







 本文是作者关于三维点云目标识别的总结,主要探讨了该技术在智能驾驶和三维重建领域的应用,适合刚接触该领域的研究生阅读。作者分享了其在研究生期间的研究成果和经验。
本文是作者关于三维点云目标识别的总结,主要探讨了该技术在智能驾驶和三维重建领域的应用,适合刚接触该领域的研究生阅读。作者分享了其在研究生期间的研究成果和经验。
三维点云目标提取
1.前言
不知不觉,已经到了研究生的第三年了,明年就要毕业参加工作了,offer拿了几个,基本的工作也差不多定下来了,毕竟研究生两年时间主要研究方向是三维点云的目标识别及三维重建(姑且认为是研究方向吧),正如国内的研究生境遇一样,几年的光辉时间都奉献给了导师的几个项目,做的东西也毕竟杂,精通的技能也谈不上,乘着要毕业的时节,现奉献一下鄙人对三维点云目标识别的一些看法(应该只适合给刚接触搞三维点云的小硕们看,不过貌似国内搞这一块的高校也不是很多啊)。
2.三维激光点云应用领域
三维激光点云的获取原理以及基本特征就不介绍了,比较涉及到比较专业的知识,就谈谈三维激光点云的应用吧。
个人觉得,三维激光的应用前景是非常广的,特别是与其他传感器结合起来,如图像传感器等。应用领域包括但不限于:智能驾驶,智能家居,三维重建,数字地球,城市规划,防灾减灾,海洋测绘等等。只讨论两个例子:智能驾驶以及三维重建。
2.1智能驾驶
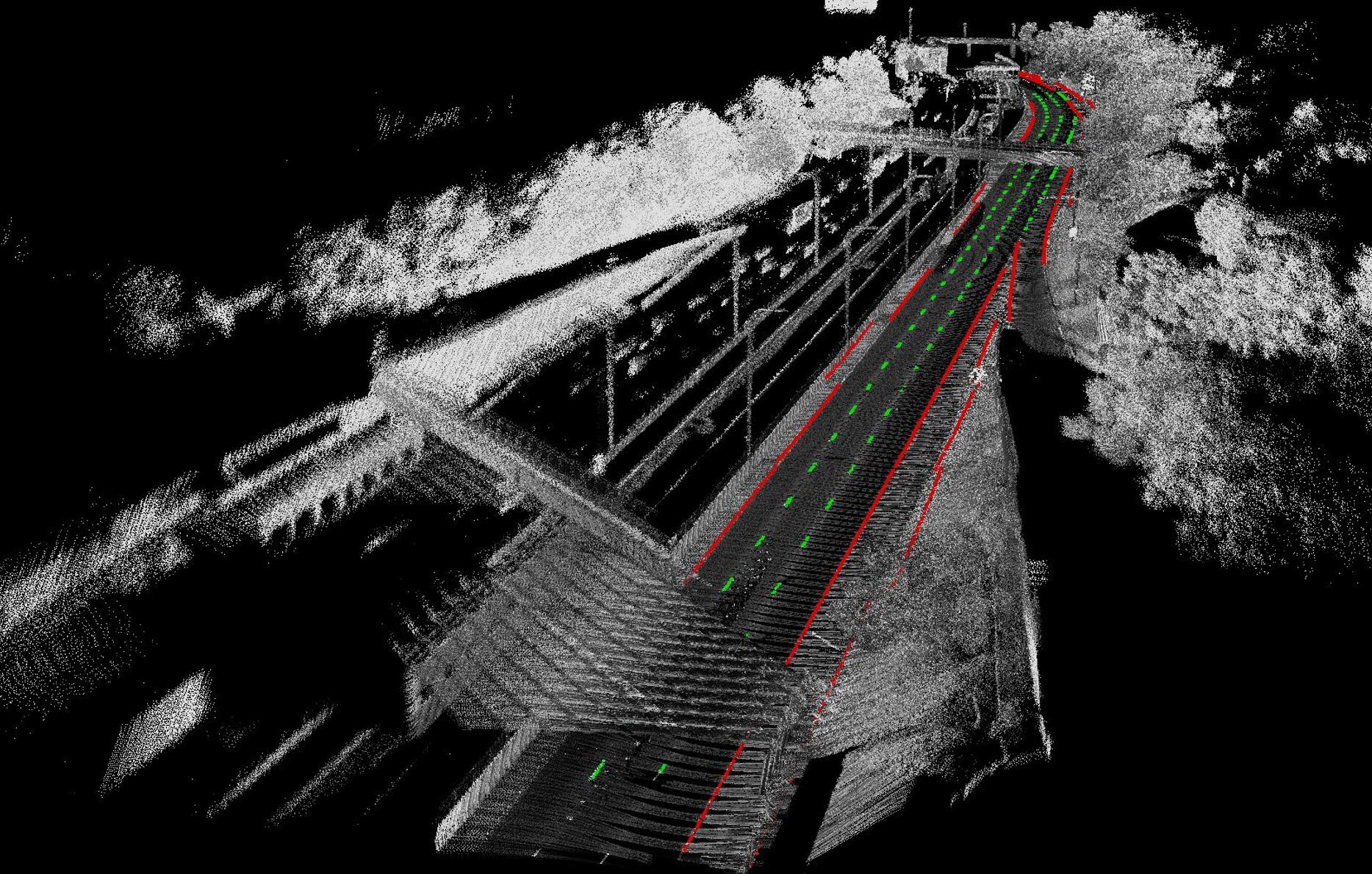
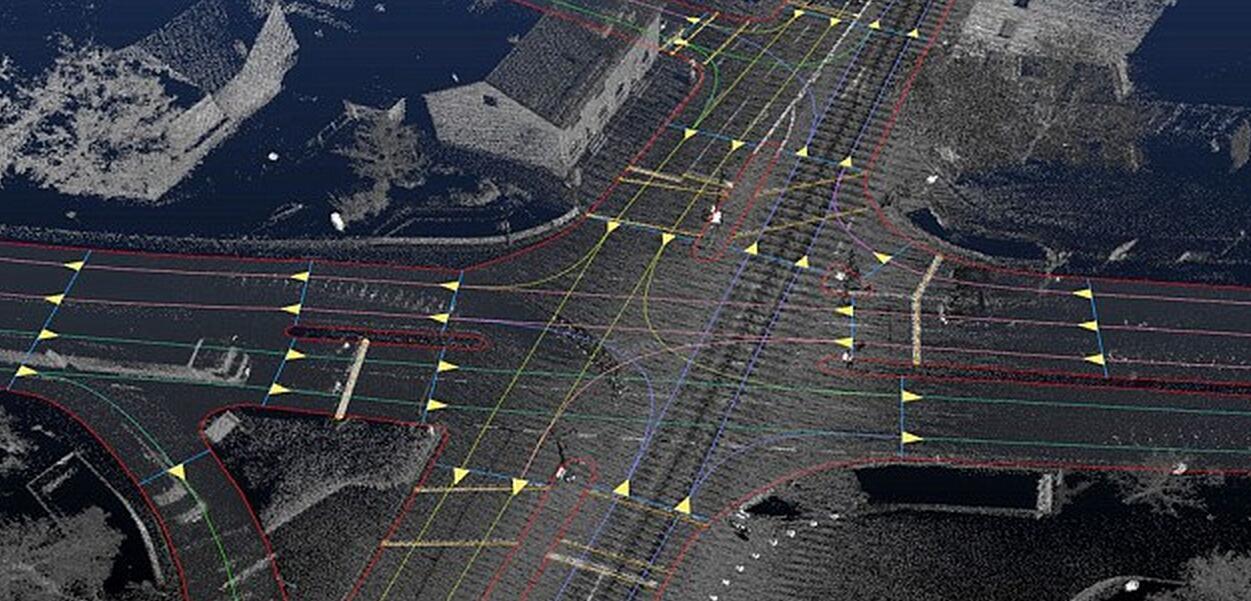
智能驾驶是需要高精
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1897
1897

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









