







搭建四旋翼系统
机架: XR215 Plus 328
分线板:XR215 Plus PDB
飞控: SP Racing F3 标准版(Acro) 86
电机: 银燕RS2205 2300KV 400
电调: TYPHEERX XY30A 340
浆: 5寸浆 T5040 T5045 13
防撞圈:KingKong 5寸浆保护罩 12
接收机:RadioLinkR7EH
遥控器:RadioLink T6EHP-E
说明:因为手头我手头上只有一个穿越机,只是拿来调试,实际上这种自主无人机系统,要加一块板载计算机的,所以215的机架肯定不行,如果要实际飞行,至少要450或者650的,要不人放不下,也没法飞。
安装:
接线板焊接示意图
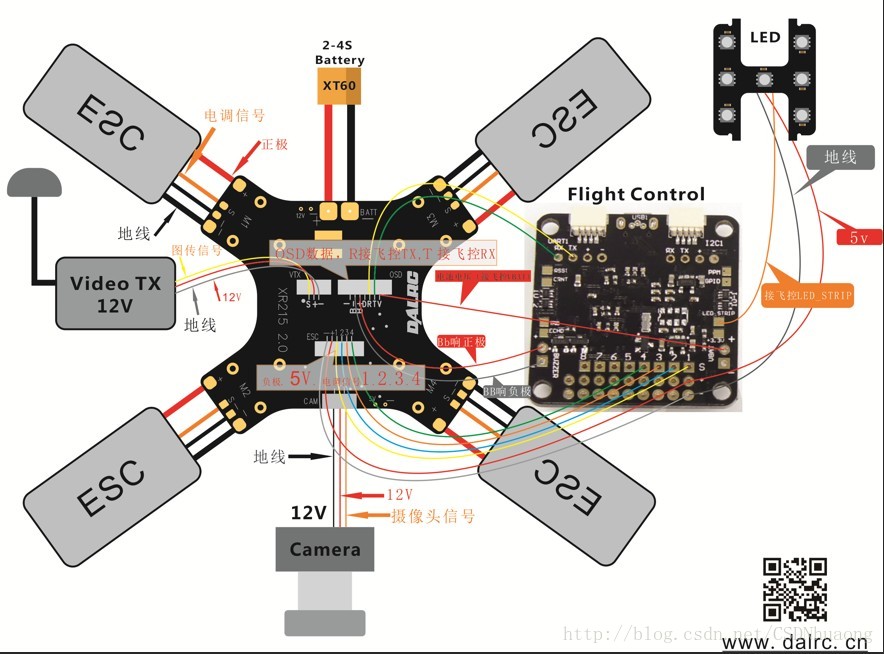
焊接:
焊接分线板的电池香蕉头(注意正负极)
焊接分线板上的5V输出(飞控供电端口)
焊接电调与电机的连线【注意焊接电调时,电机的正反转向】
连接:
分线板连接示意图
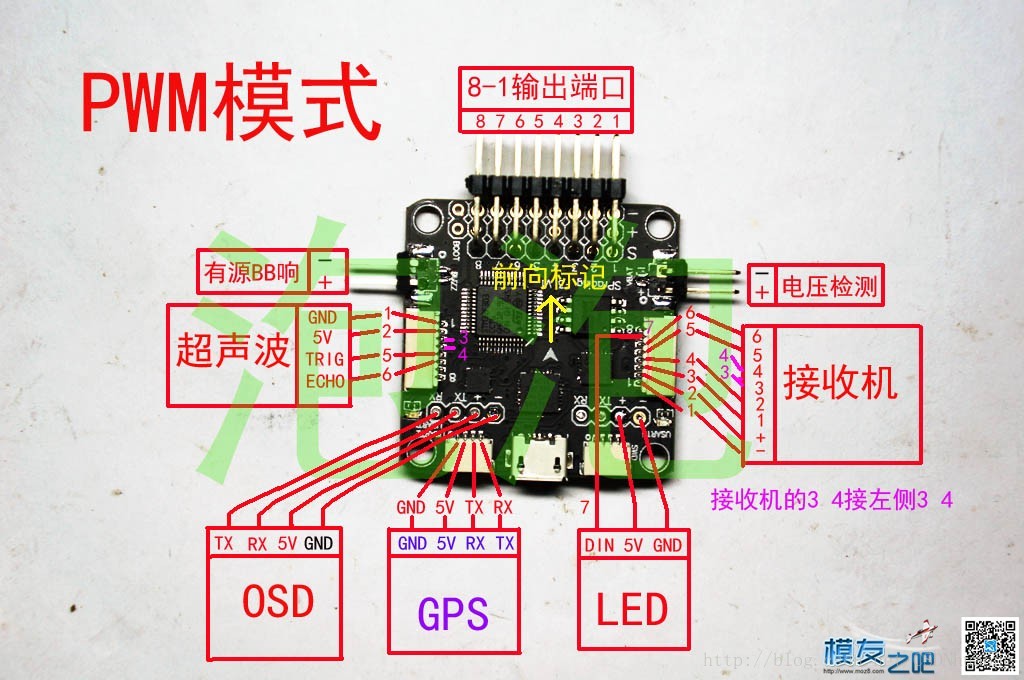
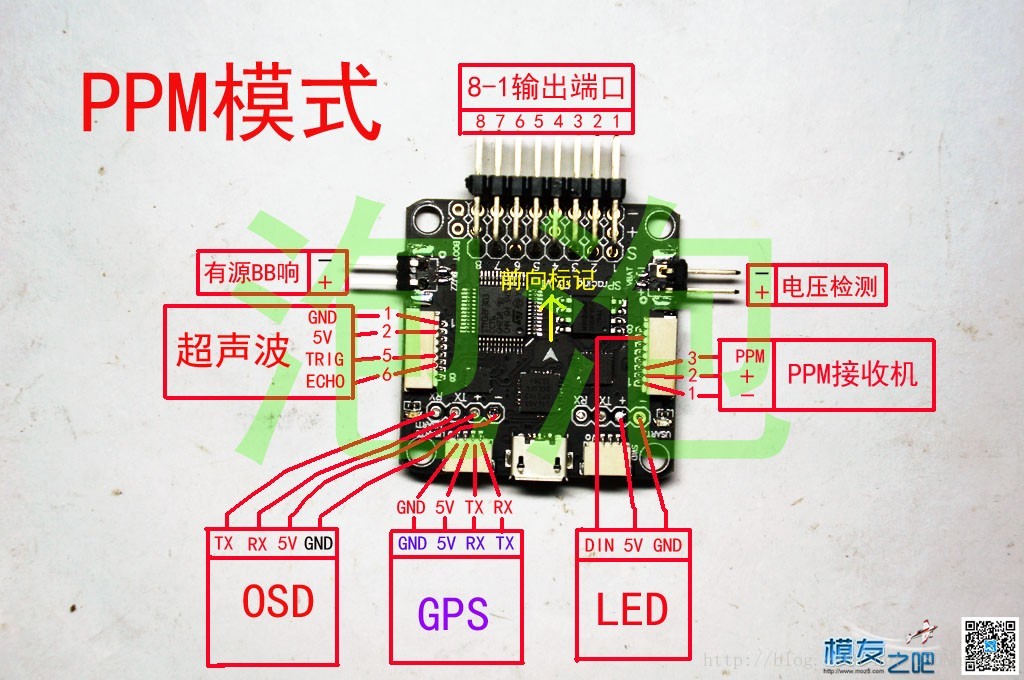
飞控SP Racing F3连接示意图
配置:
地面站软件:

固件烧写
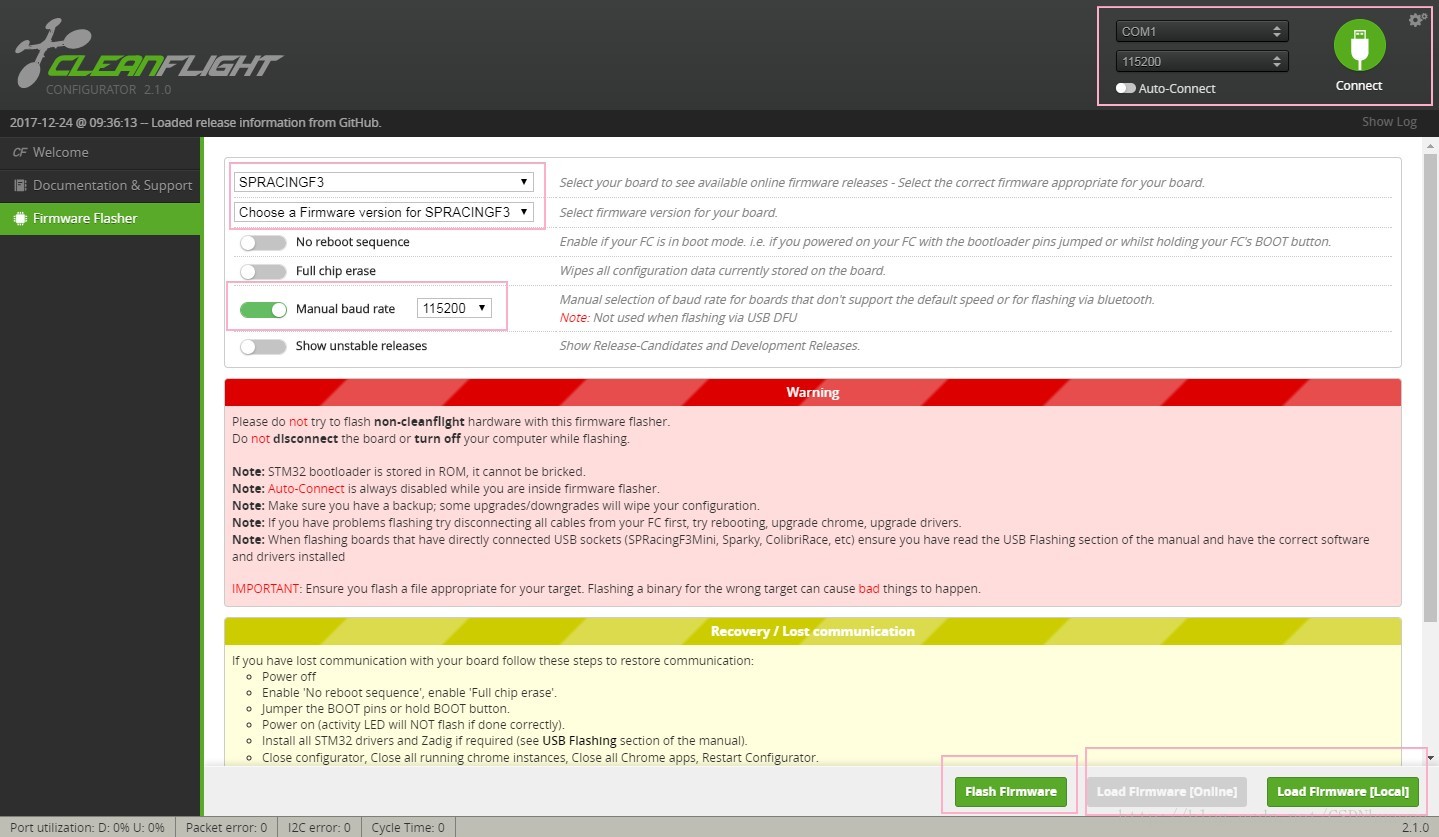
USB连上飞控,但是断开与飞控连接
选择飞控的类型与固件版本
固件可以选择通过Online 和 Local的方式加载固件
可以通过 https://github.com/cleanflight/cleanflight/releases 下载相应固件,然后本地加载的方式。
然后 点击 Flash Firmware烧写固件,如果失败试着把波特率调小一点
初始配置
调试:
参考文档
SP Racing F3飞控安装


















 3440
3440

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











