






1.研究背景
图像分割是计算机视觉领域的基础任务也是经典难题。近年来随着深度学习的快速发展,人像分割在医疗保健领域得到了广泛的应用,通过人像分割获取人体身高体长比例,从而指导人体肥胖程度。
然而,现有分割方法的网络模型具有巨大的参数量和计算量,急需一种轻量化的人像精细化分割网络。 本文通过对现有的图像分割算法、轻量化网络设计方法以及图像边缘优化算法进行研究,提出了快速自动化人像分割网络以及边缘精细化处理方法,主要工作内容和成果如下:(1)在基于编码解码结构的U-Net网络上进行改进,提出了一种快速自动化人像分割网络。为平衡网络获取语义信息和空间信息,本文在U-Net的基础上通过增加一次降采样操作,增大卷积神经网络的感受野来获得更多的语义信息。为提高网络分割效率,本文引入了深度可分离卷积,同时采用特征相加的方式取代特征堆叠,进行网络中深层特征和浅层特征的融合。最后为提高网络分割精度同时防止网络加深造成梯度消失,本文设计了一个轻量残差块结构,完成了人像的初步分割。 (2)提出了一种人像边缘精细处理方法。在轻量化人像分割网络对人像图片进行处理后,针对分割结果边缘不够精细的问题,本文对边缘优化方法进行研究,在引导滤波算法的基础上,采用深度学习方式,通过训练得到一个针对人像分割任务的滤波器。同时针对边缘像素,本文采用边缘注意力损失函数与图像结构损失函数,进一步对分割边缘进行精细化处理。最后在EG1800、Supervise.ly以及百度数据集上验证了其有效性。 (3)本文设计并实现了自动化人像处理系统,该系统包括界面模块、数据处理模块、算法模块和文件模块。系统操作简便,界面简洁大方。用户选择一张人像图片后可选择人像分割、人像素描和背景替换等功能来对图片进行处理。最后可将处理好的图片保存到本地。
2.图片效果展示

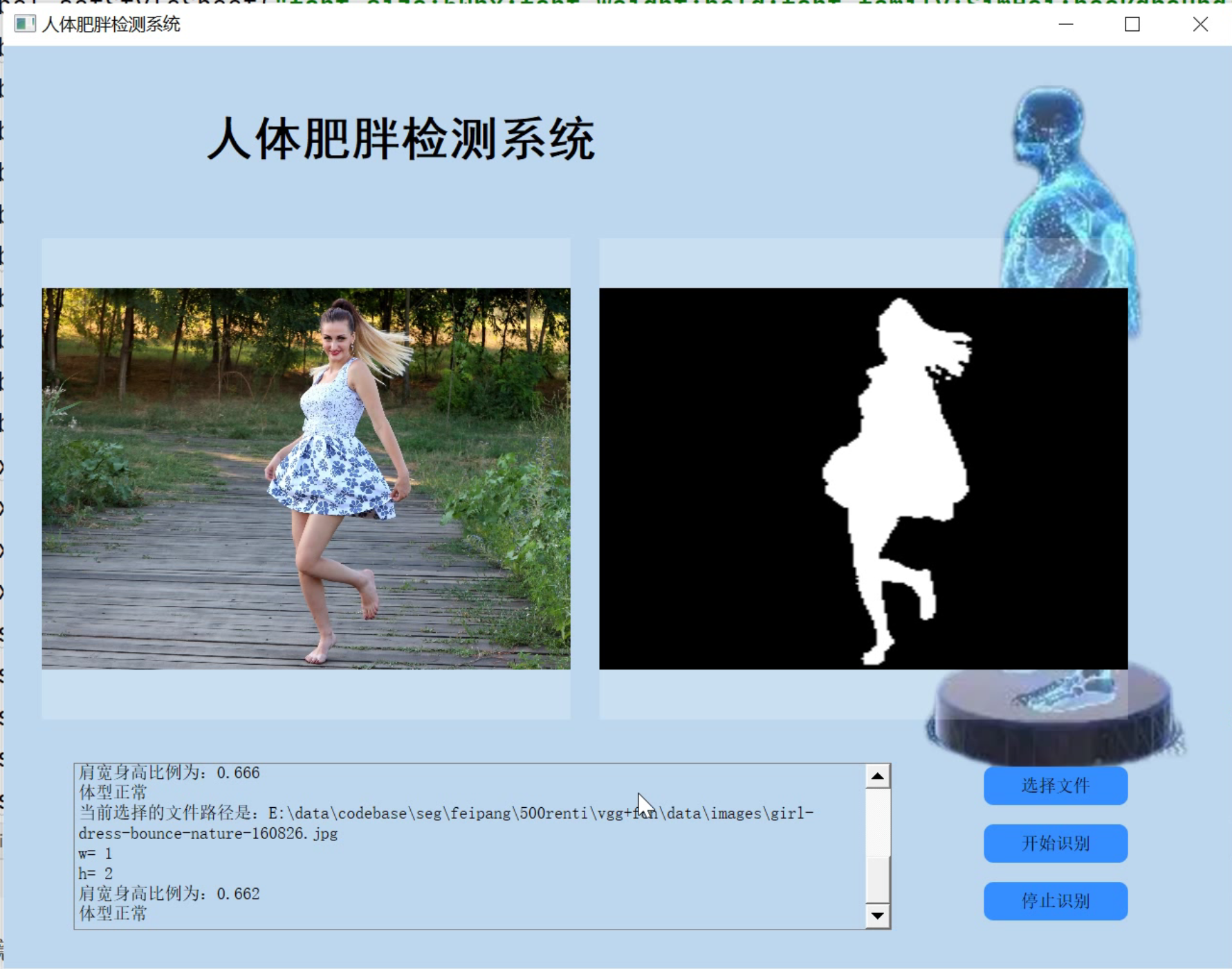
3.视频效果演示
基于改进FCN&VGG人体图像分割肥胖程度检测(源码&教程)_哔哩哔哩_bilibili
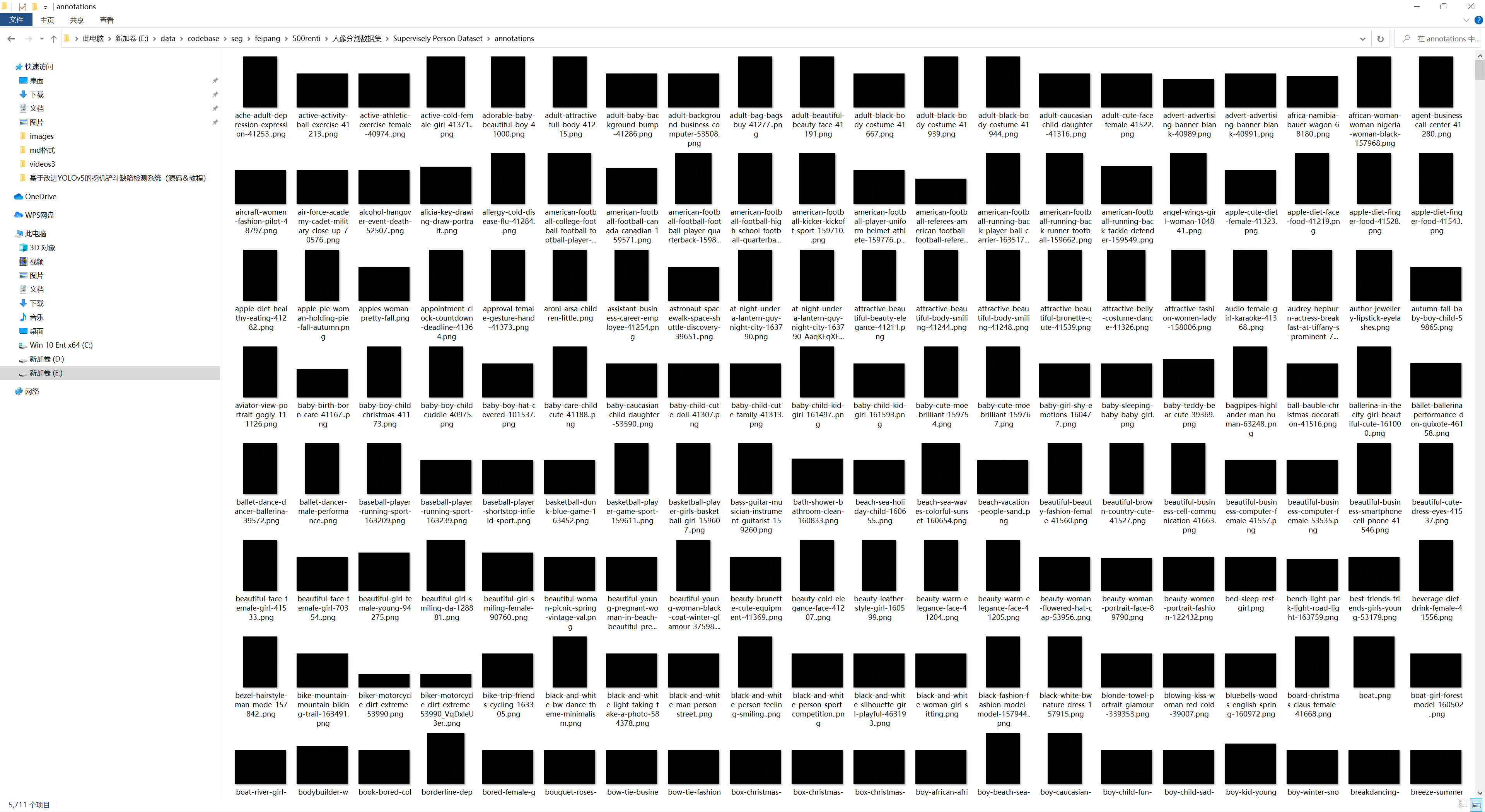
4.人像分割数据集(5000张,文末下载)

5.改进FCN网络
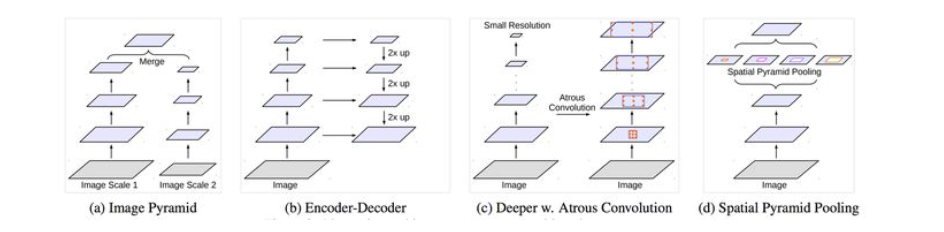
在处理多尺度物体分割时,我们通常会有以下几种方式来操作:((d)为DeepLabV2的图)
然而仅仅(在一个卷积分支网络下)使用 dilated convolution 去抓取多尺度物体是一个不正统的方法。比方说,我们用一个 HDC 的方法来获取一个大(近)车辆的信息,然而对于一个小(远)车辆的信息都不再受用。假设我们再去用小 dilated convolution 的方法重新获取小车辆的信息,则这么做非常的冗余。
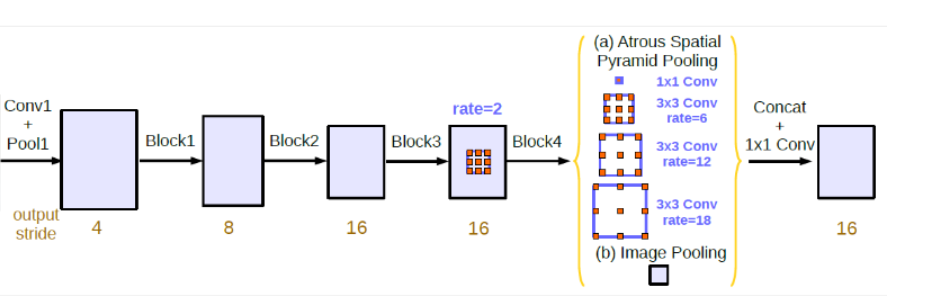
基于港中文和商汤组的 PSPNet 里的 Pooling module (其网络同样获得当年的SOTA结果),ASPP 则在网络 decoder 上对于不同尺度上用不同大小的 dilation rate 来抓去多尺度信息,每个尺度则为一个独立的分支,在网络最后把他合并起来再接一个卷积层输出预测 label。这样的设计则有效避免了在 encoder 上冗余的信息的获取,直接关注与物体之间之内的相关性。
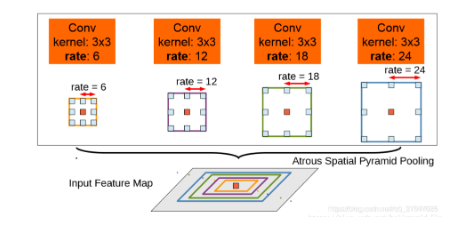
deeplabv2中的aspp如上图所示,在特征顶部映射图使用了四中不同采样率的空洞卷积。这表明以不同尺度采样时有效的,在Deeolabv3中向ASPP中添加了BN层。不同采样率的空洞卷积可以有效捕获多尺度信息,但会发现随着采样率的增加,滤波器有效权重(权重有效的应用在特征区域,而不是填充0)逐渐变小。
代码实现
class ASPP(nn.Module):
def __init__(self, in_channel=512, depth=256):
super(ASPP,self).__init__()
# global average pooling : init nn.AdaptiveAvgPool2d ;also forward torch.mean(,,keep_dim=True)
self.mean = nn.AdaptiveAvgPool2d((1, 1))
self.conv = nn.Conv2d(in_channel, depth, 1, 1)
# k=1 s=1 no pad
self.atrous_block1 = nn.Conv2d(in_channel, depth, 1, 1)
self.atrous_block6 = nn.Conv2d(in_channel, depth, 3, 1, padding=6, dilation=6)
self.atrous_block12 = nn.Conv2d(in_channel, depth, 3, 1, padding=12, dilation=12)
self.atrous_block18 = nn.Conv2d(in_channel, depth, 3, 1, padding=18, dilation=18)
self.conv_1x1_output = nn.Conv2d(depth * 5, depth, 1, 1)
def forward(self, x):
size = x.shape[2:]
image_features = self.mean(x)
image_features = self.conv(image_features)
image_features = F.upsample(image_features, size=size, mode='bilinear')
atrous_block1 = self.atrous_block1(x)
atrous_block6 = self.atrous_block6(x)
atrous_block12 = self.atrous_block12(x)
atrous_block18 = self.atrous_block18(x)
net = self.conv_1x1_output(torch.cat([image_features, atrous_block1, atrous_block6,
atrous_block12, atrous_block18], dim=1))
return net
6.改进VGG
VGG 是 Visual Geometry Group 的缩写,是这个网络创建者的队名,作者来自牛津大学。
VGG 最大的特点就是它在之前的网络模型上,通过比较彻底地采用 3x3 尺寸的卷积核来堆叠神经网络,从而加深整个神经网络的层级。
3x3 卷积核是能够感受到上下、左右、重点的最小的感受野尺寸。
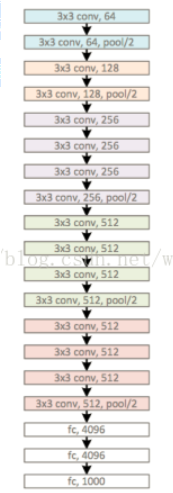
一、使用了更小的33卷积核,和更深的网络。两个33卷积核的堆叠相对于55卷积核的视野,三个33卷积核的堆叠相当于77卷积核的视野。这样一方面可以有更少的参数(3个堆叠的33结构只有77结构参数数量的(333)/(77)=55%);另一方面拥有更多的非线性变换,增加了CNN对特征的学习能力。
二、在VGGNet的卷积结构中,引入1*1的卷积核,在不影响输入输出维度的情况下,引入非线性变换,增加网络的表达能力,降低计算量。
代码实现
import torch.nn as nn
import torch
class VGG(nn.Module):
def __init__(self, features, num_classes=1000, init_weights=False):
super(VGG, self).__init__()
self.features = features
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(512 * 7 * 7, 2048),
nn.ReLU(True),
nn.Dropout(p=0.5),
nn.Linear(2048, 2048),
nn.ReLU(True),
nn.Linear(2048, num_classes)
)
if init_weights:
self._initialize_weights()
def forward(self, x):
# N x 3 x 224 x 224
x = self.features(x)
# N x 512 x 7 x 7
x = torch.flatten(x, start_dim=1)
# N x 512*7*7
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
nn.init.xavier_uniform_(m.weight) # 初始化权重参数
if m.bias is not None: # 如果采用了偏置的话,置为0
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.xavier_uniform_(m.weight)
# nn.init.normal_(m.weight, 0, 0.01)
nn.init.constant_(m.bias, 0)
def make_features(cfg: list): # 注意这里是 用一个函数把卷积层和池化层堆叠到layers中
layers = []
in_channels = 3
for v in cfg:
if v == "M":
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
layers += [conv2d, nn.ReLU(True)]
in_channels = v
return nn.Sequential(*layers)
cfgs = {
'vgg11': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'vgg13': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'vgg16': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'vgg19': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'],
}
def vgg(model_name="vgg16", **kwargs):
try:
cfg = cfgs[model_name]
except:
print("Warning: model number {} not in cfgs dict!".format(model_name))
exit(-1)
model = VGG(make_features(cfg), **kwargs)
return model
7.环境配置
tensorflow-gpu2.3.0
numpy1.21.5
matplotlib==3.5.1
8. 创建数据集路径索引文件
项目根目录下的"./prepare_dataset"目录下有三个文件:drive.py,stare.py和chasedb1.py。分别将三个文件中的“data_root_path”参数赋值为上述3.2准备好的数据集的绝对路径(例如: data_root_path=“/home/lee/datasets”)。然后分别运行:
python ./prepare_dataset/drive.py
python ./prepare_dataset/stare.py
python ./prepare_dataset/chasedb1.py
即可在"./prepare_dataset/data_path_list"目录下对应的数据集文件夹中生成"train.txt"和"test.txt"文件,分别存储了用于训练和测试的数据路径(每行依次存储原图,标签和FOV路径(用空格隔开))。
9.训练模型
在根目录下的"config.py"文件中修改超参数以及其他配置信息。特别要注意 “train_data_path_list"和"test_data_path_list"这两个参数,分别指向3.3中创建的某一个数据集的"train.txt"和"text.txt"。 在"train.py"中构造创建好的模型(所有模型都在"./models"内手撕),例如指定UNet模型:
net = models.UNetFamily.U_Net(1,2).to(device) # line 103 in train.py
修改完成后,在项目根目录执行:
CUDA_VISIBLE_DEVICES=1 python train.py --save UNet_vessel_seg --batch_size 64
上述命令将在1号GPU上执行训练程序,训练结果保存在“ ./experiments/UNet_vessel_seg”文件夹中,batchsize取64,其余参数取config.py中的默认参数。
可以在config中配置培训信息,也可以用命令行修改配置参数。训练结果将保存到“ ./experiments”文件夹中的相应目录(保存目录的名称用参数"–save"指定)。
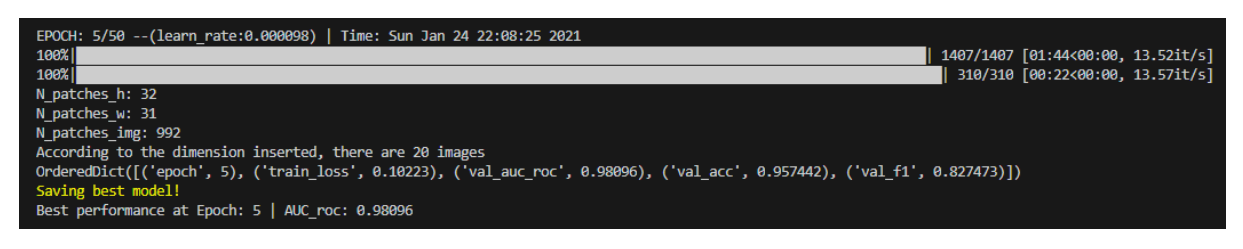
此外,需要注意一点,config文件中有个“val_on_test”参数。当其为真时表示会在训练的每个epoch结束后在测试集上进行性能评估,并选取"AUC of ROC"最高的模型保存为“best_model.pth”;当其为假时,会用验证集性能评估结果(AUC of ROC)保存模型。当然保存最佳模型依据的指标可以自行修改,默认为AUC of ROC。
10.测试评估
在“test.py”文件中构造对应的模型(同上),例如指定UNet模型:
net = models.UNetFamily.U_Net(1,2).to(device)
测试过程也需要"./config.py"中的相关参数,也可以在运行时通过命令行参数修改。
然后运行:
CUDA_VISIBLE_DEVICES=1 python test.py --save UNet_vessel_seg
上述命令将训练好的“./experiments /UNet_vessel_seg/best_model.pth”参数加载到相应的模型,并在测试集上进行性能测试,其测试性能指标结果保存在同一文件夹中的"performance.txt"中,同时会绘制相应的可视化结果。
11.系统整合:
下图源码&环境部署视频教程&数据集
参考博客《基于改进FCN&VGG人体图像分割肥胖程度检测(源码&教程)》
12.参考文献
[1]张宁.非真实感渲染生成风格化图像的方法[J].信息技术.2012,(11).19-21.DOI:10.3969/j.issn.1009-2552.2012.11.006.
[2]孙志军,薛磊,许阳明,等.深度学习研究综述[D].2012
[3]Chen, Liang-Chieh,Papandreou, George,Kokkinos, Iasonas,等.DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs.[J].IEEE Transactions on Pattern Analysis & Machine Intelligence.2018,40(4).834-848.
[4]Ren, Shaoqing,He, Kaiming,Girshick, Ross,等.Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.2017,39(6).1137-1149.DOI:10.1109/TPAMI.2016.2577031.
[5]Vijay Badrinarayanan,Alex Kendall,Roberto Cipolla.SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.2017,39(12).2481-2495.
[6]Shelhamer, Evan,Long, Jonathan,Darrell, Trevor.Fully Convolutional Networks for Semantic Segmentation[J].IEEE Transactions on Pattern Analysis & Machine Intelligence.2017,39(6).640-651.
[7]Xiaoyong Shen,Aaron Hertzmann,Jiaya Jia,等.Automatic Portrait Segmentation for Image Stylization[J].Computer Graphics Forum.2016,35(2).93-102.DOI:10.1111/cgf.12814.
[8]He, Kaiming,Sun, Jian,Tang, Xiaoou.Guided Image Filtering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.2013,35(6).1397-1409.
[9]Rafferty Janice,Shellito Paul,Hyman Neil H.,等.Practice Parameters for Sigmoid Diverticulitis[J].Diseases of the Colon & Rectum.2006,49(7).939-944.DOI:10.1007/s10350-006-0578-2.
[10]Aly H.A.,Dubois E…Image up-sampling using total-variation regularization with a new observation model[J].IEEE Transactions on Image Processing.2005,14(10).1647-1659.
[11]Rother C,Kolmogorov V,Blake A.“GrabCut” - Interactive foreground extraction using iterated graph cuts[J].ACM Transactions on Graphics.2004,23(3).309-314.
[12]Thierry,Blu,Philippe,Thévenaz.Linear interpolation revitalized.[J].IEEE transactions on image processing: a publication of the IEEE Signal Processing Society.2004,13(5).710-9.DOI:10.1109/tip.2004.826093.
[13]Giles C.L.,Lawrence S…Face recognition: a convolutional neural-network approach[J].IEEE Transactions on Neural Networks.1997,8(1).
[14]Michael Kass,Andrew WitkinDemetri Terzopoulos.Snakes: Active contour models[J].International Journal of Computer Vision.1988,1(4).321-331.
[15]佚名.Learning representations by back-propagating errors[J].Nature.1986,323(6088).533-536.DOI:10.1038/323533a0.
[16]J J, Hopfield,D W, Tank.“Neural” computation of decisions in optimization problems.[J].Biological cybernetics.1985,52(3).141-52.
[17]Ephraim, Y.,Malah, D…Speech enhancement using a minimum-mean square error short-time spectral amplitude estimator[J].Acoustics, Speech & Signal Processing, IEEE Transactions on.1984,32(6).1109-1121.
[18]Lloyd, S…Least squares quantization in PCM[J].Information Theory, IEEE Transactions on.1982,28(2).129-137.
[19]A, Rosenfeld.The Max Roberts Operator is a Hueckel-Type Edge Detector.[J].IEEE transactions on pattern analysis and machine intelligence.1981,3(1).101-3.















 610
610











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









