






如何焊接F3 EVO有刷飞行控制器
原文地址:https://www.instructables.com/How-to-Solder-the-F3-EVO-Brushed-Flight-Controller/
简介:如何焊接F3 EVO有刷飞行控制器
这是一个有关如何焊接F3-EVO刷式飞行控制器用于微型刷式四轴飞行器的简短教程。您可以在整个Internet上找到该标牌,尤其是在Banggood或Gearbest等中国在线商店中。这是启动自己的DIY微型四轴飞行器的理想选择。
步骤1:董事会概况
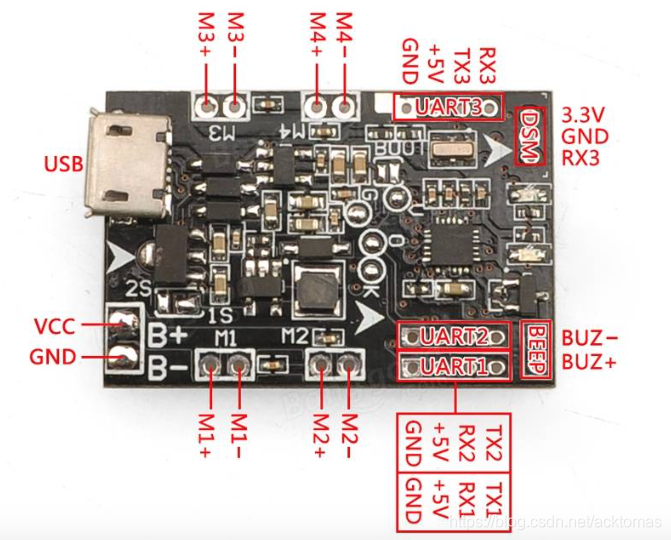
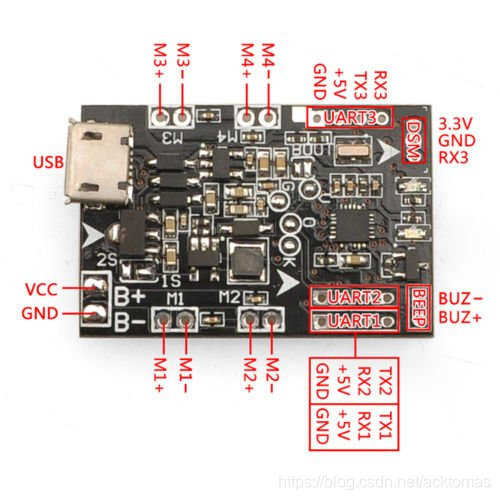
板上满是孔,可以在一台FPV摄像机中连接电动机,接收器和所有设备。这些图片为您提供了概述。
- USB端口,用于将开发板连接到计算机并调整Cleanflight(已预先安装)
- 电池连接B +和B-
- 电机连接M1-M4
- 用于AIO摄像机和接收器的UART端口1-3
- 蜂鸣器的Buz端口
- 频谱卫星的DSM
步骤2:连接电池引线
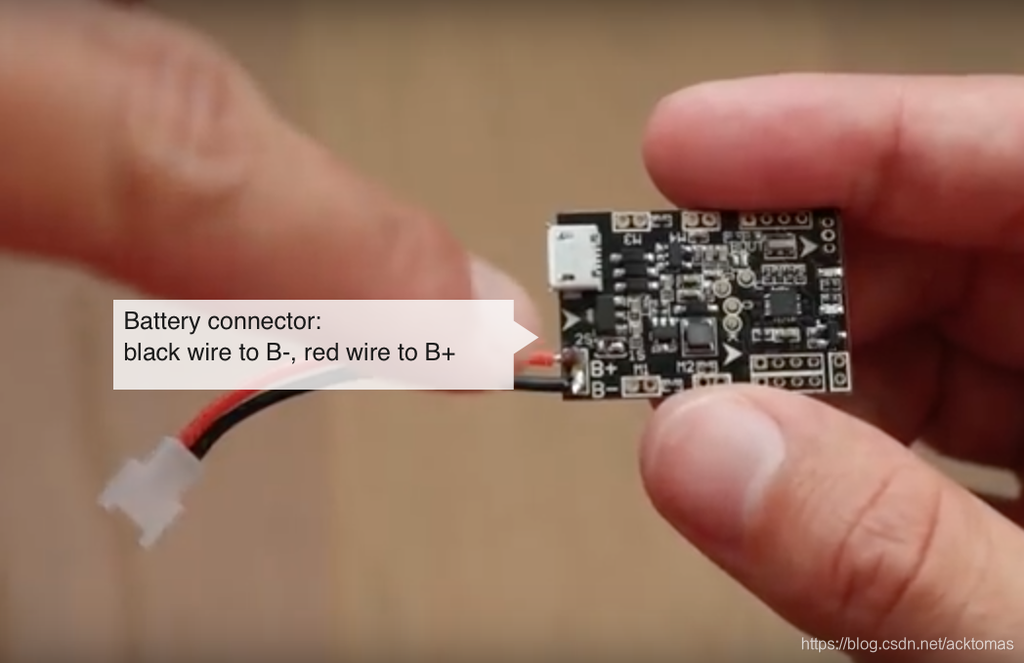
- 将黑色电池引线焊接到B-
- 将红色电池引线焊接到B +
步骤3:连接马达
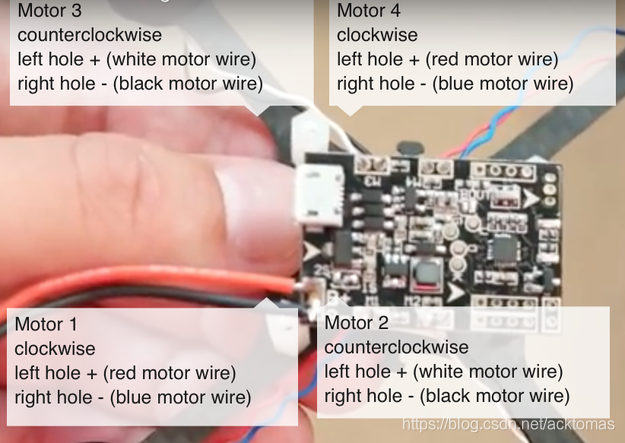
将有刷电机焊接到板上:
- M1:顺时针有刷电机(通常红色导线连接到+极,蓝色导线连接到-极)
- M2:逆时针有刷电机(通常白线接到+极,黑线接到-极)
- M3:逆时针有刷电机(通常白线接+极,黑线接-极)
- M4:顺时针有刷电机(通常是红色导线连接到+极,蓝色导线连接到-极)
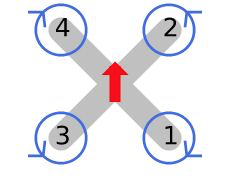
图片中显示了标准的Cleanflight Quad X布局。
步骤4:连接AIO FPV摄像机
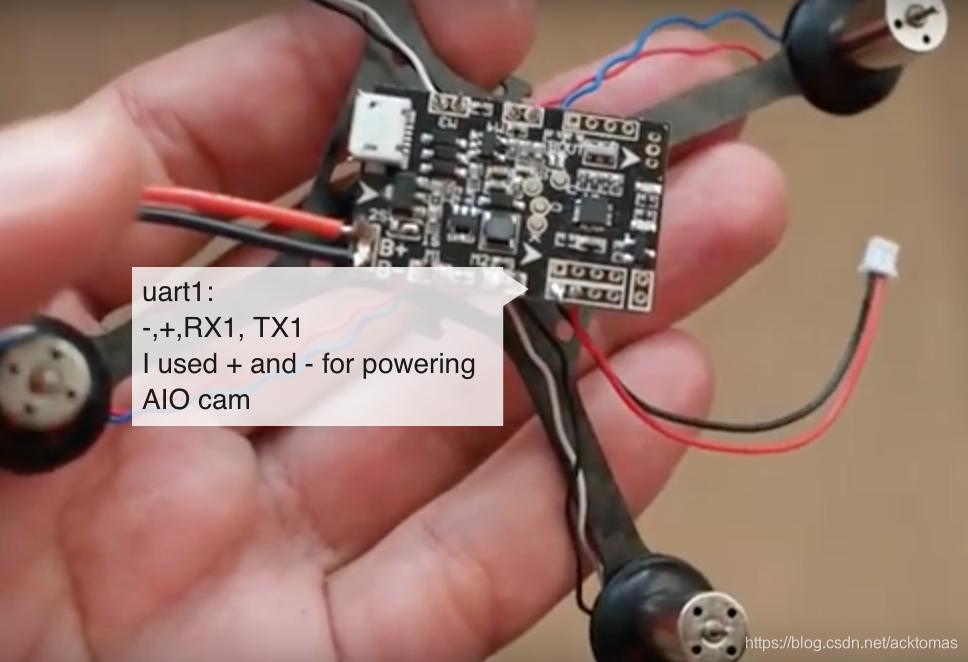
- 我使用UART 1端口连接AIO FPV摄像机。它提供5V。
- 将AIO摄像机的黑色电源线焊接到-
- 将AIO相机的红色电源线焊接到+
步骤5:连接接收器
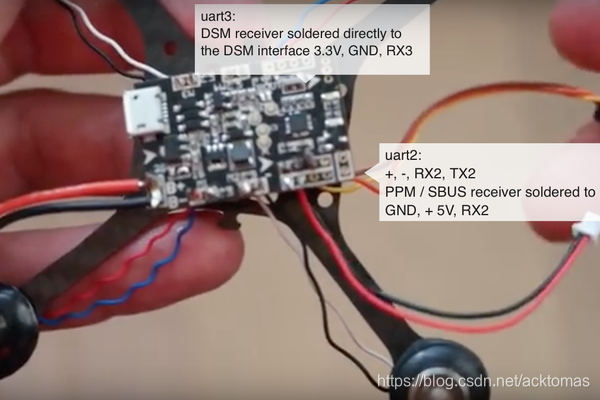
您有几种选择来连接接收器。您可以使用PPM,SBUS或DSM。
DSM接收器:
- 将DSM正极引线焊接到3.3V,负极引线焊接到GND,信号引线焊接到RX3,
- 在Cleanflight中,您需要启用UART3作为串行RX。
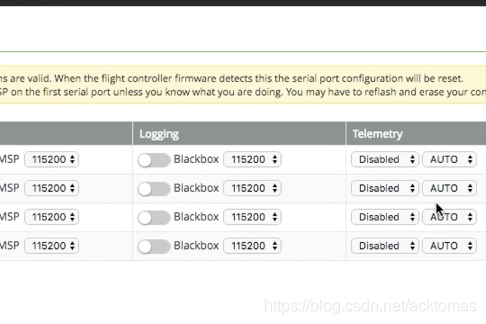
PPM和SBUS接收器:
- 焊接至UART2,负引线至GND,正引线至+ 5V,信号引线至RX2
- 在Cleanflight中,您需要启用UART2作为串行RX(参见图片)

















 3447
3447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ZxUX1IqV-1619055765280)(C:%5CUsers%5CAdministrator%5CPictures%5Ctypora%5CF6ISECDIVHQOS00.png)]](https://content.instructables.com/ORIG/F6I/SECD/IVHQOS00/F6ISECDIVHQOS00.png?auto=webp&frame=1&fit=bounds&md=3bb962fb1a09e262c35bade12f85ae7f){kind=link}