIII */
OS_ERR err;
OSSchedLock(&err); /* UCOSIII 的方式,禁止调度,防止打断 us 延时 */
#else /* 否则 UCOSII */
OSSchedLock(); /* UCOSII 的方式,禁止调度,防止打断 us 延时 */
#endif
}
/**
* @brief us 级延时时,恢复任务调度
* @param 无
* @retval 无
*/
static void delay_osschedunlock(void)
{
#ifdef CPU_CFG_CRITICAL_METHOD /* 使用 UCOSIII */
OS_ERR err;
OSSchedUnlock(&err); /* UCOSIII 的方式,恢复调度 */
#else /* 否则 UCOSII */
OSSchedUnlock(); /* UCOSII 的方式,恢复调度 */
#endif
}
/**
* @brief us 级延时时,恢复任务调度
* @param ticks: 延时的节拍数
* @retval 无
*/
static void delay_ostimedly(uint32_t ticks)
{
#ifdef CPU_CFG_CRITICAL_METHOD
OS_ERR err;
OSTimeDly(ticks, OS_OPT_TIME_PERIODIC, &err); /* UCOSIII 延时采用周期模式 */
#else
OSTimeDly(ticks); /* UCOSII 延时 */
#endif
}(2)添加:
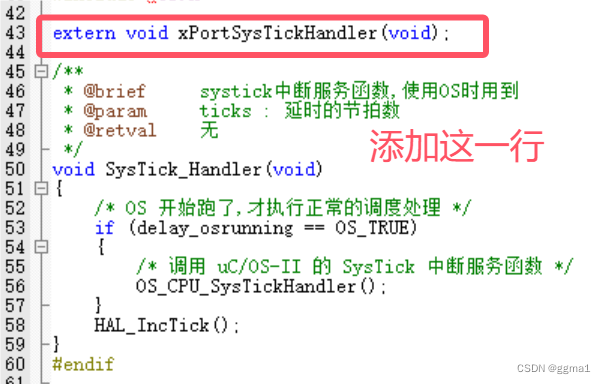
(3)修改部分内容:
需要修改的
4
个函数,分别是
SysTick_Handler()
、
delay_init()
、
delay_us()
和
delay_ms(),修改后分别如下:
void SysTick_Handler(void)
{
HAL_IncTick();
/* OS 开始跑了,才执行正常的调度处理 */
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
xPortSysTickHandler();
}
}void delay_init(uint16_t sysclk)
{
#if SYS_SUPPORT_OS /* 如果需要支持OS */
uint32_t reload;
#endif
SysTick->CTRL = 0;
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK_DIV8);
g_fac_us = sysclk / 8;
#if SYS_SUPPORT_OS
reload = sysclk / 8;
/* 使用 configTICK_RATE_HZ 计算重装载值
* configTICK_RATE_HZ 在 FreeRTOSConfig.h 中定义
*/
reload *= 1000000 / configTICK_RATE_HZ;
/* 删除不用的 g_fac_ms 相关代码 */
SysTick->CTRL |= 1 << 1;
SysTick->LOAD = reload;
SysTick->CTRL |= 1 << 0;
#endif
}void delay_us(uint32_t nus)
{
uint32_t ticks;
uint32_t told, tnow, tcnt = 0;
uint32_t reload = SysTick->LOAD; /* LOAD的值 */
ticks = nus * g_fac_us; /* 需要的节拍数 */
/* 删除适用于 μC/OS 用于锁定任务调度器的自定义函数 */
ticks = nus * g_fac_us;
told = SysTick->VAL;
while (1)
{
tnow = SysTick->VAL;
if (tnow != told)
{
if (tnow < told)
{
tcnt += told - tnow;
}
else
{
tcnt += reload - tnow + told;
}
told = tnow;
if (tcnt >= ticks)
{
break;
}
}
}
/* 删除适用于 μC/OS 用于解锁任务调度器的自定义函数 */
}void delay_ms(uint16_t nms)
{
uint32_t i;
for (i=0; i<nms; i++)
{
delay_us(1000);
}
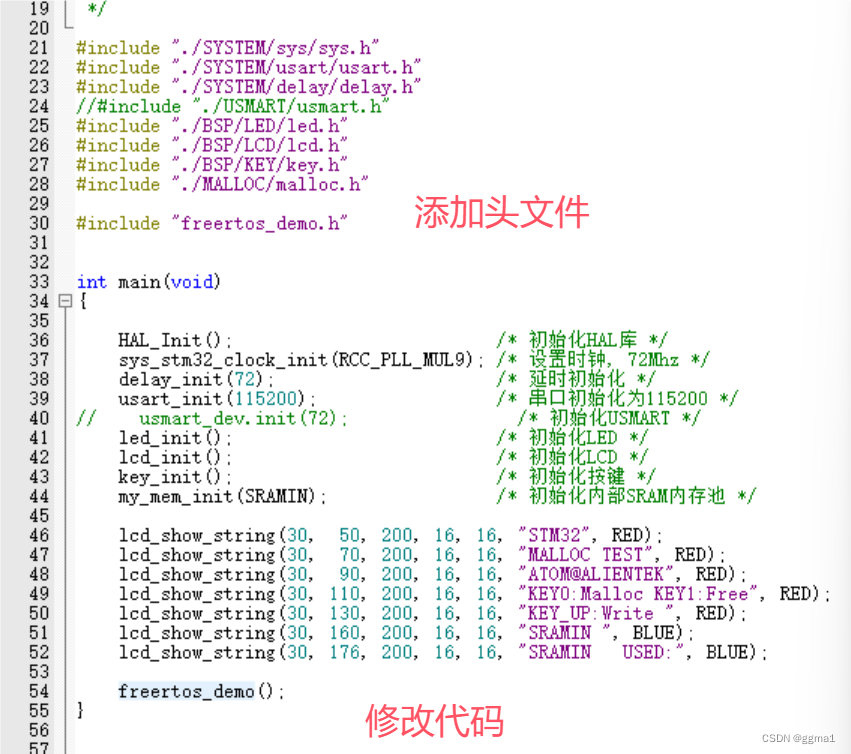
}(4)包含头文件
/* 添加公共头文件 (FreeRTOS 需要用到) */
#include "FreeRTOS.h"
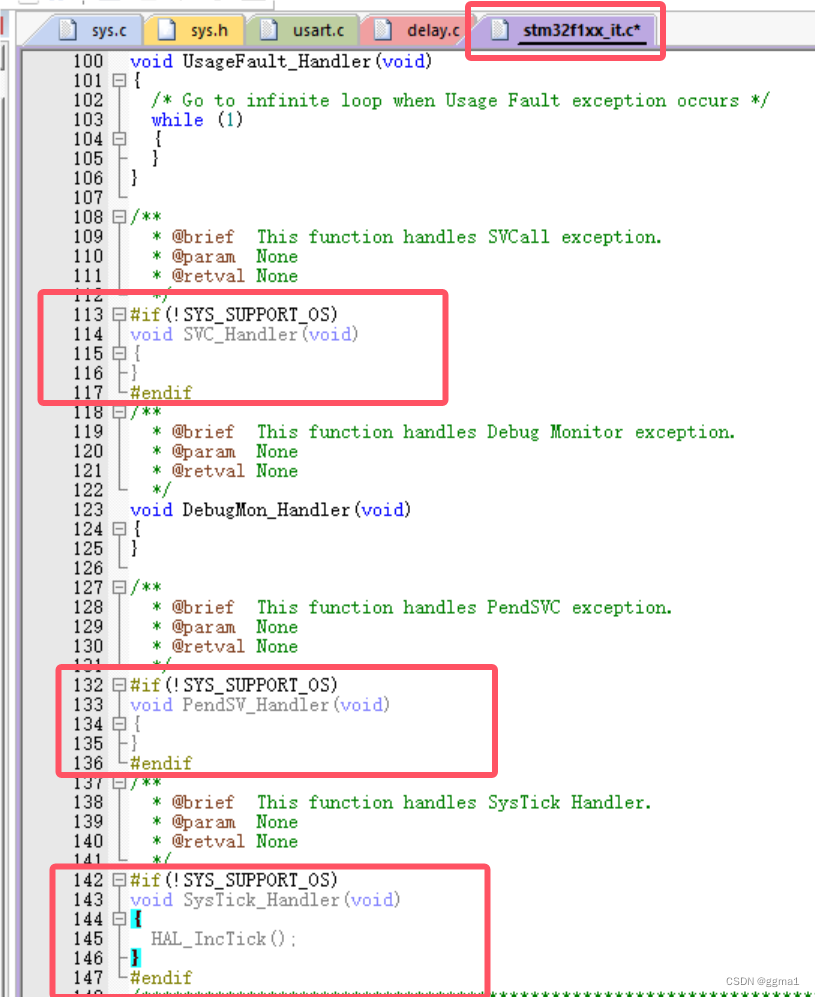
#include "task.h"4.修改中断相关文件
 6、修改工程名称
6、修改工程名称

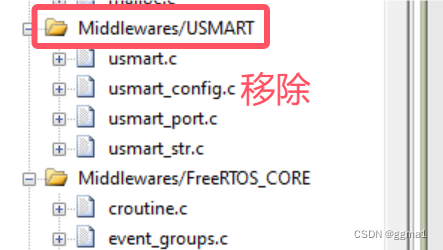
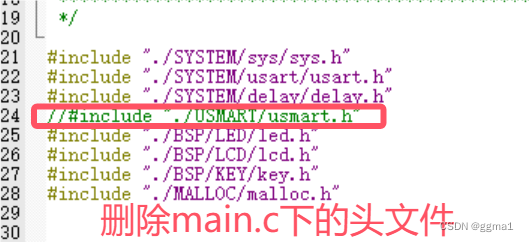
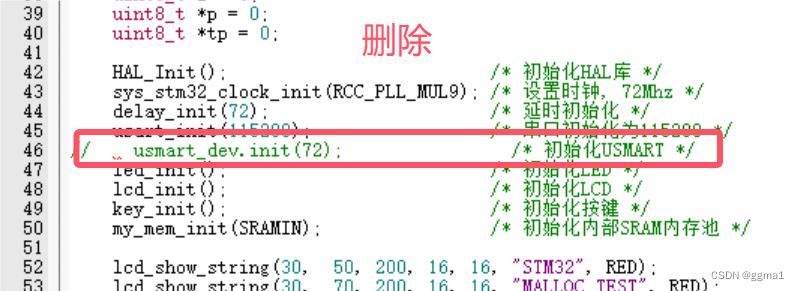
7、移除USMART
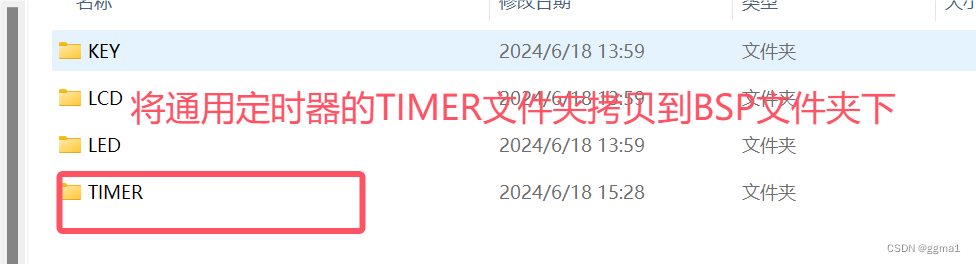
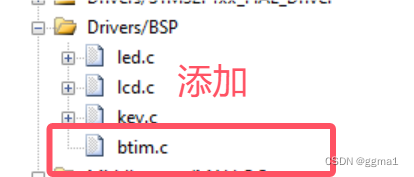
8、添加定时器驱动
9、验证
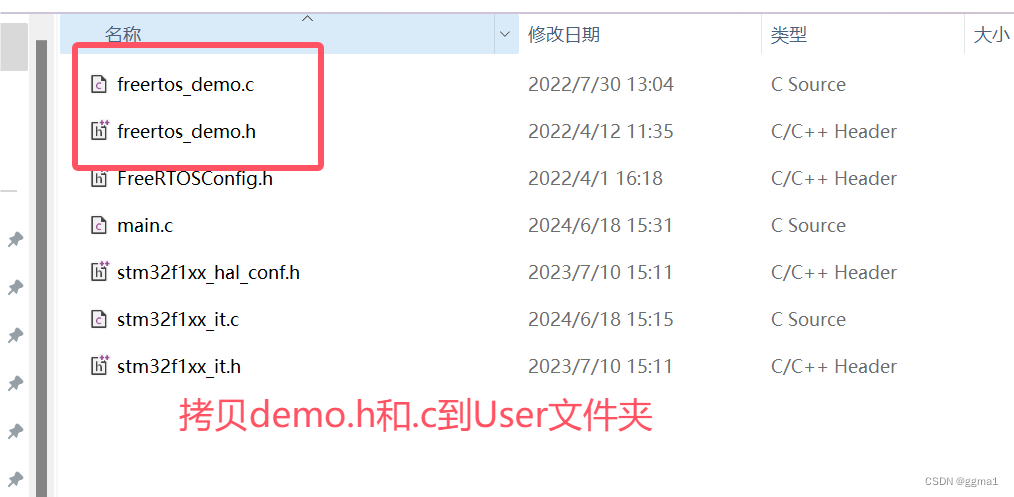
 demo.c代码:
demo.c代码:
#include "freertos_demo.h"
#include "./SYSTEM/usart/usart.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./BSP/KEY/key.h"
/*FreeRTOS*********************************************************************************************/
#include "FreeRTOS.h"
#include "task.h"
/******************************************************************************************************/
/*FreeRTOS配置*/
/* START_TASK 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define START_TASK_PRIO 1
#define START_TASK_STACK_SIZE 128
TaskHandle_t start_task_handler;
void start_task( void * pvParameters );
/* TASK1 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK1_PRIO 2
#define TASK1_STACK_SIZE 128
TaskHandle_t task1_handler;
void task1( void * pvParameters );
/* TASK2 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK2_PRIO 3
#define TASK2_STACK_SIZE 128
TaskHandle_t task2_handler;
void task2( void * pvParameters );
/* TASK3 任务 配置
* 包括: 任务句柄 任务优先级 堆栈大小 创建任务
*/
#define TASK3_PRIO 4
#define TASK3_STACK_SIZE 128
TaskHandle_t task3_handler;
void task3( void * pvParameters );
/******************************************************************************************************/
/**
* @brief FreeRTOS例程入口函数
* @param 无
* @retval 无
*/
void freertos_demo(void)
{
xTaskCreate((TaskFunction_t ) start_task,
(char * ) "start_task",
(configSTACK_DEPTH_TYPE ) START_TASK_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) START_TASK_PRIO,
(TaskHandle_t * ) &start_task_handler );
vTaskStartScheduler();
}
void start_task( void * pvParameters )
{
taskENTER_CRITICAL(); /* 进入临界区 */
xTaskCreate((TaskFunction_t ) task1,
(char * ) "task1",
(configSTACK_DEPTH_TYPE ) TASK1_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK1_PRIO,
(TaskHandle_t * ) &task1_handler );
xTaskCreate((TaskFunction_t ) task2,
(char * ) "task2",
(configSTACK_DEPTH_TYPE ) TASK2_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK2_PRIO,
(TaskHandle_t * ) &task2_handler );
xTaskCreate((TaskFunction_t ) task3,
(char * ) "task3",
(configSTACK_DEPTH_TYPE ) TASK3_STACK_SIZE,
(void * ) NULL,
(UBaseType_t ) TASK3_PRIO,
(TaskHandle_t * ) &task3_handler );
vTaskDelete(NULL);
taskEXIT_CRITICAL(); /* 退出临界区 */
}
/* 任务一,实现LED0每500ms翻转一次 */
void task1( void * pvParameters )
{
while(1)
{
printf("task1正在运行!!!\r\n");
LED0_TOGGLE();
vTaskDelay(1000);
}
}
/* 任务二,实现LED1每500ms翻转一次 */
void task2( void * pvParameters )
{
while(1)
{
printf("task2正在运行!!!\r\n");
LED1_TOGGLE();
vTaskDelay(500);
}
}
/* 任务三,判断按键KEY0,按下KEY0删除task1 */
void task3( void * pvParameters )
{
uint8_t key = 0;
while(1)
{
printf("task3正在运行!!!\r\n");
key = key_scan(0);
if(key == KEY0_PRES)
{
if(task1_handler != NULL)
{
printf("删除task1任务\r\n");
vTaskDelete(task1_handler);
task1_handler = NULL;
}
}
vTaskDelay(10);
}
}















 1140
1140











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









