






随着人口老龄化,如何改善老人运动健康成为了我们这个时代的一大挑战。近期,一项研究探索了将工业机器人调整以辅助运动治疗的可能性。实验重点关注运用惯性测量单元(IMU)来分析下肢动作,从而评估治疗效果实施效果。

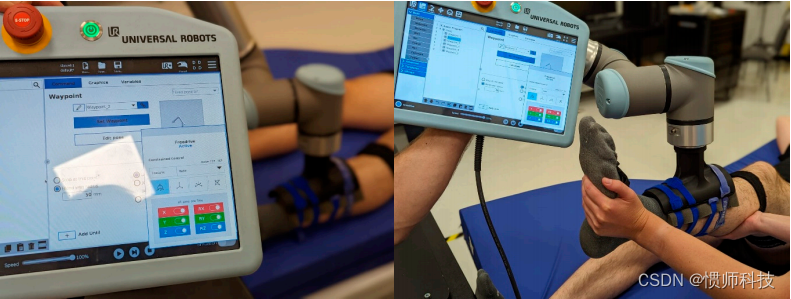
实验包括了四轮共计十次的本体感知神经肌肉便利化(PNF)运动的重复,前两轮由物理治疗师协助完成,后两轮则由机器人辅助。通过IMU采集的数据,详细分析了髋关节的屈曲和外展角度、膝关节的屈曲和旋转角度、踝关节的背屈角度以及动作周期。研究结果表明,机器人在重复精确的物理治疗动作方面发挥了独特的作用,且在髋关节和膝关节动作的重现方面的性能表现卓越。
研究结果展现了机器人在运动治疗中复现物理治疗动作方面的显著潜力,预示着工业机器人在医疗康复中的创新应用前景。而IMU作为记录和分析动作的关键技术,在精确捕捉与评价治疗效果中起到了不可或缺的作用。这一实验不仅对改善现有的康复疗程有着实际的意义,对于IMU工程师们进一步针对医疗设备优化这一技术也具有启发性的指导价值。
















 1094
1094











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









