






1.下载数据集
!wget -N https://raw.githubusercontent.com/eebowen/Transfer-Learning-and-Deep-Neural-Network-Acceleration-for-Image-Classification/master/nntools.py
!wget -N https://www2.eecs.berkeley.edu/Research/Projects/CS/vision/bsds/BSDS300-images.tgz
!tar -zxvf BSDS300-images.tgz
dataset_root_dir = './BSDS300/images/'
%matplotlib inline
%matplotlib inline
import os
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.data as td
import torchvision as tv
from PIL import Image
import matplotlib.pyplot as plt
import time
2.训练集加噪
标准差为30的高斯噪声180*180彩铅(左上角或者随机位置)
class NoisyBSDSDataset(td.Dataset):
def __init__(self, root_dir, mode='train', image_size=(180, 180), sigma=30):
super(NoisyBSDSDataset, self).__init__()
self.mode = mode
self.image_size = image_size
self.sigma = sigma
self.images_dir = os.path.join(root_dir, mode)
self.files = os.listdir(self.images_dir)
def __len__(self):
return len(self.files)
def __repr__(self):
return "NoisyBSDSDataset(mode={}, image_size={}, sigma={})". \
format(self.mode, self.image_size, self.sigma)
def __getitem__(self, idx):
img_path = os.path.join(self.images_dir, self.files[idx])
clean = Image.open(img_path).convert('RGB')
# 随机裁剪
#i = np.random.randint(clean.size[0] - self.image_size[0])
#j = np.random.randint(clean.size[1] - self.image_size[1])
i=0
j=0
clean = clean.crop([i, j, i+self.image_size[0], j+self.image_size[1]])
transform = tv.transforms.Compose([
# 转换张量
tv.transforms.ToTensor(),
# [−1, 1]
tv.transforms.Normalize((.5, .5, .5), (.5, .5, .5))
])
clean = transform(clean)
noisy = clean + 2 / 255 * self.sigma * torch.randn(clean.shape)
return noisy, clean
def myimshow(image,ax = plt):
image = image.to('cpu').numpy()
image = np.moveaxis(image,[0,1,2],[2,0,1])
image = (image + 1) / 2
image[image < 0] = 0
image[image > 1] = 1
h = ax.imshow(image)
ax.axis('off')
return h
导入训练集和测试集进入
train_set= NoisyBSDSDataset(dataset_root_dir)
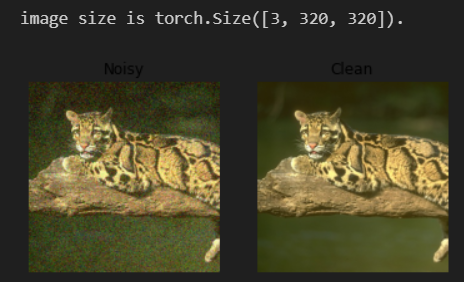
test_set = NoisyBSDSDataset(dataset_root_dir,mode = 'test',image_size = (320,320))
x = test_set[0]
fig, axes = plt.subplots(ncols=2)
myimshow(x[0], ax=axes[0])
axes[0].set_title('Noisy')
myimshow(x[1], ax=axes[1])
axes[1].set_title('Clean')
print(f'image size is {x[0].shape}.')
3.DnCNN
loss使用的是MSELoss
import nntools as nt
class NNRegressor(nt.NeuralNetwork):
def __init__(self):
super(NNRegressor, self).__init__()
self.mse = nn.MSELoss()
def criterion(self, y, d):
return self.mse(y, d)
CNN网络为什么要写一个权重
无权重初始化
class DnCNN(NNRegressor):
def __init__(self, D, C=64):
super(DnCNN, self).__init__()
self.D = D
self.conv = nn.ModuleList()
self.conv.append(nn.Conv2d(3, C, 3, padding=1))
self.conv.extend([nn.Conv2d(C, C, 3, padding=1) for _ in range(D)])
self.conv.append(nn.Conv2d(C, 3, 3, padding=1))
self.bn = nn.ModuleList()
for k in range(D):
self.bn.append(nn.BatchNorm2d(C, C))
def forward(self, x):
D = self.D
h = F.relu(self.conv[0](x))
for i in range(D):
h = F.relu(self.bn[i](self.conv[i+1](h)))
y = self.conv[D+1](h) + x
return y
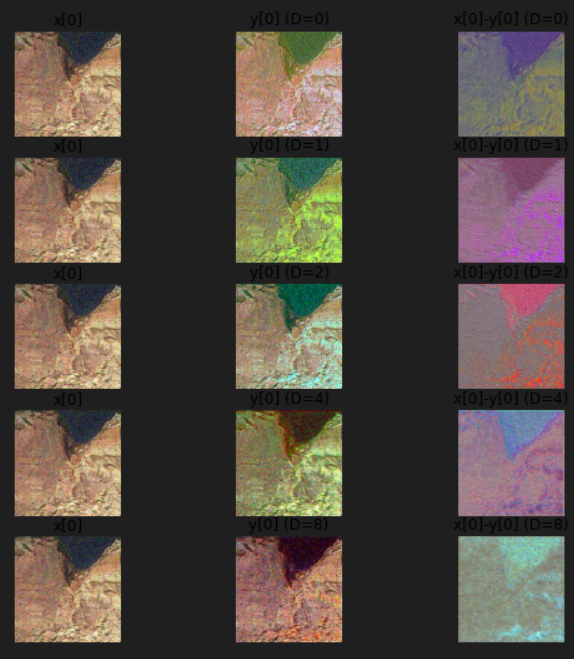
x, _ = train_set[-1]
x = x.unsqueeze(0).to(device)
Ds = [0, 1, 2, 4, 8]
fig, axes = plt.subplots(nrows=len(Ds), ncols=3, figsize=(9,9))
for i in range(len(Ds)):
with torch.no_grad():
model = DnCNN(Ds[i]).to(device)
y = model.forward(x) # 4-d
# 3-d
myimshow(x[0], ax=axes[i][0])
axes[i][0].set_title('x[0]')
myimshow(y[0], ax=axes[i][1])
axes[i][1].set_title(f'y[0] (D={Ds[i]})')
myimshow(x[0]-y[0], ax=axes[i][2])
axes[i][2].set_title(f'x[0]-y[0] (D={Ds[i]})')
 D = 0才有残差输出,梯度消失,没法炼丹
D = 0才有残差输出,梯度消失,没法炼丹
带着权重跑一下
class DnCNN(NNRegressor):
def __init__(self, D, C=64):
super(DnCNN, self).__init__()
self.D = D
self.conv = nn.ModuleList()
self.conv.append(nn.Conv2d(3, C, 3, padding=1))
self.conv.extend([nn.Conv2d(C, C, 3, padding=1) for _ in range(D)])
self.conv.append(nn.Conv2d(C, 3, 3, padding=1))
# Kaiming正态分布初始化,又叫啥He('s) initialization
for i in range(len(self.conv[:-1])):
nn.init.kaiming_normal_(self.conv[i].weight.data, nonlinearity='relu')
# Batch norm
self.bn = nn.ModuleList()
self.bn.extend([nn.BatchNorm2d(C, C) for _ in range(D)])
# Batch norm layer 初始化权值
for i in range(D):
nn.init.constant_(self.bn[i].weight.data, 1.25 * np.sqrt(C))
def forward(self, x):
D = self.D
h = F.relu(self.conv[0](x))
for i in range(D):
h = F.relu(self.bn[i](self.conv[i+1](h)))
y = self.conv[D+1](h) + x
return y
x, _ = train_set[-1]
x = x.unsqueeze(0).to(device)
Ds = [0, 1, 2, 4, 8]
fig, axes = plt.subplots(nrows=len(Ds), ncols=3, figsize=(9,9))
for i in range(len(Ds)):
with torch.no_grad():
model = DnCNN(Ds[i]).to(device)
y = model.forward(x)
myimshow(x[0], ax=axes[i][0])
axes[i][0].set_title('x[0]')
myimshow(y[0], ax=axes[i][1])
axes[i][1].set_title(f'y[0] (D={Ds[i]})')
myimshow(x[0]-y[0], ax=axes[i][2])
axes[i][2].set_title(f'x[0]-y[0] (D={Ds[i]})')
计算PSNR
class DenoisingStatsManager(nt.StatsManager):
def __init__(self):
super(DenoisingStatsManager, self).__init__()
def init(self):
super(DenoisingStatsManager, self).init()
self.running_psnr = 0
def accumulate(self, loss, x, y, d):
super(DenoisingStatsManager, self).accumulate(loss, x, y, d)
n = x.shape[0] * x.shape[1] * x.shape[2] * x.shape[3]
self.running_psnr += 10*torch.log10(4*n/(torch.norm(y-d)**2))
def summarize(self):
loss = super(DenoisingStatsManager, self).summarize()
psnr = self.running_psnr / self.number_update
return {'loss': loss, 'PSNR': psnr.cpu()}
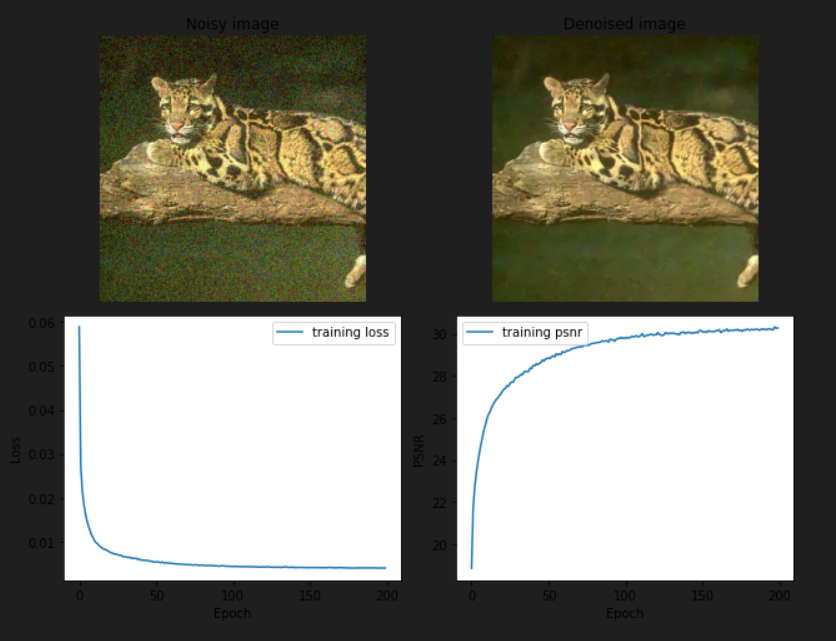
def plot(exp, fig, axes, noisy, visu_rate=2):
if exp.epoch % visu_rate != 0:
return
with torch.no_grad():
denoised = exp.net(noisy[None].to(net.device))[0]
axes[0][0].clear()
axes[0][1].clear()
axes[1][0].clear()
axes[1][1].clear()
myimshow(noisy, ax=axes[0][0])
axes[0][0].set_title('Noisy image')
myimshow(denoised, ax=axes[0][1])
axes[0][1].set_title('Denoised image')
axes[1][0].plot([exp.history[k][0]['loss'] for k in range(exp.epoch)], label='training loss')
axes[1][0].set_ylabel('Loss')
axes[1][0].set_xlabel('Epoch')
axes[1][0].legend()
axes[1][1].plot([exp.history[k][0]['PSNR'] for k in range(exp.epoch)], label='training psnr')
axes[1][1].set_ylabel('PSNR')
axes[1][1].set_xlabel('Epoch')
axes[1][1].legend()
plt.tight_layout()
fig.canvas.draw()
lr = 1e-3
net = DnCNN(6).to(device)
adam = torch.optim.Adam(net.parameters(), lr=lr)
stats_manager = DenoisingStatsManager()
exp1 = nt.Experiment(net, train_set, test_set, adam, stats_manager, batch_size=4,
output_dir="./checkpoints/denoising1", perform_validation_during_training=True)
fig, axes = plt.subplots(ncols=2, nrows=2, figsize=(9, 7))
exp1.run(num_epochs=200, plot=lambda exp: plot(exp, fig=fig, axes=axes,
noisy=test_set[0][0]))
Start/Continue training from epoch 0
Epoch 1 (Time: 18.39s)
Epoch 2 (Time: 17.80s)
Epoch 3 (Time: 18.02s)
Epoch 4 (Time: 18.07s)
Epoch 5 (Time: 17.95s)
Epoch 6 (Time: 18.16s)
Epoch 7 (Time: 18.09s)
Epoch 8 (Time: 18.08s)
Epoch 9 (Time: 18.15s)
Epoch 10 (Time: 17.98s)
Epoch 11 (Time: 18.09s)
Epoch 12 (Time: 18.07s)
Epoch 13 (Time: 17.90s)
Epoch 14 (Time: 18.11s)
Epoch 15 (Time: 18.09s)
Epoch 16 (Time: 18.08s)
Epoch 17 (Time: 18.11s)
Epoch 18 (Time: 17.96s)
Epoch 19 (Time: 18.06s)
Epoch 20 (Time: 18.09s)
Epoch 21 (Time: 18.03s)
Epoch 22 (Time: 18.21s)
Epoch 23 (Time: 18.20s)
Epoch 24 (Time: 18.09s)
…
Epoch 198 (Time: 18.09s)
Epoch 199 (Time: 18.07s)
Epoch 200 (Time: 18.20s)
Finish training for 200 epochs
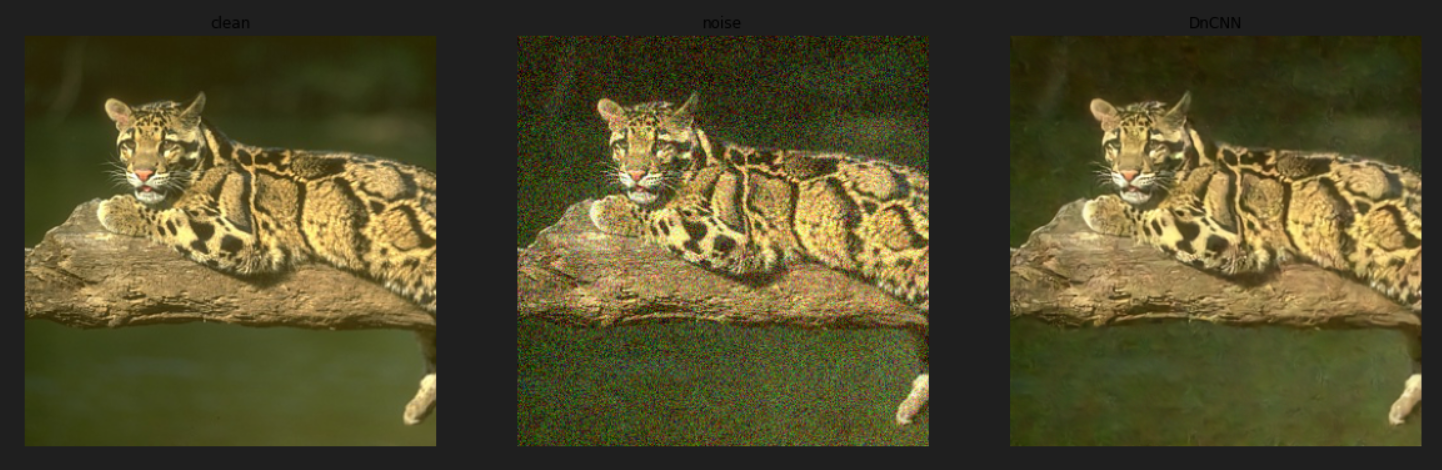
img = []
model = exp1.net.to(device)
titles = ['clean', 'noise', 'DnCNN']
x, clean = test_set[0]
x = x.unsqueeze(0).to(device)
img.append(clean)
img.append(x[0])
model.eval()
with torch.no_grad():
y = model.forward(x)
img.append(y[0])
fig, axes = plt.subplots(ncols=3, figsize=(20,10), sharex='all', sharey='all')
for i in range(len(img)):
myimshow(img[i], ax=axes[i])
axes[i].set_title(f'{titles[i]}')
















 1039
1039











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











