






目录
(3)def _filter_zero-->class SubDataset(object)
(4) def shuffle-->class SubDataset(object)
(5) def _find_dataset--> class BANDataset(Dataset)
(6) def get_positive_pair-->class SubDataset(object)
(7) _get_bbox--> class BANDataset(Dataset)
(1) def _build_warm_up_scheduler
9. 原输入图片为(511,511,3),resize到输入网络的尺寸的入口
11. 输入shape 通道转成对应的3通道 (3,255,255)以及(3,127,127)入口
一、一些参数的图片展示
1. train.py
(1) main()
optimizer

lr_scheduler

dist_model

(2)def train
average_meter
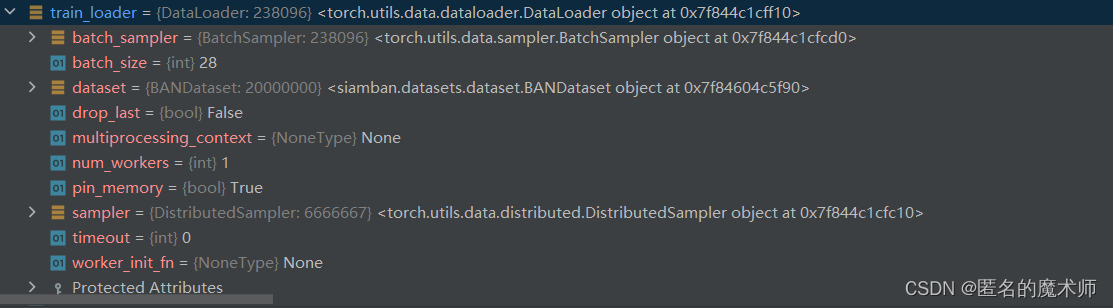
train_loader
data

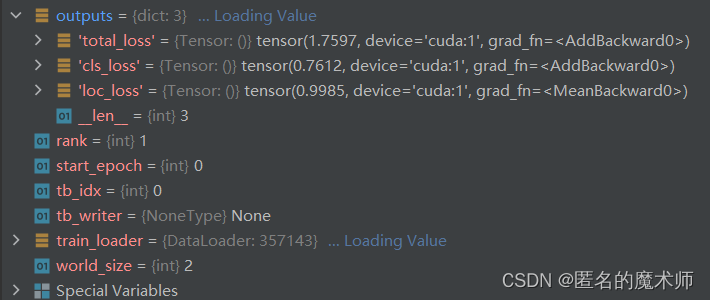
outputs
batch_info (first)

v
batch_info(second)

average_meter

v (batch_info)
(3) def build_data_loader()
train_dataset

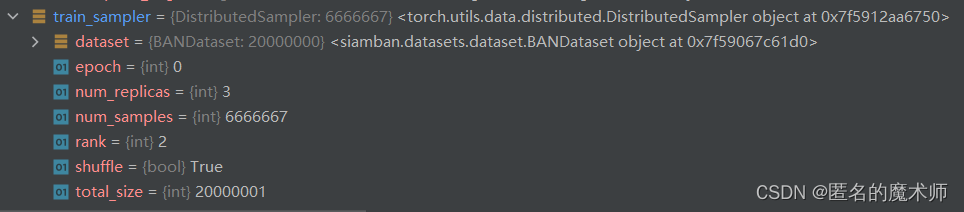
train_sampler
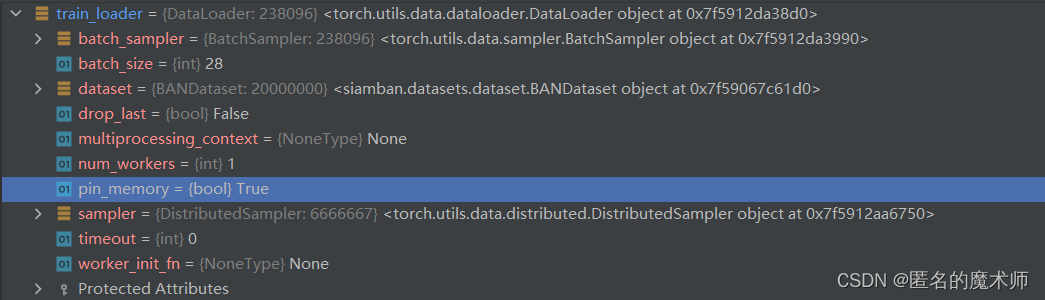
train_loader
(4) build_opt_lr
model




param

m
trainable_params (first)

trainable_params (second)

trainable_params (third)

optimizer

lr_scheduler (first)

lr_scheduler (second)

2. model_load.py
(1) def load_pretrain
第一个
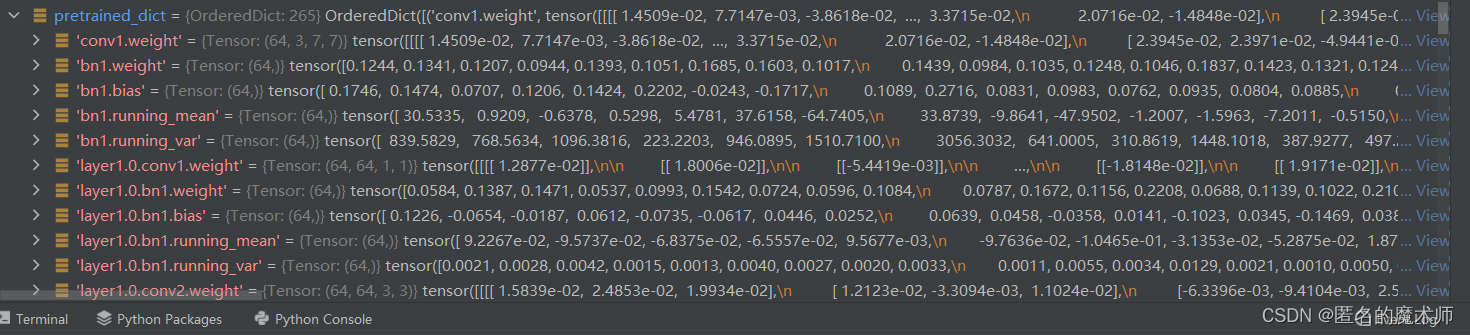
经过remove_prefix后

(2) def remove_prefix

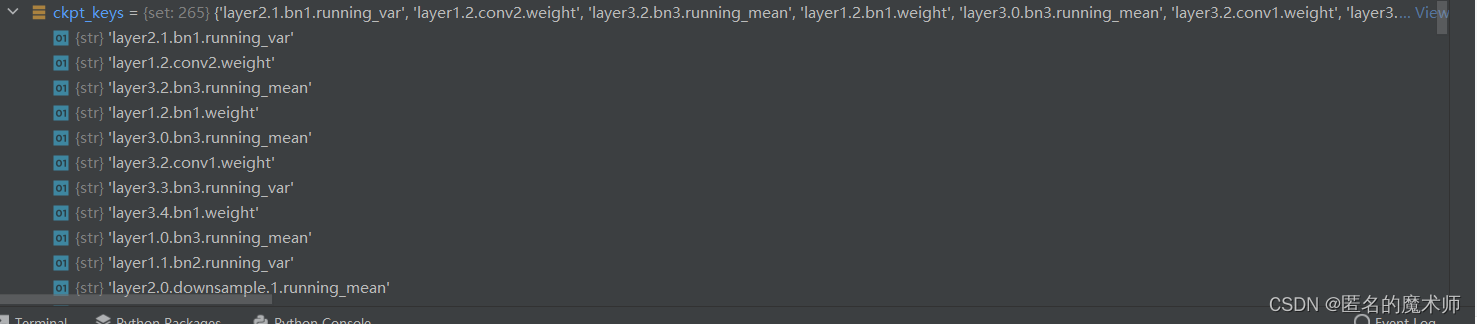
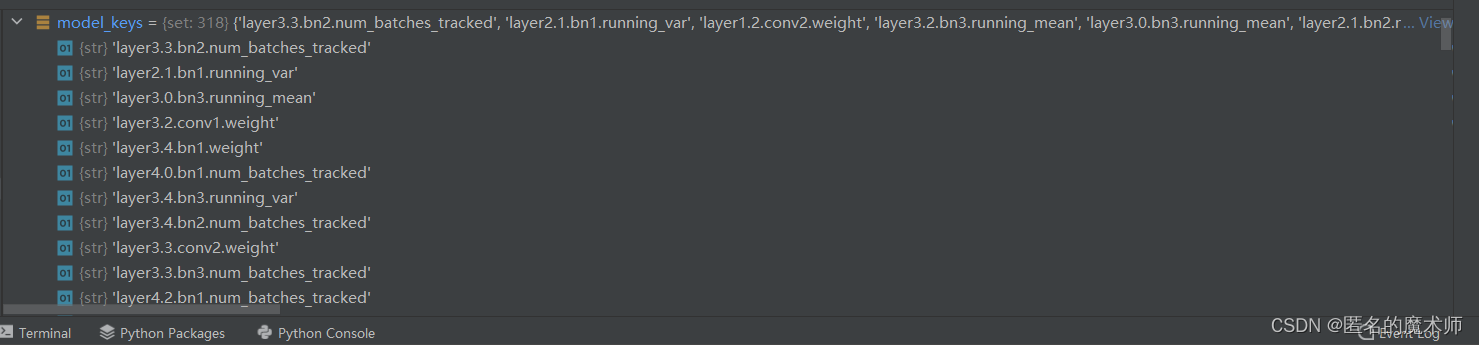
(3) def check_keys
ckpt_keys
model_keys
used_pretrainde_keys
unused_pretrained_keys

missing_keys (first)
missing_keys (secend)

3. dataset.py
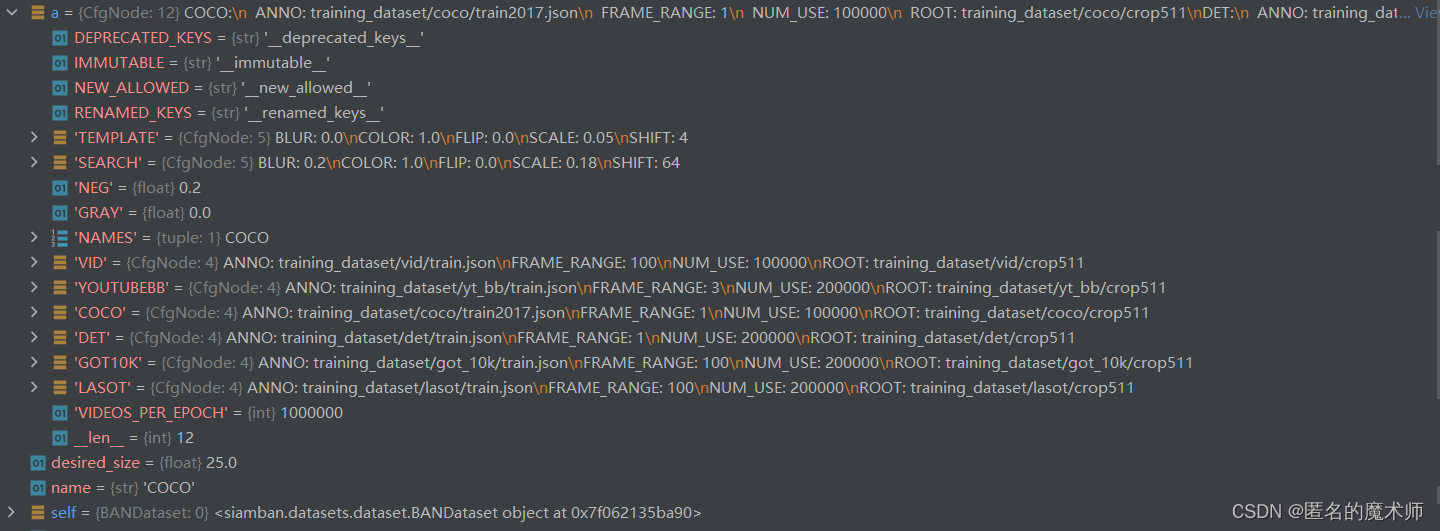
(1) class BANDataset(Dataset)
cfg.DATASET
《config文件中的设置》
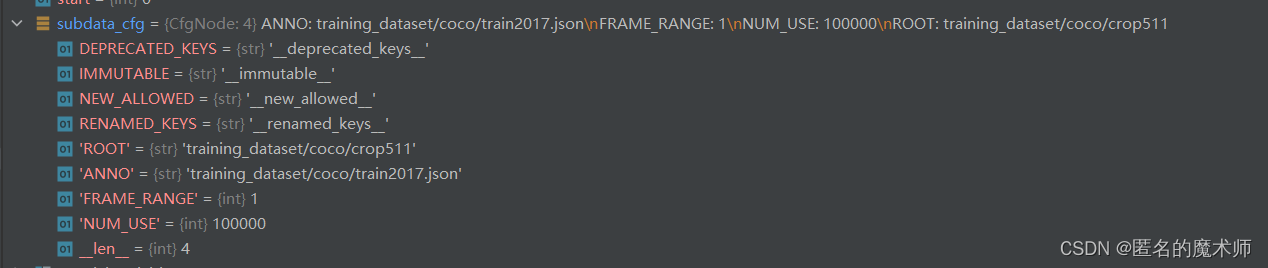
subdata_cfg
self.all_dataset

self.pick

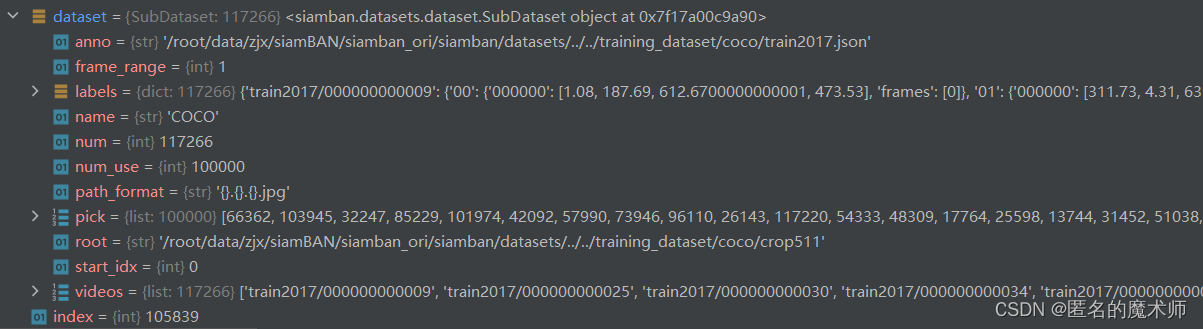
dataset
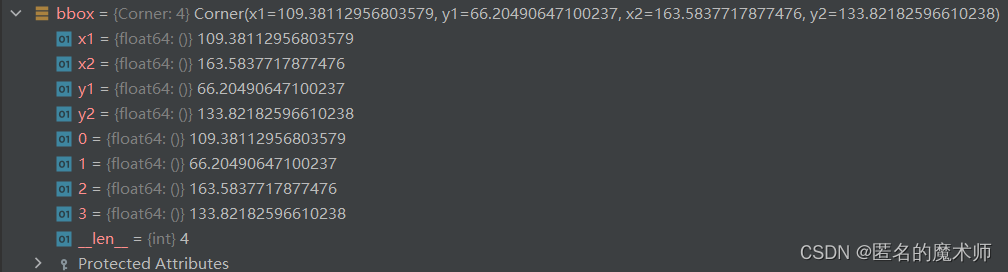
bbox
def shuffle
p, pick
《第一次循环》
《循环结束后》
(2)class SubDataset(object)
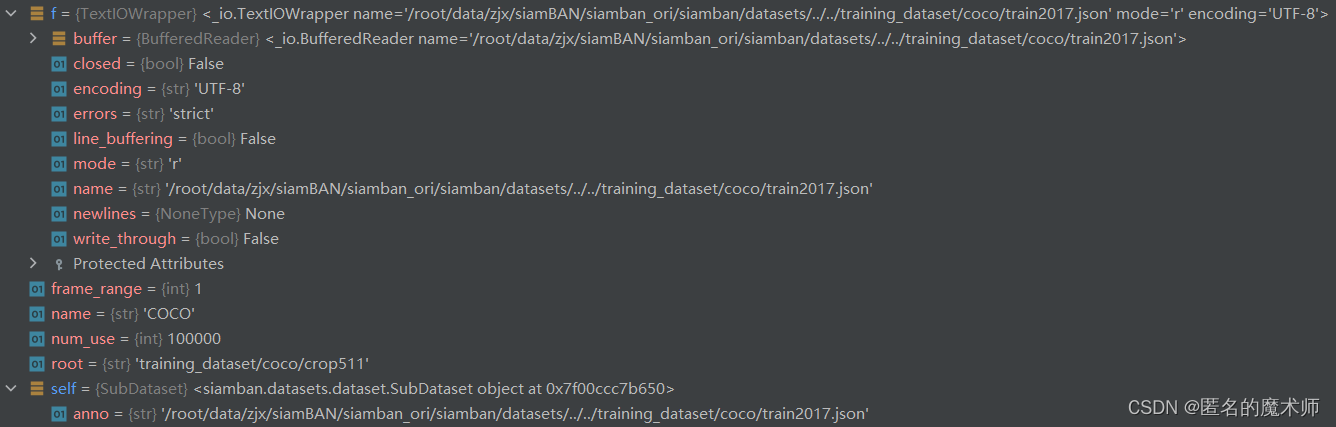
f
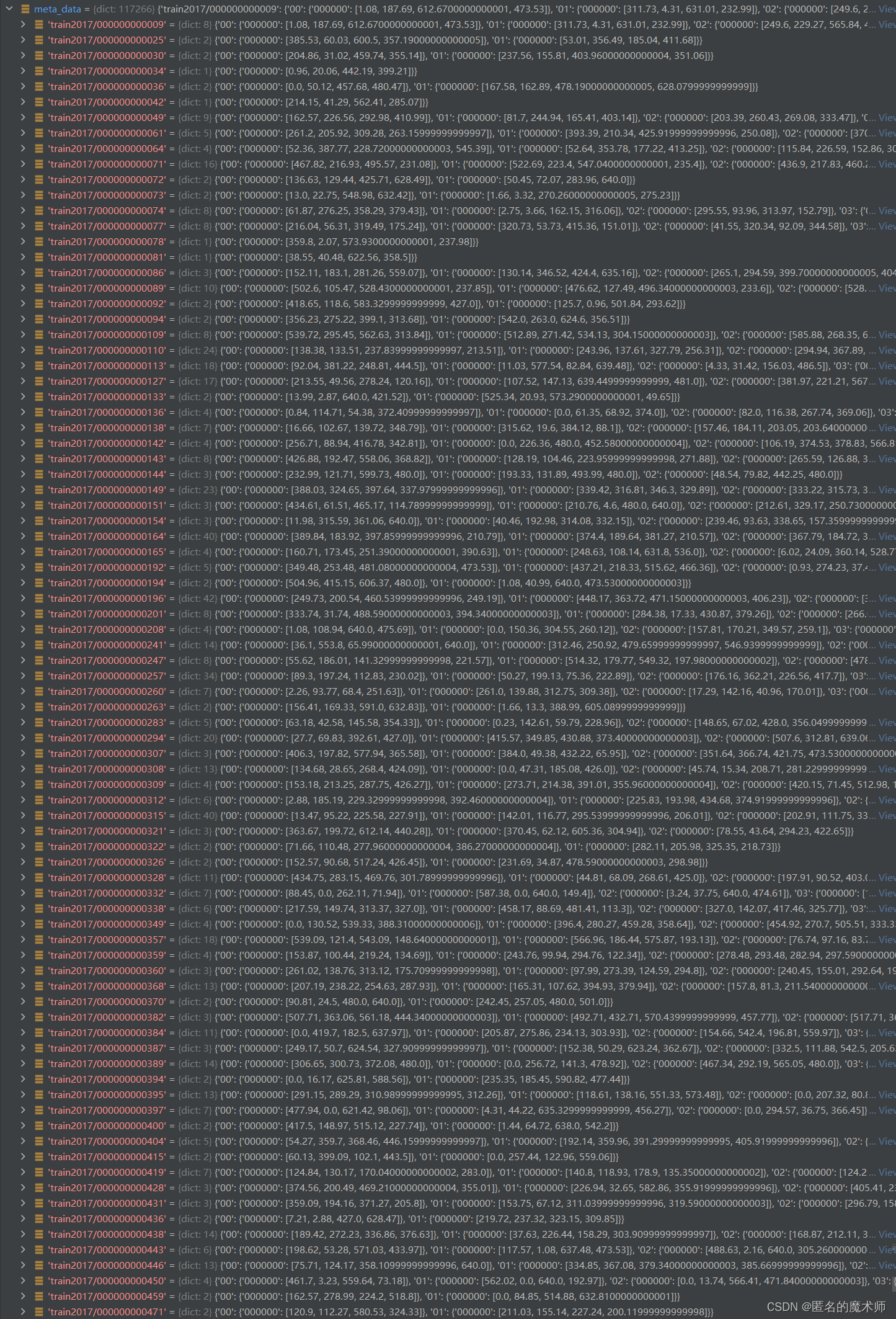
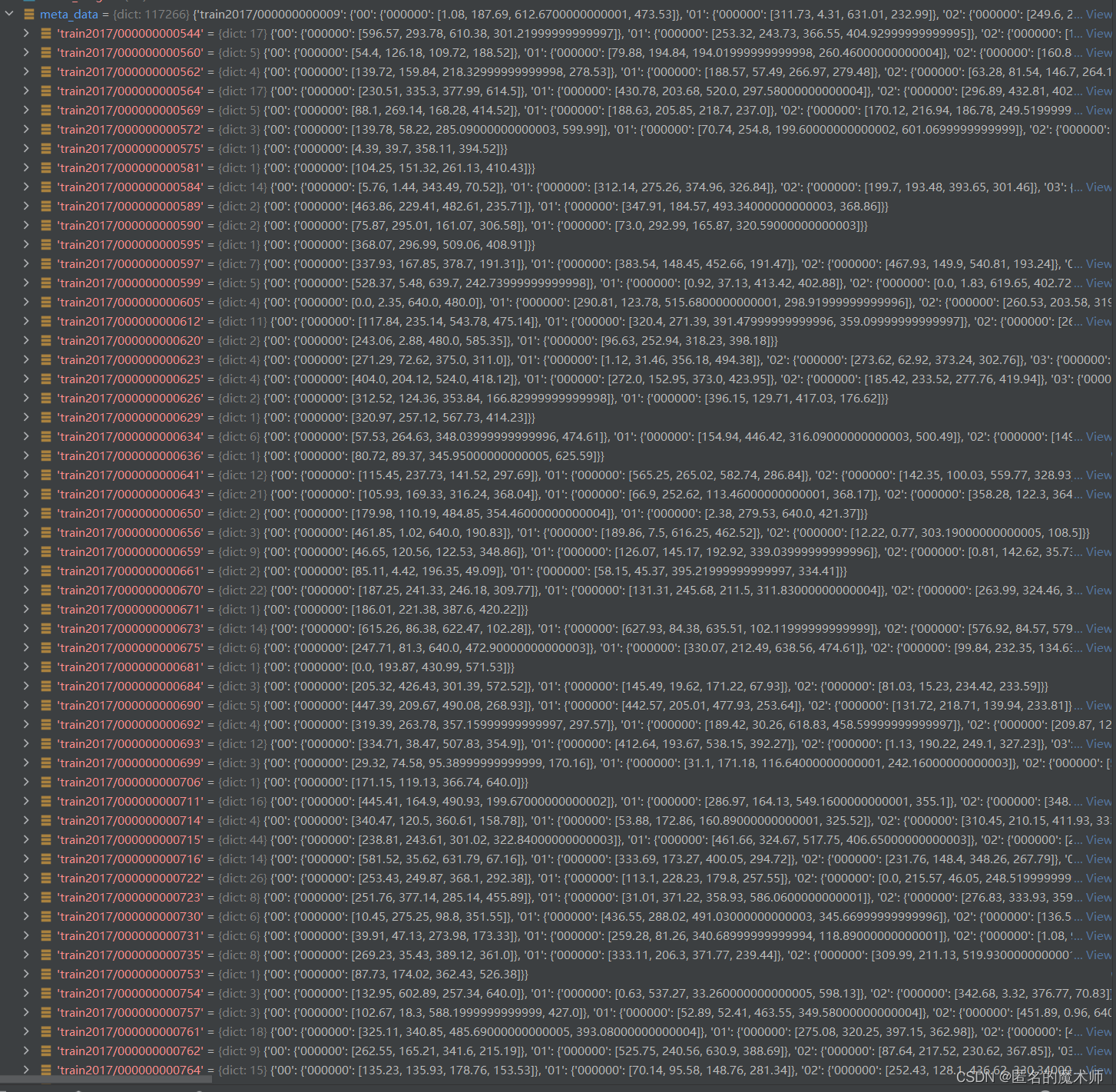
meta_data (太长了,没截图完) first
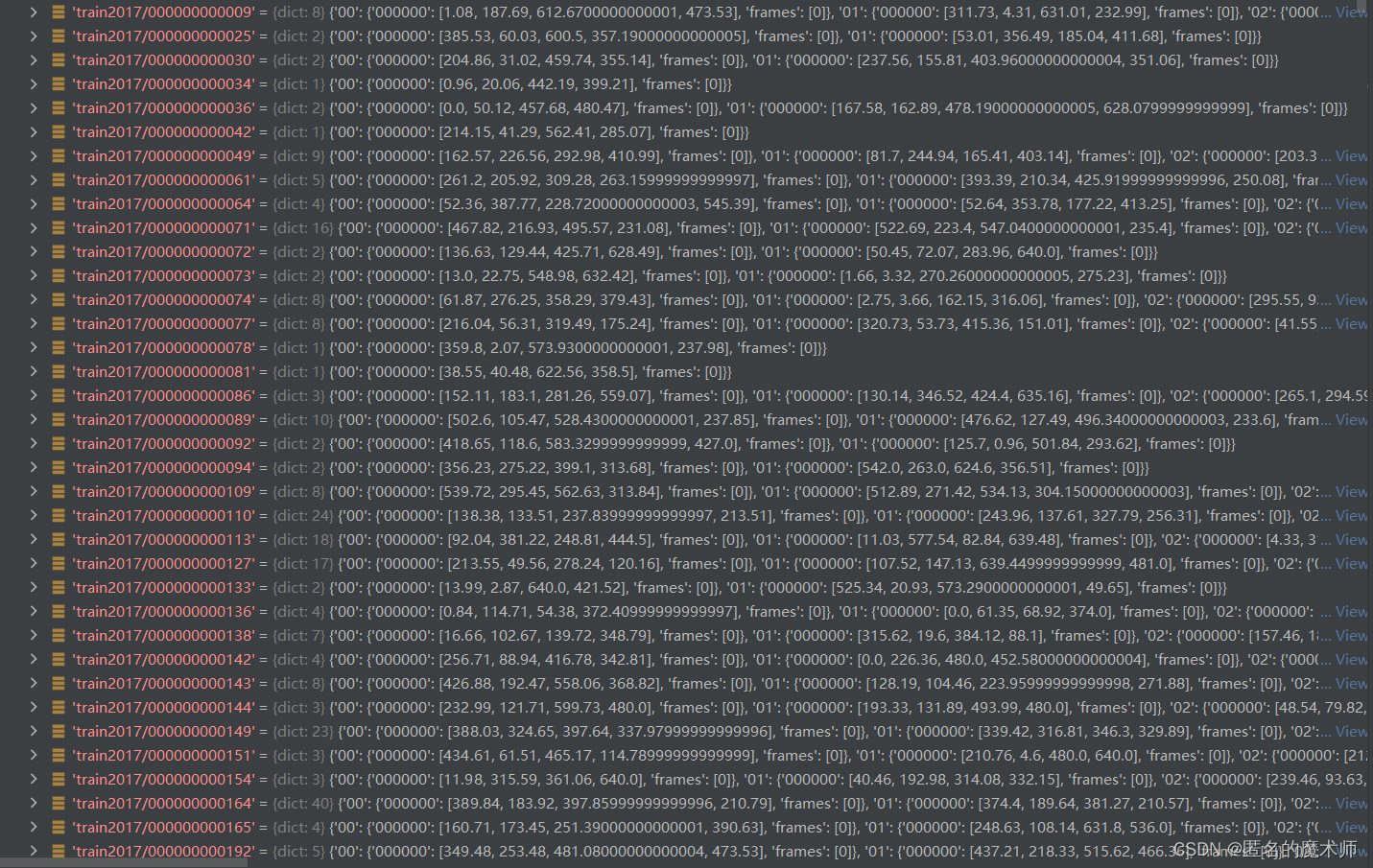
meta_data (second,经过_filter_zero之后的)
self.labels
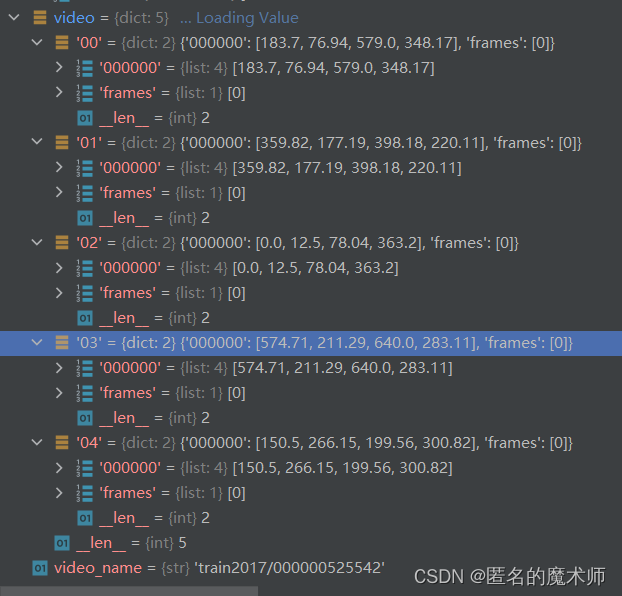
self.videos
template

search

template_box
search_box
(3)def _filter_zero-->class SubDataset(object)
tracks

(4) def shuffle-->class SubDataset(object)
list
(5) def _find_dataset--> class BANDataset(Dataset)
dataset
(6) def get_positive_pair-->class SubDataset(object)
self
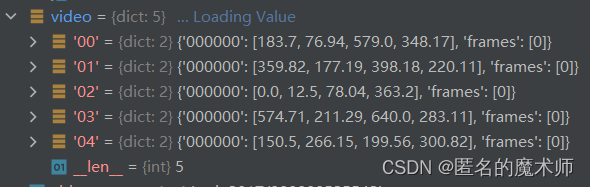
video
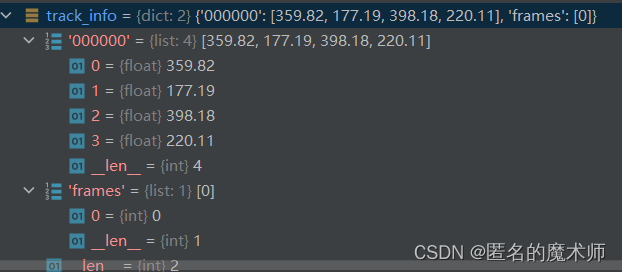
track_info
(7) _get_bbox--> class BANDataset(Dataset)
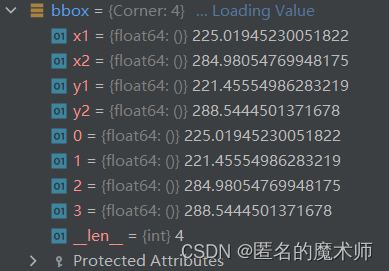
bbox
4. lr_scheduler.py
(1) def _build_warm_up_scheduler
sc1

sc2

(2) class WarmUPScheduler
warmup

normal

self.lr_spaces

5.distributed.py
(1) class DistModule
self.module

(2) broadcast_params
p

6. model_builder.py
data

template
search
label_cls
label_loc
zf

xf

zf (neck)

xf (neck)

cls
loc
cls (log_softmax)
cls_loss
loc_loss
7. augmentation.py
(1) def __call__
corp_bbox
bbox
(2) _shift_scale_aug
crop_bbox_center (first)
crop_bbox_center (second)
crop_bbox
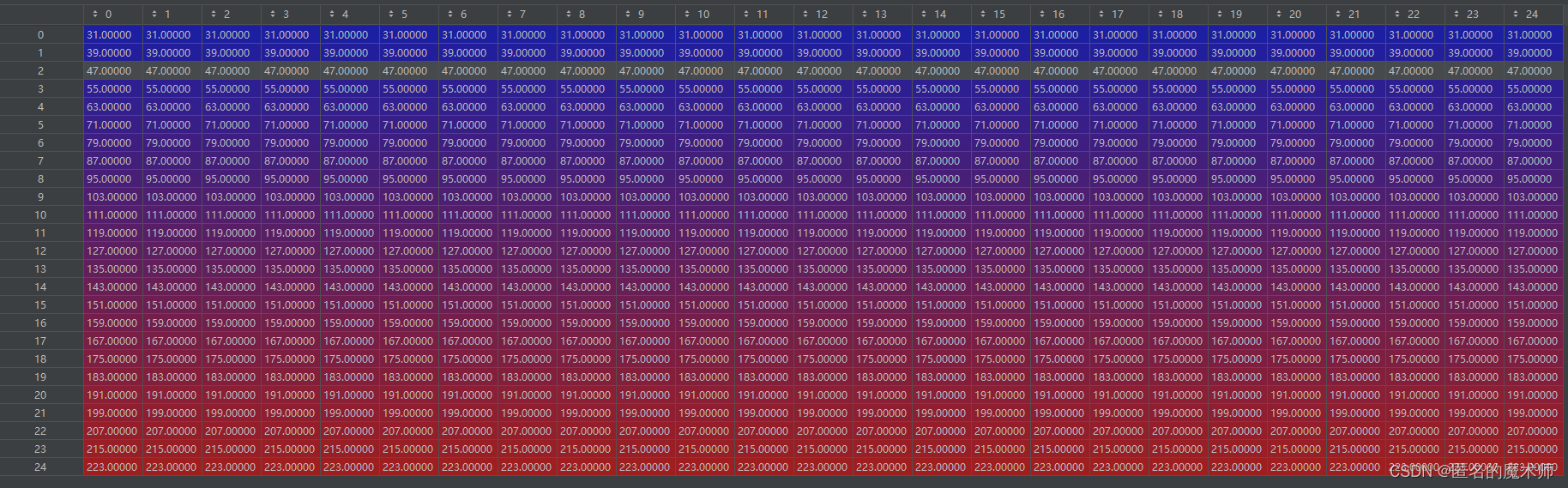
8.point_target.py
self.point

points
[0]
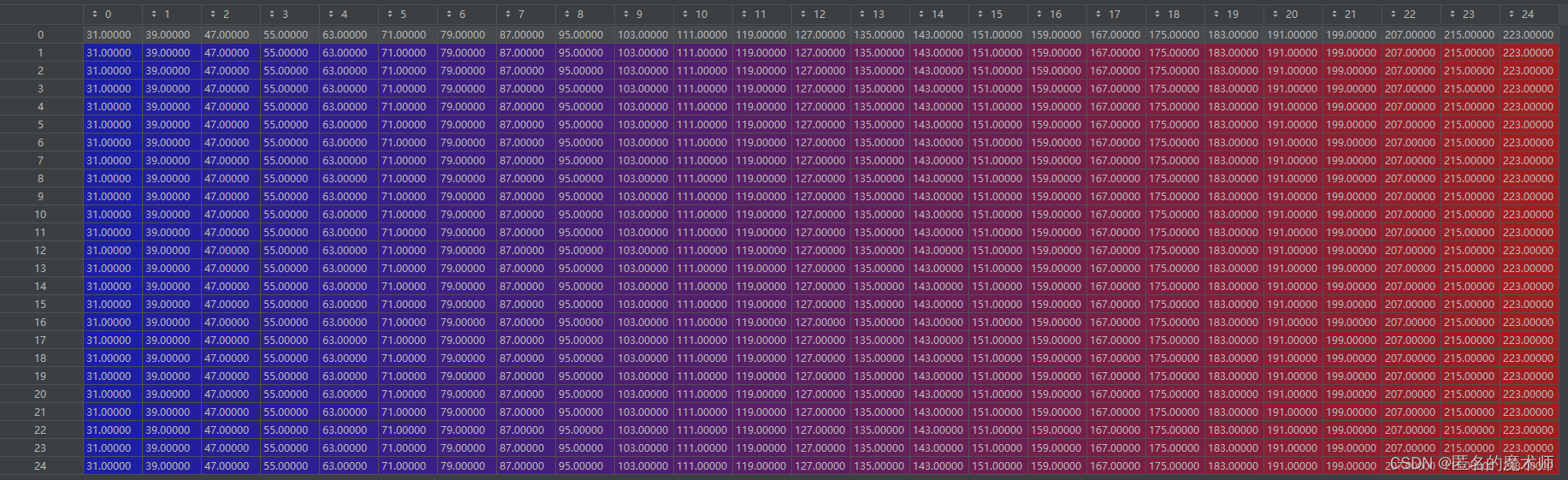
[1]
cls (first)
delta (first)

delta (second)
[0]
[1]
[2]
[3]
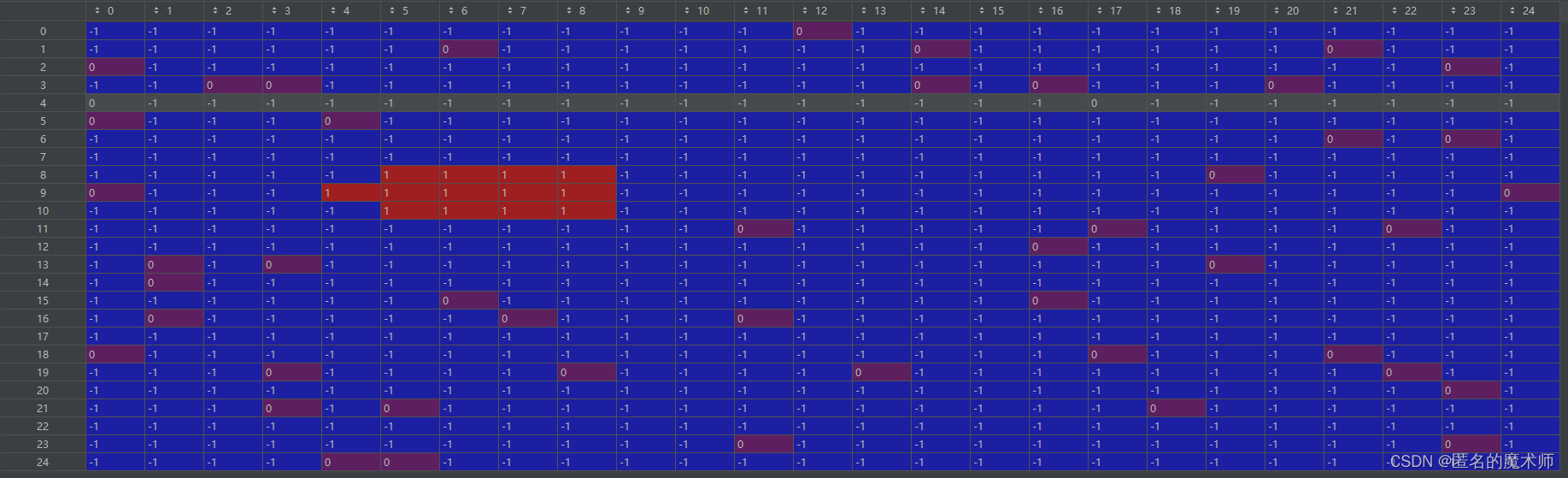
pos

neg

position

cls(second)
二、一些关键部分的入口以及代码
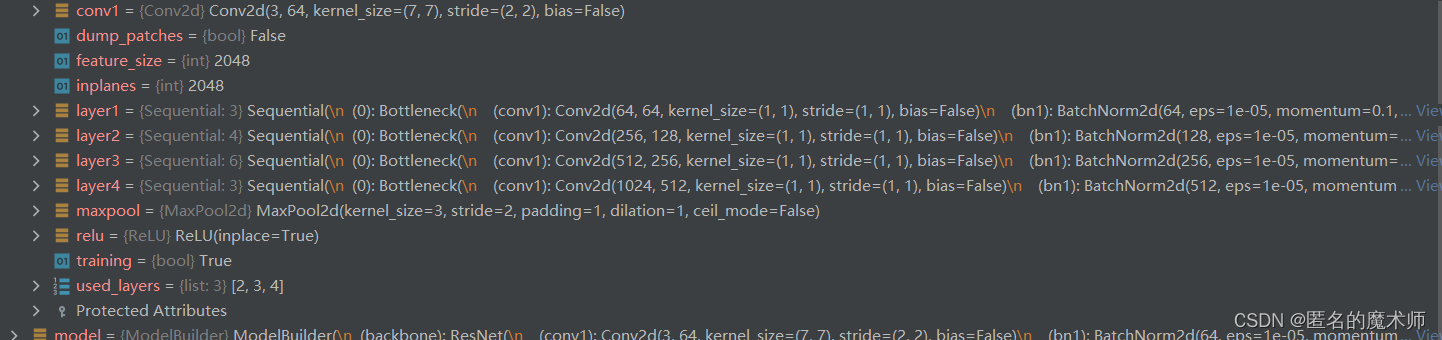
1. 搭建主干网络以及构造模型
train.py------- 267
model = ModelBuilder().cuda().train()2. 加载Rsnet预训练骨干的参数
train.py-----271
if cfg.BACKBONE.PRETRAINED: # True
cur_path = os.path.dirname(os.path.realpath(__file__)) # cur_path: '/root/data/zjx/siamBAN/siamban_ori/tools'
backbone_path = os.path.join(cur_path, '../', cfg.BACKBONE.PRETRAINED) # backbone_path:'/root/data/zjx/siamBAN/siamban_ori/tools/../pretrained_models/resnet50.model'
load_pretrain(model.backbone, backbone_path)3. 建立dataset loader
train.py----283
train_loader = build_data_loader()4. 导入数据集的入口
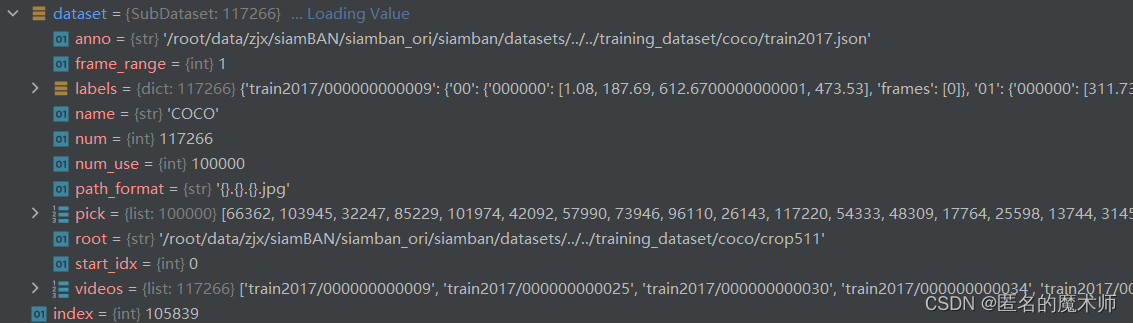
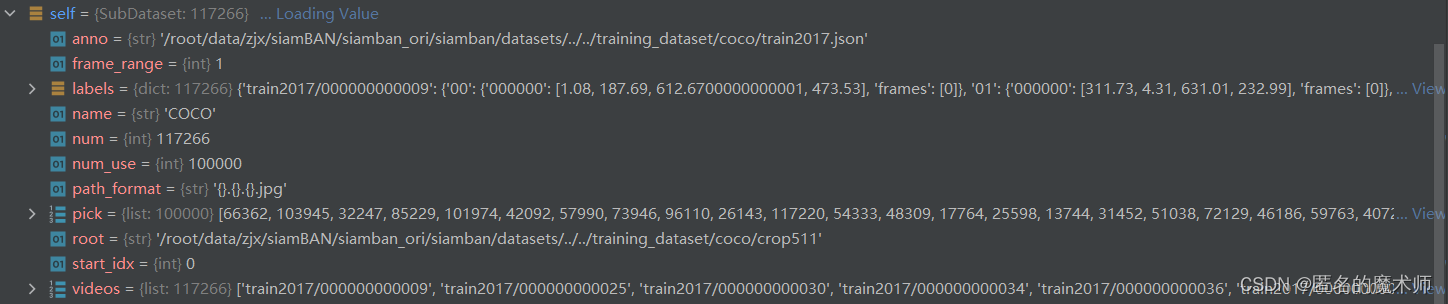
dataset.py -----160
for name in cfg.DATASET.NAMES: # name: 'COCO' 这个就是拿出数据集的地方更精确一点,裁剪后的数据集路径为
dataset.py -----34
self.root = os.path.join(cur_path, '../../', root) # '/root/data/zjx/siamBAN/siamban_ori/siamban/datasets/../../training_dataset/coco/crop511'5. 训练时打印的出处
(1) 刚开始准备的阶段
“======================”
{'000000':[1.08,187.69,612.6700000000001,473.53]}
“======================”dataset.py-----73
for trk, frames in tracks.items(): # trk={str}'00' frames={dict:1}{'000000':[1.08,187.69,612.6700000000001,473.53]}
print("===================")
print(frames)
print("===================")这些都是准备阶段,还没开始对数据集进行训练呢。
(2) 开头时打印的config内容
train.py-----264
logger.info("config \n{}".format(json.dumps(cfg, indent=4)))(3) Epoch 啥的
train.py-----241
for cc, (k, v) in enumerate(batch_info.items()): # cc:索引, (k,v)与之前的一样
if cc % 2 == 0:
info += ("\t{:s}\t").format(
getattr(average_meter, k)) # ’Epoch:[1][20/17857] lr:0.0010000\n\tbatch_time:1.308527(1.368259)\t‘
else:
info += ("{:s}\n").format(
getattr(average_meter, k)) # ’Epoch:[1][20/17857] lr:0.0010000\n\tbatch_time:1.308527(1.368259)\tdata_time:0.488958(0.661270)\n‘
logger.info(info)(4) progress 啥的

log_helper.py-----102
logger.info('Progress: %d / %d [%d%%], Speed: %.3f s/iter, ETA %d:%02d:%02d (D:H:M)\n' %
(i, n, i / n * 100,
average_time,
remaining_day, remaining_hour, remaining_min))(5) 模型的模块结构
train.py-----166
logger.info("model\n{}".format(describe(model.module)))6. 数据送入模型的入口
train.py-----202
outputs = model(data)7. 分类标签和回归标签的创建
dataset.py-----272
cls, delta = self.point_target(bbox, cfg.TRAIN.OUTPUT_SIZE, neg)8. 损失函数的使用
module_builder.py-----93
cls = self.log_softmax(cls) # 先取softmax然后再log,值都为负数, Tensor:(28,25,25,2) <c>
cls_loss = select_cross_entropy_loss(cls, label_cls) # <c> 一个数 tensor(0.7612)
# loc loss with iou loss
loc_loss = select_iou_loss(loc, label_loc, label_cls)9. 原输入图片为(511,511,3),resize到输入网络的尺寸的入口
dataset.py----261
template, _ = self.template_aug(template_image,
template_box,
cfg.TRAIN.EXEMPLAR_SIZE,
gray=gray) # ndarry:(127,127,3)
search, bbox = self.search_aug(search_image,
search_box,
cfg.TRAIN.SEARCH_SIZE,
gray=gray)augmentation.py-----126
image, bbox = self._shift_scale_aug(image, bbox, crop_bbox, size)10.正样本随机选16个,负样本随机选48个入口
point_target.py---23
def select(position, keep_num=16): # keep_num 16 或 48
num = position[0].shape[0] # 举例 569
if num <= keep_num:
return position, num
slt = np.arange(num) # 举例 ndarray:(569:) [0~568]
np.random.shuffle(slt) # 打乱
slt = slt[:keep_num] # ndarray:(48,)
return tuple(p[slt] for p in position), keep_num11. 输入shape 通道转成对应的3通道 (3,255,255)以及(3,127,127)入口
dataset.py----273
template = template.transpose((2, 0, 1)).astype(np.float32) # ndarray:(3,127,127)
search = search.transpose((2, 0, 1)).astype(np.float32) 12 日志文件创建入口
train.py-----259
if cfg.TRAIN.LOG_DIR: # True
add_file_handler('global',
os.path.join(cfg.TRAIN.LOG_DIR, 'logs.txt'),
logging.INFO)13. 更改数据集导入路径啥的设置
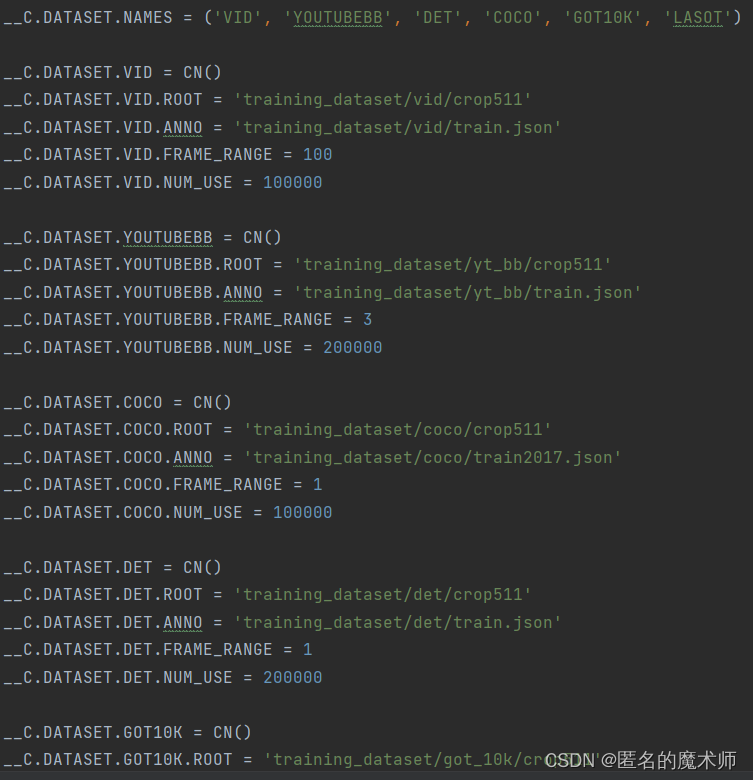
config.py-----129
__C.DATASET.NAMES = ('VID', 'YOUTUBEBB', 'DET', 'COCO', 'GOT10K', 'LASOT')
__C.DATASET.VID = CN()
__C.DATASET.VID.ROOT = 'training_dataset/vid/crop511'
__C.DATASET.VID.ANNO = 'training_dataset/vid/train.json'
__C.DATASET.VID.FRAME_RANGE = 100
__C.DATASET.VID.NUM_USE = 100000
__C.DATASET.YOUTUBEBB = CN()
__C.DATASET.YOUTUBEBB.ROOT = 'training_dataset/yt_bb/crop511'
__C.DATASET.YOUTUBEBB.ANNO = 'training_dataset/yt_bb/train.json'
__C.DATASET.YOUTUBEBB.FRAME_RANGE = 3
__C.DATASET.YOUTUBEBB.NUM_USE = 200000
__C.DATASET.COCO = CN()
__C.DATASET.COCO.ROOT = 'training_dataset/coco/crop511'
__C.DATASET.COCO.ANNO = 'training_dataset/coco/train2017.json'
__C.DATASET.COCO.FRAME_RANGE = 1
__C.DATASET.COCO.NUM_USE = 100000
__C.DATASET.DET = CN()
__C.DATASET.DET.ROOT = 'training_dataset/det/crop511'
__C.DATASET.DET.ANNO = 'training_dataset/det/train.json'
__C.DATASET.DET.FRAME_RANGE = 1
__C.DATASET.DET.NUM_USE = 200000
__C.DATASET.GOT10K = CN()
__C.DATASET.GOT10K.ROOT = 'training_dataset/got_10k/crop511'
__C.DATASET.GOT10K.ANNO = 'training_dataset/got_10k/train.json'
__C.DATASET.GOT10K.FRAME_RANGE = 100
__C.DATASET.GOT10K.NUM_USE = 200000
__C.DATASET.LASOT = CN()
__C.DATASET.LASOT.ROOT = 'training_dataset/lasot/crop511'
__C.DATASET.LASOT.ANNO = 'training_dataset/lasot/train.json'
__C.DATASET.LASOT.FRAME_RANGE = 100
__C.DATASET.LASOT.NUM_USE = 200000
__C.DATASET.VIDEOS_PER_EPOCH = 100000014. 截取训练数据的入口
训练数据所用的图片(这里对应处理前的单张图片,处理后成为一个文件夹,依据所包含目标数量多少下面可能包含多张图片)的数量为设置的,self.use_num,若大于这个数则随机截取,小于这个则随机会重复选取直至满足
dataset.py-----66 、98
self.pick = self.shuffle() def shuffle(self):
lists = list(range(self.start_idx, self.start_idx + self.num)) # {list:117266} 从0到117265,并且转成列表 <c>
pick = []
while len(pick) < self.num_use: # 小于 使用的数量则循环 。若self.num_use小于lists 的长度则一次循环结束,截取这么长;若大于,则循环执行直至满足
np.random.shuffle(lists) # 随机打乱列表中的 索引顺序
pick += lists
return pick[:self.num_use]15 .最终训练数据的每轮epoch的大小
可以一次性使用多个训练数据集,因为每轮epoch的总batch训练大小为20000000个,个数不够循环来凑。
dataset.py-----198
def shuffle(self):
pick = []
m = 0
while m < self.num: # 当m 小于时一直执行这个循环
p = []
for sub_dataset in self.all_dataset:
sub_p = sub_dataset.pick # {list:100000}
p += sub_p # 如果是单个数据集的话,p每次都是那些
np.random.shuffle(p)
pick += p
m = len(pick)
logger.info("shuffle done!")
logger.info("dataset length {}".format(self.num))
return pick[:self.num]16 . 保存模型参数
train.py -----172
if get_rank() == 0: # 只在进程0上保存就行了,避免重复,而且保存的参数为 model.module
torch.save(
{'epoch': epoch,
'state_dict': model.module.state_dict(),
'optimizer': optimizer.state_dict()},
cfg.TRAIN.SNAPSHOT_DIR+'/checkpoint_e%d.pth' % (epoch))三、 网络结构
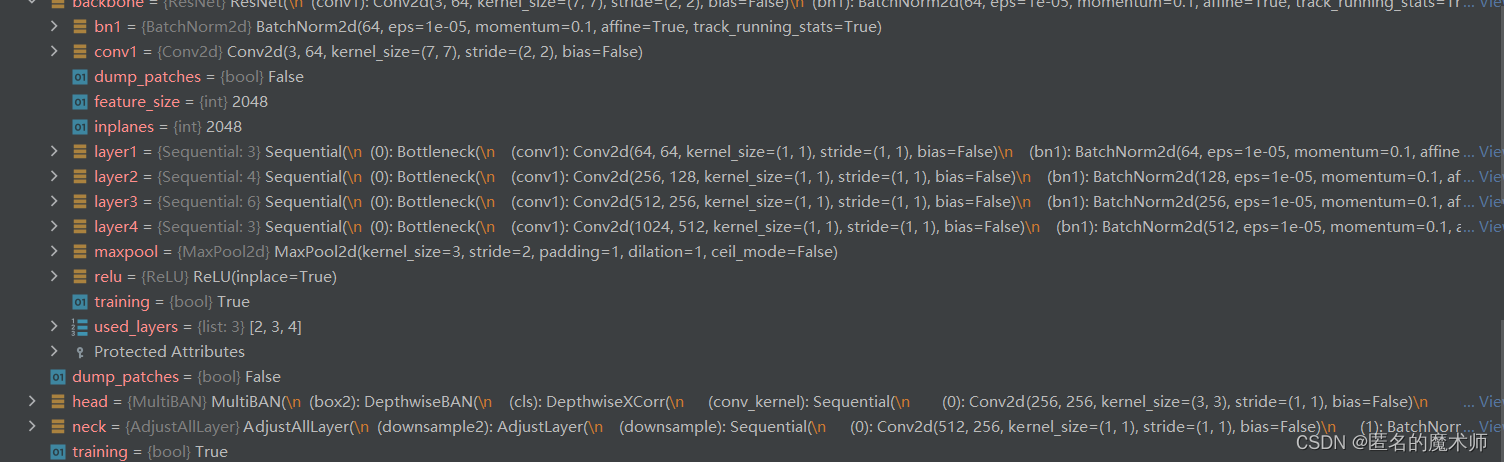
ModelBuilder(
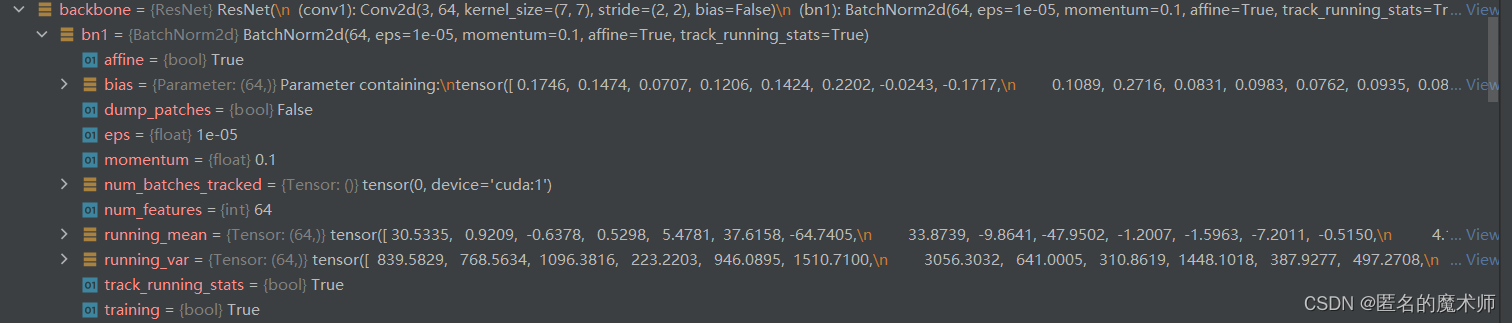
(backbone): ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(2, 2), dilation=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(4, 4), dilation=(4, 4), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(4, 4), dilation=(4, 4), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
)
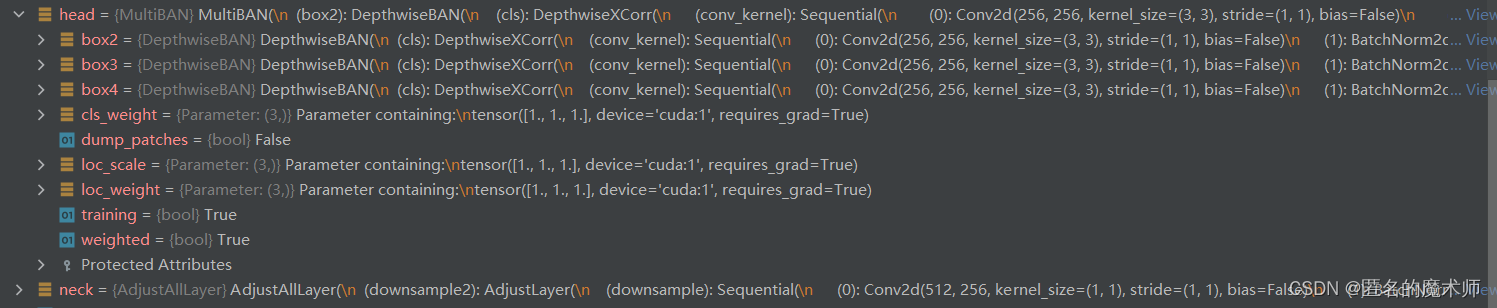
(neck): AdjustAllLayer(
(downsample2): AdjustLayer(
(downsample): Sequential(
(0): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(downsample3): AdjustLayer(
(downsample): Sequential(
(0): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(downsample4): AdjustLayer(
(downsample): Sequential(
(0): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
)
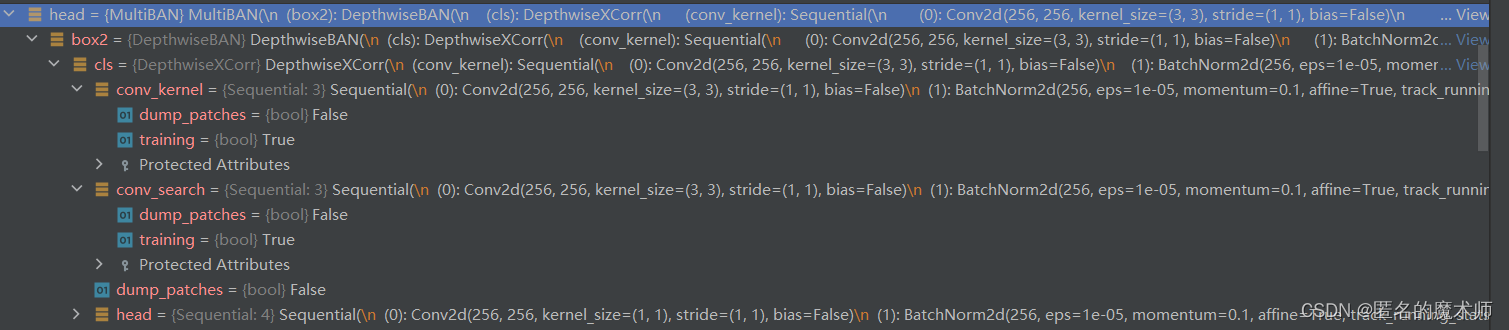
(head): MultiBAN(
(box2): DepthwiseBAN(
(cls): DepthwiseXCorr(
(conv_kernel): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(conv_search): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(head): Sequential(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 2, kernel_size=(1, 1), stride=(1, 1))
)
)
(loc): DepthwiseXCorr(
(conv_kernel): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(conv_search): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(head): Sequential(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 4, kernel_size=(1, 1), stride=(1, 1))
)
)
)
(box3): DepthwiseBAN(
(cls): DepthwiseXCorr(
(conv_kernel): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(conv_search): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(head): Sequential(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 2, kernel_size=(1, 1), stride=(1, 1))
)
)
(loc): DepthwiseXCorr(
(conv_kernel): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(conv_search): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(head): Sequential(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 4, kernel_size=(1, 1), stride=(1, 1))
)
)
)
(box4): DepthwiseBAN(
(cls): DepthwiseXCorr(
(conv_kernel): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(conv_search): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(head): Sequential(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 2, kernel_size=(1, 1), stride=(1, 1))
)
)
(loc): DepthwiseXCorr(
(conv_kernel): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(conv_search): Sequential(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
)
(head): Sequential(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 4, kernel_size=(1, 1), stride=(1, 1))
)
)
)
)
)















 384
384











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











