






目录
6. BI_8PWM_3SW_SBUS(8路PWM电磁舵飞机)
概览
尺寸: 9.5x11.4x2.0mm,适用1:64/1:87模型
重量: 0.3g
供电电压:3.3-6V
无线协议:内置12种无线协议,支持FUTABA,RADIOLINK,DUMBORC,FRSKY,FLYSKY,MC6C,WFLY2等,点我看具体型号(ELRS除外)
灯光控制:内置联动,多种控制方式,3通及以上都可全部控制。
双向有刷电调:最大电流1.8A,持续电流1A , 一路
输出信号:有6个输出模式可选,可以输出多路标准PWM,电调PWM, SBUS和PPM。
外接灯光规格: 0402/0603LED, 总电流不可超600毫安,每路可接2-3个LED.
遥测回传:电压,信号强度,丢包率,仅部分协议支持,如RADIOLINK,DUMBORC, FLYSKY,WLFY2等
遥控距离:使用天地飞ET16S,地面无遮挡,内置天线约40米,外置3db的铜管天线约150米。
对码及模式选择操作
对码和模式选择的方法请看加密狗的说明书的1-4小节,是完全一样的操作。区别只是这个小的接收机只有一个指示灯,只有单色,只可以使用摩斯电码来判断当前的协议。

| 视频教程 |
| RX121BR静动接收机选择协议和对码的教程_哔哩哔哩_bilibili |
| RX121BR 静改动接收机切换工作模式教程_哔哩哔哩_bilibili |
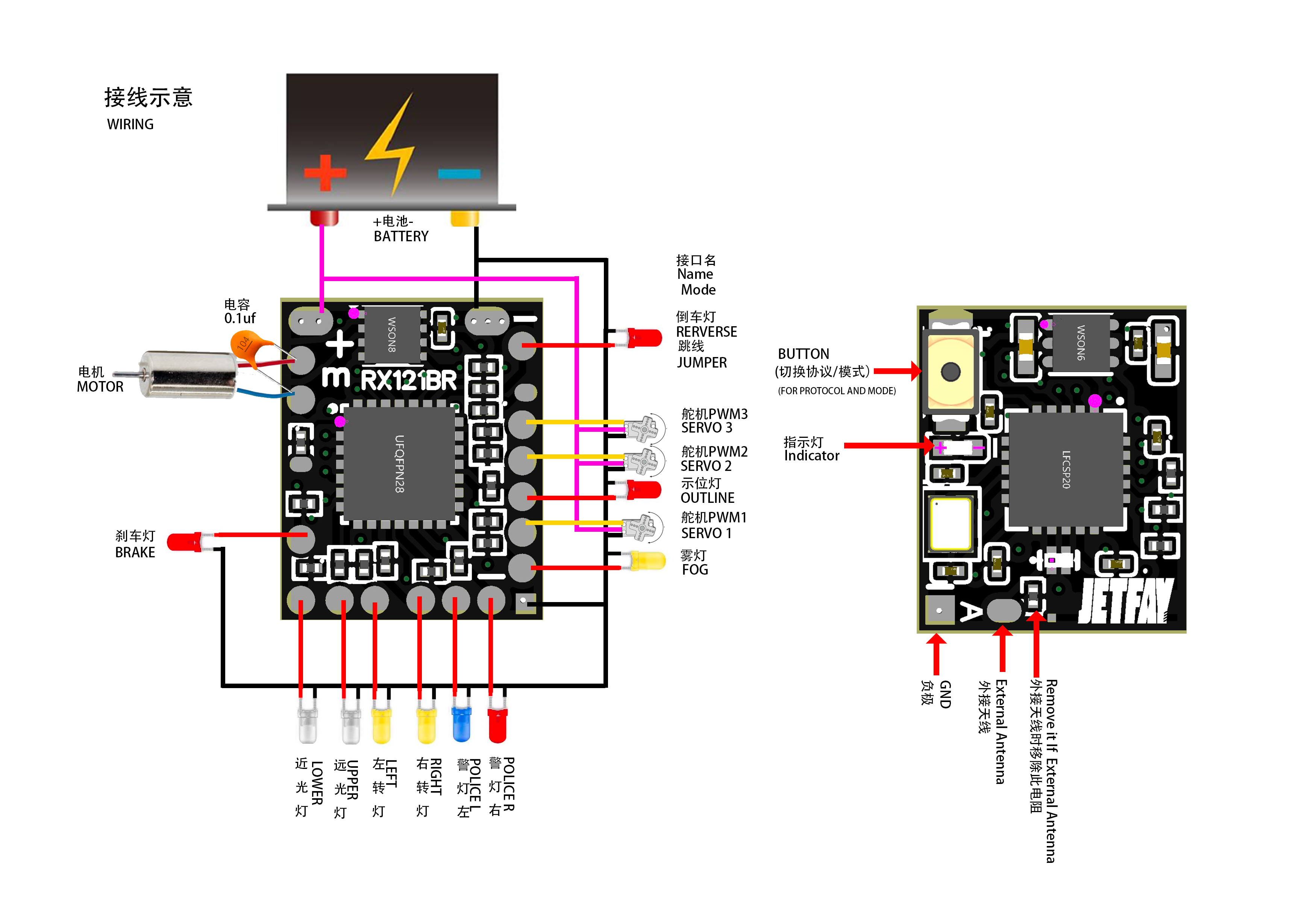
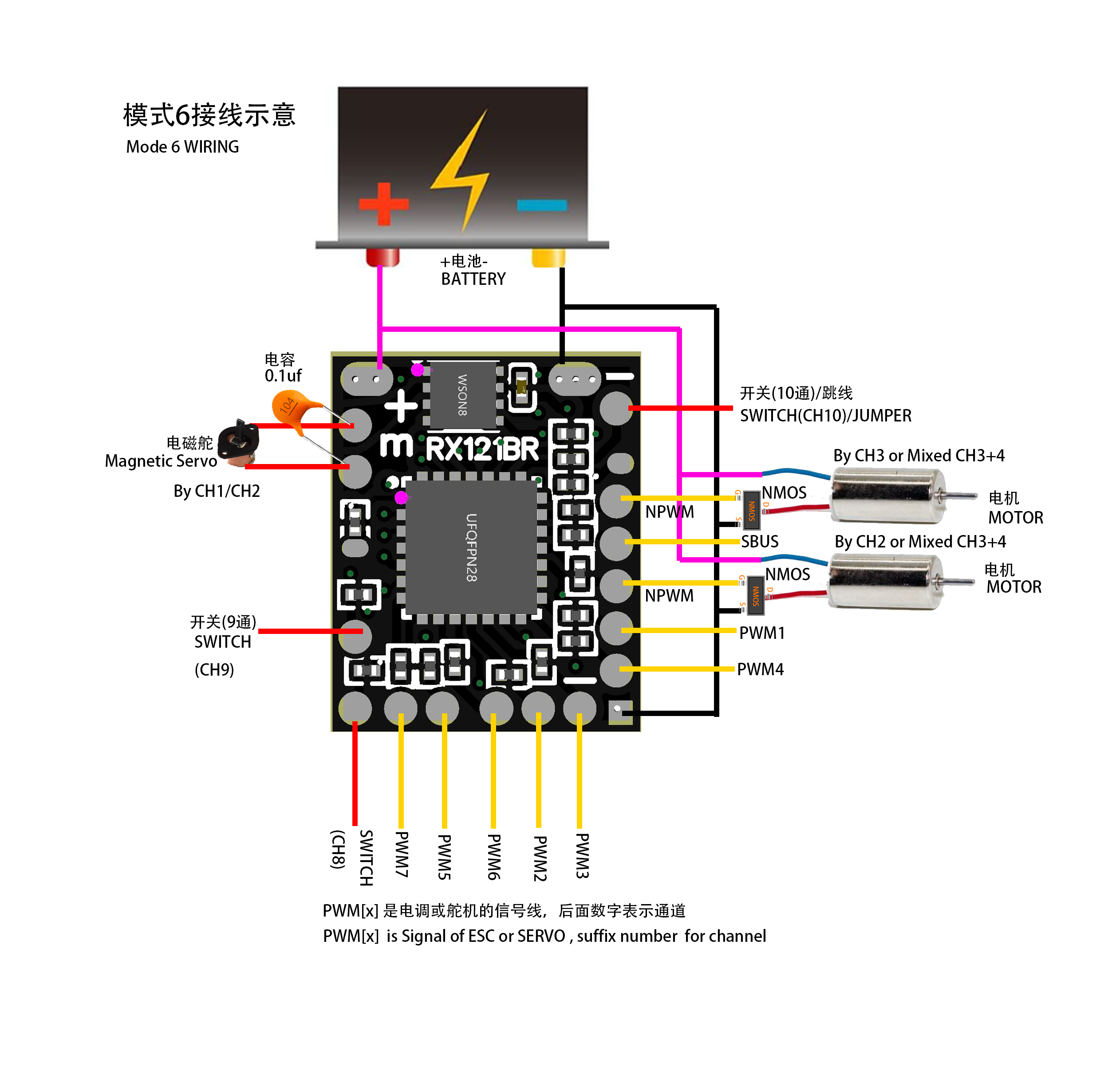
接线示意图
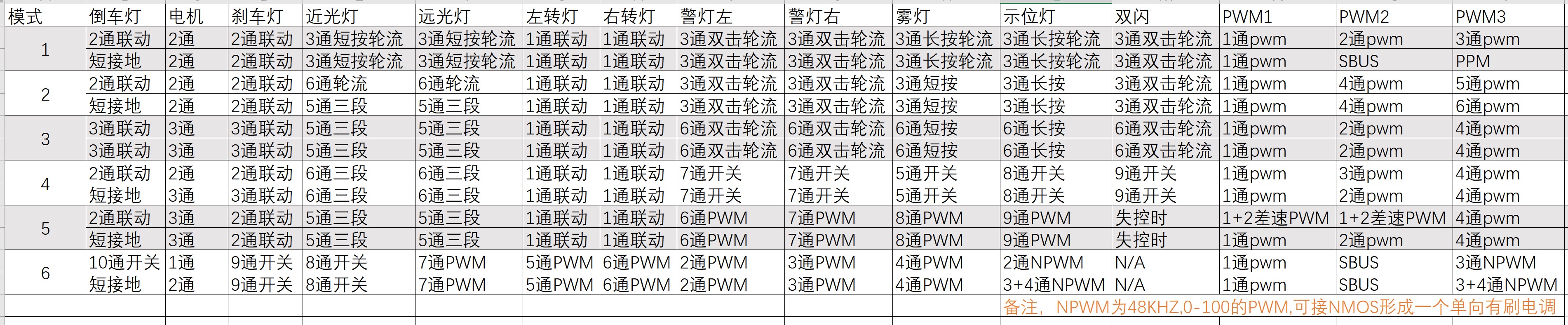
输出和控制矩阵图
一、灯光控制信号操作方法
- 初始状态
- 每个通道上电时读取的值为初始值
a。 - 动作判定条件:操作后通道值变化量
|a - b| > 300。
- 每个通道上电时读取的值为初始值
- 操作类型定义
- 短按(瞬时操作):
- 0.5秒内完成
a → b → a的舵量变化。
- 0.5秒内完成
- 长按(持续操作):
- 超过1.5秒完成
a → b → a变化。
- 超过1.5秒完成
- 双按(复合操作):
- 0.8秒内完成
a → b → a → b → a的双次触发(快速两次短按)。
- 0.8秒内完成
- 短按(瞬时操作):
二、灯光控制方法
- 轮流控制模式
- 应用场景:单通道控制两个灯光(A和B)。
- 触发流程:
A开启 → B开启 → B关闭 → A关闭 → 循环 - 示例:短按切换远近光灯时,按顺序轮流点亮。
- 三段式控制模式
- 应用场景:单通道控制两个灯光(A和B)。
- 舵量阈值:
- 最低值(默认关闭):A、B均关闭。
- 中间档(≥1300):仅A开启。
- 最高档(≥1700):A、B均开启。
- 示例:通过通道旋钮控制雾灯(A)和示位灯(B)。
三、倒车灯跳线配置
- 倒车灯接口可短接至负极作为硬件跳线,切换输出。
- 若需同时使用倒车灯,需串联 300Ω–1kΩ电阻 后接入电调反向输出焊点
四、模式详解
一共有6个模式,每个模式的介绍详细如下:
1. BI_PISTOLTX_3CH(3通道枪控)
- 基本控制
- 1通道:转向(SERVO)
- 2通道:内置电调(油门控制)
- 灯光联动
- 转向灯与1通道联动,刹车/倒车灯与2通道联动,失控时双闪。
- 3通道按键功能:
- 短按:切换远近光灯(轮流控制)
- 长按:切换雾灯和示位灯(轮流控制)
- 快速双按:切换警灯和双闪(警灯/雾灯/示位灯默认开启,双闪默认关闭)
- PWM输出
- PWM1:输出1通道信号(转向)
- PWM2:输出2通道信号;若倒车灯短接负极,则输出SBUS信号
- PWM3:输出3通道信号;若倒车灯短接负极,则输出PPM信号
适用遥控器:2或3通道枪控,如富斯的GT2/3系列。
2. BI_PISTOLTX_6CH(6通道枪控)
- 基本控制
- 1通道:转向,2通道:内置电调
- 灯光联动
- 转向灯与1通道联动,刹车/倒车灯与2通道联动,失控双闪。
- 3通道按键:短按控制雾灯,长按示位灯,双按切换警灯/双闪。
- 默认6通 轮流控制 远近光, 倒车灯短接时,5通三段式控制远近光灯。
- PWM输出
- PWM1:1通道(转向)
- PWM2:4通道信号
- PWM3:5通道信号, 倒车灯短接时,输出6通道。
适用遥控器:支持6通道的枪控,小飞象x6,RC6GS
3. BI_PANNELTX_6CH(6通道面板控)
- 基本控制
- 1通道:转向,3通道:内置电调
- 灯光联动
- 转向灯与1通道联动,刹车/倒车灯与3通道联动。
- 5通道:三段式控制远近灯(舵量分段:<1300关,1300-1700近光,>1700远光)
- 6通道按键:短按雾灯,长按示位灯,双按切换警灯/双闪
- PWM输出
- PWM1:1通道(转向)
- PWM2:2通道信号
- PWM3:4通道信号
适用遥控器:FS-I6/x/s,MC6/7/10c/mini,mc8b/10等面板式遥控器。
4. BI_TX10CH(10通道高端控)
- 基本控制
- 默认1通道转向,2通道电调;若倒车灯短接负极,则由3通道控制电调
- 灯光联动
- 独立通道控制:5通雾灯、6通三段远近灯、7通警灯、8通示位灯、9通双闪
- PWM输出
- PWM1:1通道(转向)
- PWM2:默认3通道;倒车灯短接时输出2通道
- PWM3:4通道信号
- 适用遥控器:FUTABA 10PX、DDF350等10通道遥控器。
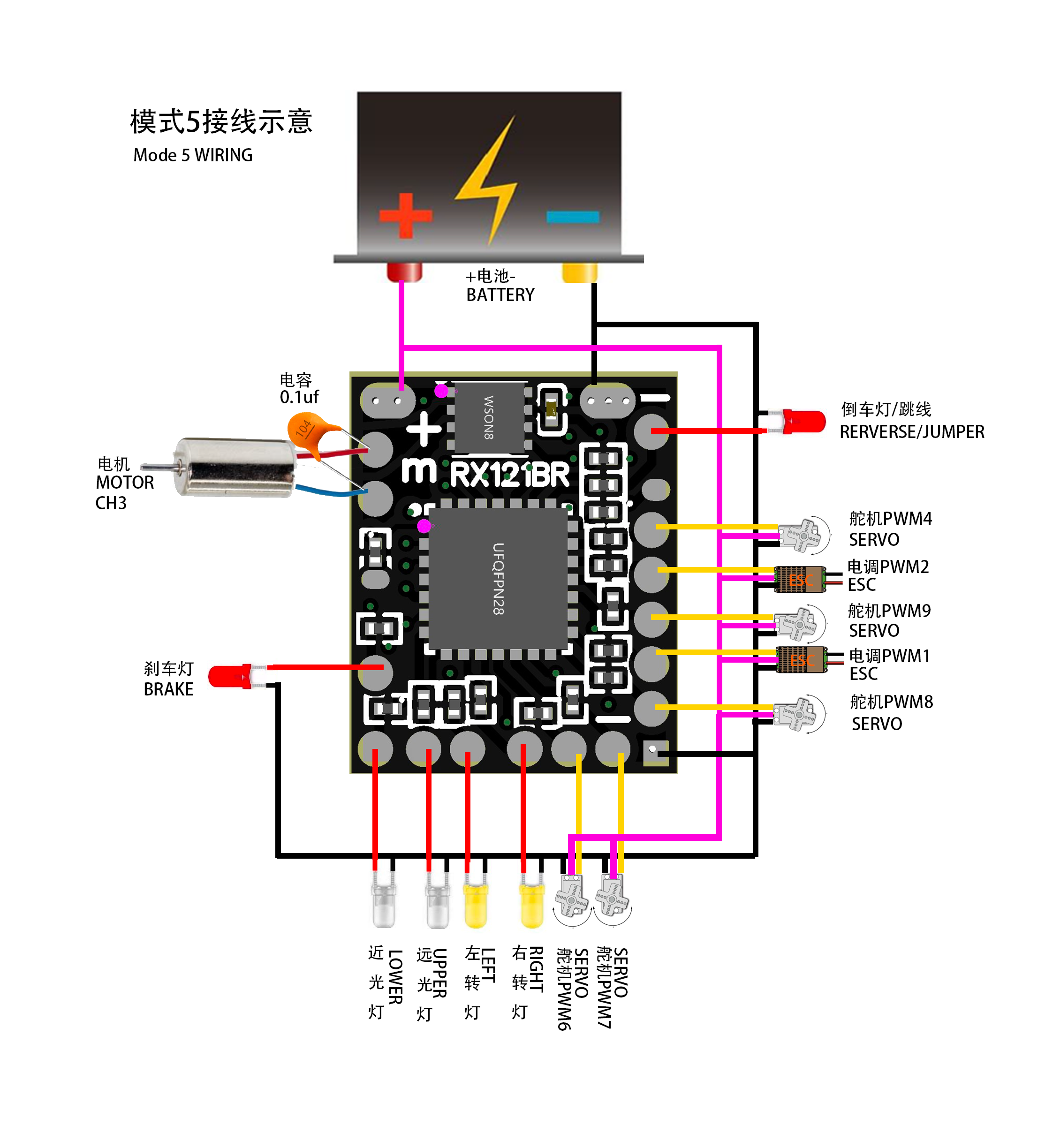
5. BI_7PWM_6LIGHT(7路PWM差速工程车)
- 基本控制
- 1通道转向,3通道内置电调(炮塔动力)
- 2通道独立或差速输出:默认与1通道混合差速(外接双向电调),当倒车灯短接负极时则独立输出2通PWM,可以自行在遥控器设置混合算法。
- 灯光联动
- 仅5通道三段式控制远近灯,无警灯/雾灯/示位灯
- PWM输出
- PWM1:1通道(转向)
- PWM2:2通道(差速或独立输出)
- PWM3:4通道信号
- 警灯L: 输出6通PWM
- 警灯R: 输出7通PWM
- 雾灯: 输出8通PWM
- 示位灯:输出9通PWM
6. BI_8PWM_3SW_SBUS(8路PWM电磁舵飞机)
- 应用场景:超轻电磁舵飞机或其它应用,支持SBUS飞控与NMOS扩流控制。
- 默认模式
- 1通道控制内置双向电调(控制翻滚电磁舵)
- PWM1: 输出1通PWM
- PWM2: 输出SBUS,可接飞控
- PWM3:3通道48kHz PWM(0-1000), 接NMOS的栅极实现单向ESC,控制电机或电磁舵
- 示位灯:2通道48kHz PWM(0-1000),接NMOS的栅极实现单向ESC,控制电机或电磁舵
- 警灯L: 输出2通PWM
- 警灯R: 输出3通PWM
- 雾灯: 输出4通PWM
- 左转: 输出5通PWM
- 右转: 输出6通PWM
- 远光: 输出7通PWM
- 近光: 8通开关,可接小电流灯光, 或可接NMOS扩流,接大电流灯光或设备
- 刹车: 9通开关,可接小电流灯光, 或可接NMOS扩流,接大电流灯光或设备
- 倒车: 10通开关,可接小电流灯光, 或可接NMOS扩流,接大电流灯光或设备
- 倒车灯短接模式
- 2通道控制内置双向电调(控制翻滚电磁舵)
- PWM1: 输出1通PWM
- PWM2: 输出SBUS,可接飞控
- PWM3: 3+4通单流混合差速输出 48Khz PWM(0-100), 接NMOS的栅极实现单向电子调速
- 示位灯: 3+4通单流混合差速输出 48Khz PWM(0-100), 接NMOS的栅极实现单向电子调速
- 警灯L: 输出2通PWM
- 警灯R: 输出3通PWM
- 雾灯: 输出4通PWM
- 左转: 输出5通PWM
- 右转: 输出6通PWM
- 远光: 输出7通PWM
- 近光: 8通开关,可接小电流灯光, 或可接NMOS的栅极扩流,接大电流灯光或设备
- 刹车: 9通开关,可接小电流灯光, 或可接NMOS的栅极扩流,接大电流灯光或设备
五、模式选择建议
| 模式编号 | 推荐场景 | 硬件要求 |
|---|---|---|
| 模式1 | 入门级静改动,或者接sbus和ppm飞控或加密狗 | 枪控+基础电调+LED灯组 |
| 模式2和3 | 静改动灯光改装漂移车 | 6通枪/板控+多路灯光控制器 |
| 模式4 | 高端静改动灯光改装漂移车 | 10通道高端控 |
| 模式5 | 全功能拖头/工程车 | 10通以上高端控+多路PWM扩展板 |
| 模式6 | 微型无人机/电磁舵滑翔机或其它应用 | SBUS飞控+NMOS电调模块 |
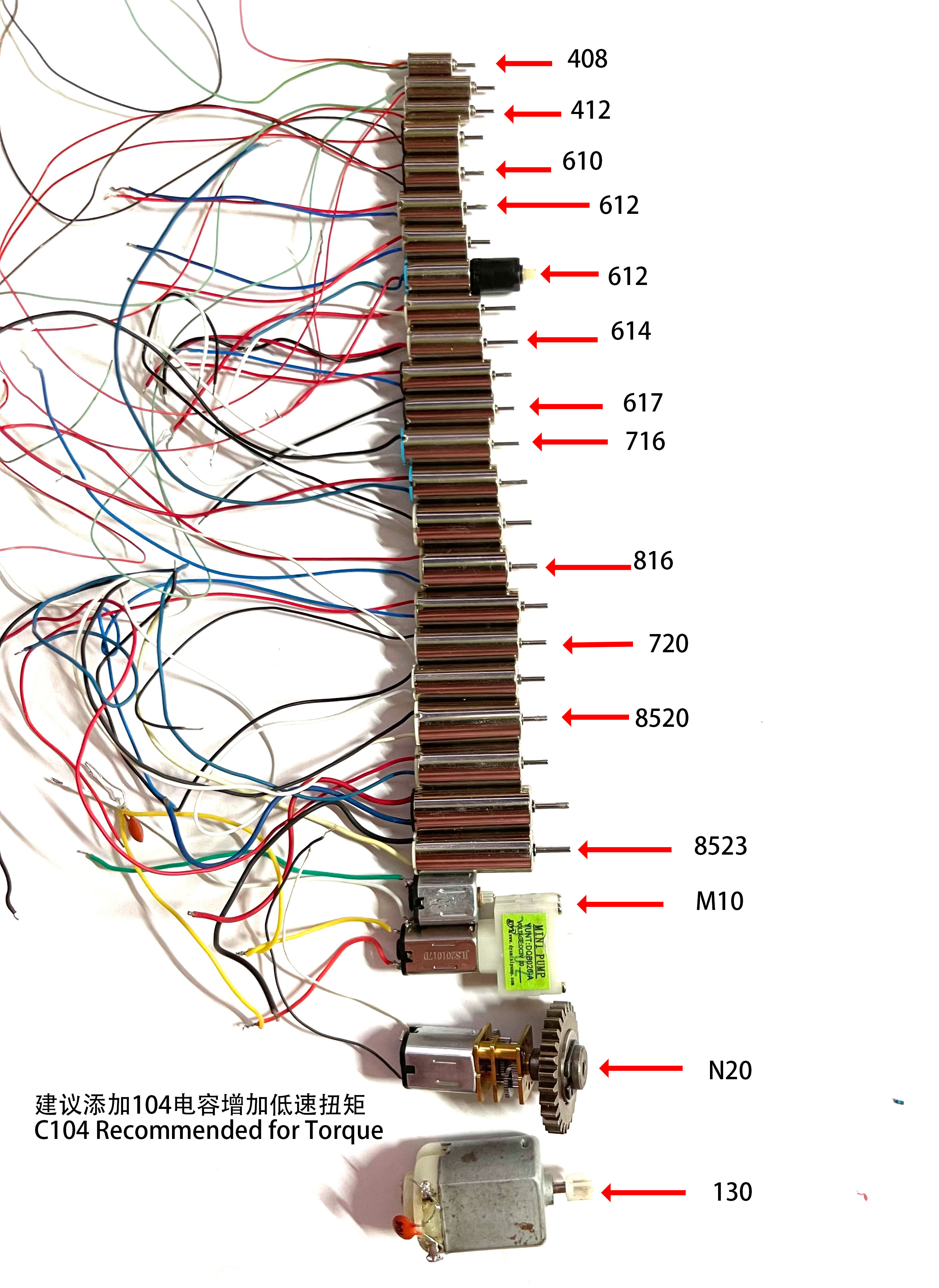
六、支持的电机
从408到 8523,m10-m20,到n20,到130, 使用大电机和大荷载时, 注意电池的放电c数要够,否则会引起压降,mcu低于3.3V 会死机。
为了提升低速扭矩,建议所有电机在电机输入两端并联一个104电容(0.1uf).
七、注意事项
-
电源线输出正负一定不要接反!
-
建议电压3.3-6V
-
每路灯光输出电流不要过载,每路3个左右。
-
遥控器校准:确保优美中位值正确。
-
失控保护:建议配置以免意外。

















 16万+
16万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









