









 本文档详细介绍了如何在ROS1环境下改编和运行原本基于ROS2.0的SOFA(SimulationOpenFrameworkArchitecture)示例。作者首先概述了官方示例的步骤,然后详细阐述了配置SOFA、Python和ROS环境的过程,包括修改环境变量和启动文件。接着,作者展示了如何将ROS2.0的代码转换为ROS1.0,包括修改`recv.py`和仿真文件`test_sofaros.py`以及`sofaros.py`。最后,文章描述了成功运行改编后示例的步骤,验证了ROS中的通信功能。
本文档详细介绍了如何在ROS1环境下改编和运行原本基于ROS2.0的SOFA(SimulationOpenFrameworkArchitecture)示例。作者首先概述了官方示例的步骤,然后详细阐述了配置SOFA、Python和ROS环境的过程,包括修改环境变量和启动文件。接着,作者展示了如何将ROS2.0的代码转换为ROS1.0,包括修改`recv.py`和仿真文件`test_sofaros.py`以及`sofaros.py`。最后,文章描述了成功运行改编后示例的步骤,验证了ROS中的通信功能。
本篇将学一学在ROS中使用SOFA的方法
官方文档中有使用ROS2.0的案例,但是我的电脑装的是ROS,所以在探索这个示例的使用方法之前还要先把ROS2.0的代码转写到ROS。(愁人)
一、官方示例
示例位置:Sofa_python3.8/plugins/SoftRobots/docs/sofapython3/examples/sofaros
打开readme.html:
上文内容:
(实际操作看下面 一节,我从一开始就是直接打开软件用的,所以有些环境没配置好,将在下面的“1.1 前期准备”中讲一下怎么配置)
需要的环境为:
- 安装了python3
- 有python3版本插件的sofa
- 以及ROS2.0;(本笔记的系统为ubuntu20.04,极其不建议使用Windows,因为多半不好设环境)
使用步骤:
4. 然后开俩终端,都执行 “source ros2”,
5. 第一个终端执行 “python recv.py”, 该文件的作用应该是作为信息中转站,转发订阅信息。
6. 在第二个终端中执行 “runSofa test_sofaros.py”, 该示例是由两个MechanicalObject组成的简单场景,其中一个可以用鼠标交互操作。这个MechanicalObject的数据位置被发布为ros主题“/simulation/sender/position”,使用专用的RosSender (python脚本控制器)。
7. recv被订阅到这个发布的ros主题“/simulation/sender/position”run
1.1 前期准备
1.1.1 Sofa相关配置
首先,想在ROS环境中运行sofa,就希望能够在shell里打开sofa。(在官方基础教程里有在终端里用命令打开sofa的方法,但我之前懒,给sofa创建了一个图标之后就没有使用终端了。。。)这里介绍一下我的相关配置过程。
参考文章:
win11下,SOFA v19(python2)和v21(python3)双版本共存的相关配置
官方配置教程
第一步,将启动文件 runSofa 所在路径添加到系统路径中,这样每次在终端中使用 runSofa 时就不需要先定位到它所在的文件夹了。操作过程:
- 在终端中输入:
sudo gedit ~/.bashrc打开当前用户的配置文件,(如果要为所有用户配置,则打开 .profile文件),(如果不习惯gedit, 用vim, nano等对文件进行编辑也可以,我懒,用gedit)。 - 在打开的 .bashrc 文件末尾添加:
export PATH=$PATH:/home/zf/Software/Sofa_0328/bin,然后保存文件(先别关闭文件,下一步还要往里加路径) - 在终端中执行以下命令,使刚才做的修改生效:
source ~/.bashrc - 完成,在配置完成后打开新的终端,就可以在任意位置使用 runSofa 了
第二步,为Sofa 配置环境变量,包括两部分:SOFA_ROOT, PYTHONPATH:
- 在 .bashrc 文件末尾添加:
# <<< sofa initialize <<<
export SOFA_ROOT=/home/zf/Software/Sofa_0328
export PYTHONPATH=$PYTHONPATH:$SOFA_ROOT/plugins/SofaPython3/lib/python3/site-packages:$SOFA_ROOT/plugins/SoftRobots/lib/python3/site-packages
- 这里的 /home/zf/Software/Sofa_0328 是我的 sofa 安装路径,可根据实际情况进行更改(这里安装路径已经和前几篇不一样了,因为我把安装包里某些文件搞坏了,又重新下载了一版);
- PYTHONPATH 后面添加的是我这边 SofaPython3 和 SoftRobots 两个插件的 python3/site-packages 所在位置
- 在终端中执行以下命令,使刚才做的修改生效:
source ~/.bashrc - 完成配置
SOFA这边要做的配置就结束了。可以使用以下命令打开 示例里或之前自己编写的 .py仿真场景文件,举例:首先定位到 .py文件所在目录(这里的cd后面的路径要修改为实际路径),然后用 runSofa 运行py文件:
$ cd ~/Sofa_0328/plugins/SoftRobots/docs/sofapython3/tutorials/CableGripper/details
$ runSofa cablegripper.py
1.1.2 python相关配置
大概能安装好python3就行,我没有对之前的python环境做过什么更改,将上一小节配置好就可以在终端通过runSofa运行py文件了。
我还想在pycharm中写代码时也能支持Sofa库的索引,在第一篇笔记中的操作方法是将库的路径添加到pycharm项目的内容根里,每新建一个项目都要重新配置,太麻烦了,于是考虑把这个sofa库的路径初始化添加到pycharm的启动文件中。方法如下:
- 定位到pycharm的启动文件所在位置,其中bin前面的路径要根据pycharm的实际安装路径修改:
cd /home/zf/Software/pycharm-community-2023.2.5/bin
- 打开pycharm.sh文件:
sudo gedit pycharm.sh
- 将上一部添加到 .bashrc中的路径也添加到 pycharm.sh中:
# >>> sofa initialize and path >>>
export export PATH=$PATH:/home/zf/Software/SOFA_v22/bin
export SOFA_ROOT=/home/zf/Software/SOFA_v22
export PYTHONPATH=$PYTHONPATH:$SOFA_ROOT/plugins/SofaPython3/lib/python3/site-packages:$SOFA_ROOT/plugins/SoftRobots/lib/python3/site-packages
添加在下面这部分的上面:
# ---------------------------------------------------------------------
# Run the IDE.
# ---------------------------------------------------------------------
添加后长这样:
# >>> sofa initialize and path >>>
export export PATH=$PATH:/home/zf/Software/SOFA_v22/bin
export SOFA_ROOT=/home/zf/Software/SOFA_v22
export PYTHONPATH=$PYTHONPATH:$SOFA_ROOT/plugins/SofaPython3/lib/python3/site-packages:$SOFA_ROOT/plugins/SoftRobots/lib/python3/site-packages
# ---------------------------------------------------------------------
# Run the IDE.
# ---------------------------------------------------------------------
- 保存后关闭,再打开pycharm就可以引用Sofa的库了
1.1.3 ROS相关配置
ROS的安装这里不多赘述,CSDN上可以找到好多靠谱的安装教程。
如果没建过ROS工作空间要先创建工作空间,简单说一下创建过程,遇到bug百度解决。
- 创建工作空间的路径:
$ mkdir -p ~/catkin_ws/src # 创路径,catkin_ws可自定名称,但src一定要有
$ cd ~/catkin_ws/src # 进入路径
$ catkin_ini_workspace # 工作空间初始化,把该文件夹定义为工作空间的属性
- 编译工作空间:
$ cd ~/catkin_ws/ # 换到根路径
$ catkin_make # 对该目录进行编译,编译之后要设置环境变量
$ catkin_make install # 编译出install文件夹
- 设置环境变量:
在终端中使用source命令设置的环境变量只能在当前终端生效,若要在所有终端生效,则需要在终端配置文件中加入环境变量的设置:
$ echo "source /WORKSPACE/devel/setup.bash">>~/.bashrc$ source devel/setup.bash
- 检查环境变量:
$ echo $ROS_PACKAGE_PATH #如果打印的路径中已经包含当前工作空间的路径,则说明环境变量设置成功
然后,创建好工作空间后,在工作空间中创建功能包:
$ catkin_create_pkg <pkg_name> [depend1] [depend2] [depend3]
e.g. (同一个工作空间下,不允许存在同名功能包,不同工作空间下,允许存在)
功能包创建好后还要到工作空间路径下进行编译。
示例:
# 创建功能包
$ cd ~/catkin_ws/src # 功能包在代码空间内创建
$ catkin_create_pkg test_pkg std_msgs rospy roscpp
#功能包必须放到src里,后面是该功能包要用到哪些依赖
# std_msgs是ROS定义的标准的数据结构
# 编译功能包
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
1.2 把官方的ROS2.0代码改成ROS
简单看了以下,官方示例中用到的代码用ROS1.0都可以实现,所以想试试改写,实在不行只能再安装ROS2.0了。
Two days later…
可以实现!感动!
因为我对ROS本身就不熟,所以多走了一些弯路,所幸搞出来了。下面是过程:
1.2.1 在Ros工作空间内创建功能包
首先保证已经建好ROS的工作空间,创建过程见上文。
打开新终端,依次执行下面的指令:
$ cd ~/catkin_ws/src
$ catkin_creat_pkg sofaros_test rospy std_msgs
$ cd ../
$ catkin_make
$ source devel/setup.bash
其中第一行要根据自己的ROS工作空间进行调整,我的实际位置不是这个,我的是 ~/Code/catkin_ws/src
创建好功能包后,在sofaros_test文件夹内新建文件夹 scripts, 然后在其中新建三个python文件,并赋予可执行权限。具体操作方式为:
$ cd ~/catkin_ws/src/sofaros_test/
$ mkdir scripts # 在ros工作空间里,为了与放C++代码的文件夹src进行区分,一般会新建一个文件夹scripts
$ cd scripts # 进入该文件夹
$ touch recv.py sofaros.py test_sofaros.py # 新建三个python文件
$ chmod a+x recv.py sofaros.py test_sofaros.py # 给这三个文件赋予可执行权限
随后可以在这个三个文件里写代码了。三个文件对应官方示例的三个同名文件。
1.2.2 改写转发文件 recv.py
首先改写recv.py, 需要改变的比较少,也都是比较基础的代码,就不写注释了。
使用ROS2.0的原文件:
#!/usr/bin/env python
import rclpy
from std_msgs.msg import Float32MultiArray
import sys
pub = None
def callback(data):
global pub
pub.publish(data)
print(data)
if __name__ == '__main__':
rclpy.init(args=sys.argv)
node = rclpy.create_node('listener')
node.get_logger().info('Created node')
sub = node.create_subscription(Float32MultiArray, "/simulation/sender/position", callback, 10)
pub = node.create_publisher(Float32MultiArray, "/animation/receiver/position", 10)
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
改写到ROS1后:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from std_msgs.msg import Float32MultiArray
import sys
pub = None
def callback(data):
global pub
pub.publish(data)
print(data)
if __name__ == '__main__':
rospy.init_node("listener")
sub = rospy.Subscriber("/simulation/sender/position", Float32MultiArray, callback, queue_size=10)
pub = rospy.Publisher("/animation/receiver/position", Float32MultiArray, queue_size=10)
rospy.spin()
rospy.shutdown()
1.2.3 改写仿真文件
a.test_sofaros.py
使用ROS2.0的原文件:
# coding: utf8
import sofaros
from std_msgs.msg import Float32MultiArray # wrapper for ROS primitive types, see : https://github.com/ros2/common_interfaces/tree/master/std_msgs
def send(data):
msg = Float32MultiArray()
msg.data = list(data.value[0])
return msg
def recv(data, datafield):
t = data.tolist()
datafield.value = [[t[0] + 1.0, t[1], t[2]]]
def createScene(rootNode):
rootNode.addObject('RequiredPlugin',
pluginName=["Sofa.Component.ODESolver.Backward", "Sofa.Component.SceneUtility"])
rootNode.addObject("EulerImplicitSolver")
rootNode.addObject("CGLinearSolver", iterations=25, threshold=1e-5, tolerance=1e-5)
rootNode.addObject('DefaultAnimationLoop')
rootNode.addObject('DefaultVisualManagerLoop')
s = rootNode.addChild("simulated")
s.addObject("MechanicalObject", name="sender", position=[0.0, 0.0, 0.0])
s.sender.showObject = True
s.sender.showObjectScale = 1.0
s.sender.drawMode = 1
a = rootNode.addChild("animated")
a.addObject("MechanicalObject", name="receiver", position=[0.0, 0.0, 0.0])
a.receiver.showObject = True
a.receiver.showObjectScale = 1.0
a.receiver.drawMode = 1
a.receiver.showColor = [0,1,0,1]
rosNode = sofaros.init("SofaNode")
rootNode.addObject(sofaros.RosReceiver(rosNode, "/animation/receiver/position",
a.receiver.findData("position"), Float32MultiArray, recv))
rootNode.addObject(sofaros.RosSender(rosNode, "/simulation/sender/position",
s.sender.findData("position"), Float32MultiArray, send))
return rootNode
改写到ROS1后:
# coding: utf8
import sofaros
from std_msgs.msg import Float32MultiArray
def send(data):
msg = Float32MultiArray()
msg.data = list(data.value[0])
return msg
def recv(data, datafield):
t = list(data)
datafield.value = [[t[0] + 1.0, t[1], t[2]]]
def createScene(rootNode):
rootNode.addObject('RequiredPlugin',
pluginName=["Sofa.Component.ODESolver.Backward", "Sofa.Component.SceneUtility"])
rootNode.addObject("EulerImplicitSolver")
rootNode.addObject("CGLinearSolver", iterations=25, threshold=1e-5, tolerance=1e-5)
rootNode.addObject('DefaultAnimationLoop')
rootNode.addObject('DefaultVisualManagerLoop')
s = rootNode.addChild("simulated")
s.addObject("MechanicalObject", name="sender", position=[0.0, 0.0, 0.0])
s.sender.showObject = True
s.sender.showObjectScale = 1.0
s.sender.drawMode = 1
a = rootNode.addChild("animated")
a.addObject("MechanicalObject", name="receiver", position=[0.0, 0.0, 0.0])
a.receiver.showObject = True
a.receiver.showObjectScale = 1.0
a.receiver.drawMode = 1
a.receiver.showColor = [0, 1, 0, 1]
# 下面的内容涉及到ROS的使用了
sofaros.init("ReceiverNode")
rootNode.addObject(sofaros.RosReceiver("/animation/receiver/position",
a.receiver.findData("position"), Float32MultiArray, recv))
rootNode.addObject(sofaros.RosSender("/simulation/sender/position",
s.sender.findData("position"), Float32MultiArray, send))
return rootNode
b. sofaros.py
使用ROS2.0的原文件:
# coding: utf8
import Sofa.Core
import rclpy
class RosSender(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
# to reduce the latency in TCP, we can disable Nagle's algo with tcp_nodelay=False in ROS1
# (https://en.wikipedia.org/wiki/Nagle%27s_algorithm)
# Todo: find the equivalent in ROS2
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosSender"
# Args
self.node = args[0]
rosname = args[1]
self.datafield = args[2]
msgtype = args[3]
self.sendingcb = args[4]
# Create or connect to the topic rosname as a publisher
self.pub = self.node.create_publisher(msgtype, rosname, 10)
def onAnimateEndEvent(self, event):
data = self.sendingcb(self.datafield)
self.pub.publish(data)
class RosReceiver(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosReceiver"
self.node = args[0]
rosname = args[1]
self.datafield = args[2]
msgtype = args[3]
self.recvcb = args[4]
# Create or connect to the topic rosname as a subscription
self.sub = self.node.create_subscription(msgtype, rosname, self.callback, 10)
self.data = None
def callback(self, data):
self.data = data.data
def onAnimateBeginEvent(self, event):
rclpy.spin_once(self.node, timeout_sec=0.001) # Something must be hidden in this spin_once(), without it the callback() is never called
if self.data is not None:
self.recvcb(self.data, self.datafield)
self.data = None
def init(nodeName="Sofa"):
rclpy.init()
node = rclpy.create_node(nodeName)
node.get_logger().info('Created node')
return node
改写到ROS1后:
# coding: utf8
import Sofa.Core
import rospy
from std_msgs.msg import Float32MultiArray
class RosReceiver(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosReceiver"
rosname = args[0]
self.datafield = args[1]
msgtype = args[2]
self.recvcb = args[3]
# Create or connect to the topic rosname as a subscription
self.sub = rospy.Subscriber(rosname, msgtype, self.callback, queue_size=10)
self.data = None
def callback(self, data):
self.data = data.data
def onAnimateBeginEvent(self, event):
if self.data is not None:
self.recvcb(self.data, self.datafield)
self.data = None
class RosSender(Sofa.Core.Controller):
def __init__(self, *args, **kwargs):
# Todo: find the equivalent in ROS2
Sofa.Core.Controller.__init__(self, *args, **kwargs)
self.name = "RosSender"
# Args
rosname = args[0]
self.datafield = args[1]
msgtype = args[2]
self.sendingcb = args[3]
# Create or connect to the topic rosname as a publisher
self.pub = rospy.Publisher(rosname, msgtype, queue_size=10)
def onAnimateEndEvent(self, event):
data = self.sendingcb(self.datafield)
self.pub.publish(data)
def init(nodeName="Sofa"):
rospy.init_node(nodeName)
rospy.loginfo('Created Receiver node')
1.3 运行结果
写好之后的运行流程:
首先打开三个终端,都执行以下命令:
$ cd ~/catkin_ws
$ source devel/setup.bash
然后在第一个终端执行:
$ roscore
在第二个终端执行:
$ cd ~/catkin_ws/src/sofaros_test/scripts
$ rosrun sofaros_test recv.py
在第三个终端执行:
$ cd ~/catkin_ws/src/sofaros_test/scripts
$ runSofa test_sofaros.py
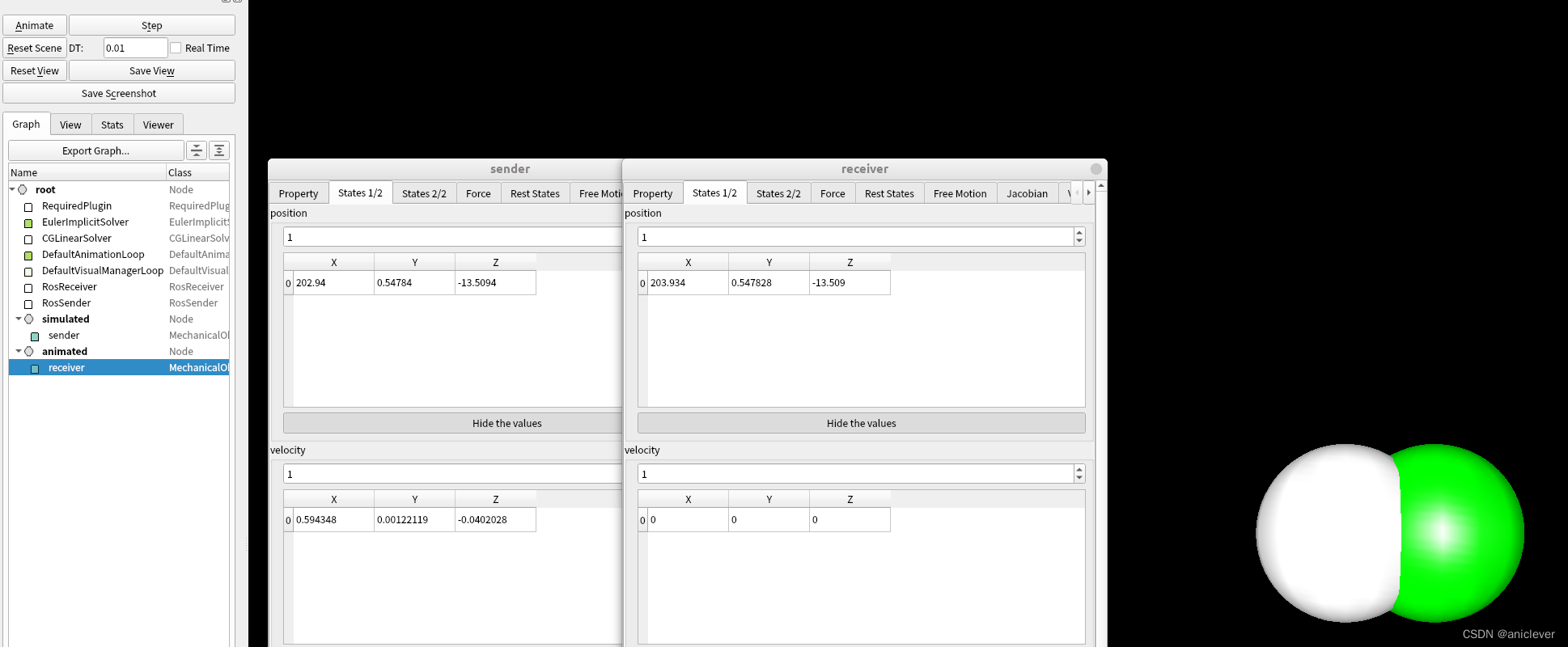
sofa的图形界面出现后,点击 Animate,就可以看到后台已经在运行了 。在sofa中,按住shift, 拖动小球,会发现两个小球一起运动了。双击树形结构里的 animation/receiver 和 simulation/sender, 然后都点第一个 states1/2 标签,可以看到二者的position在同步变化。如图所示:
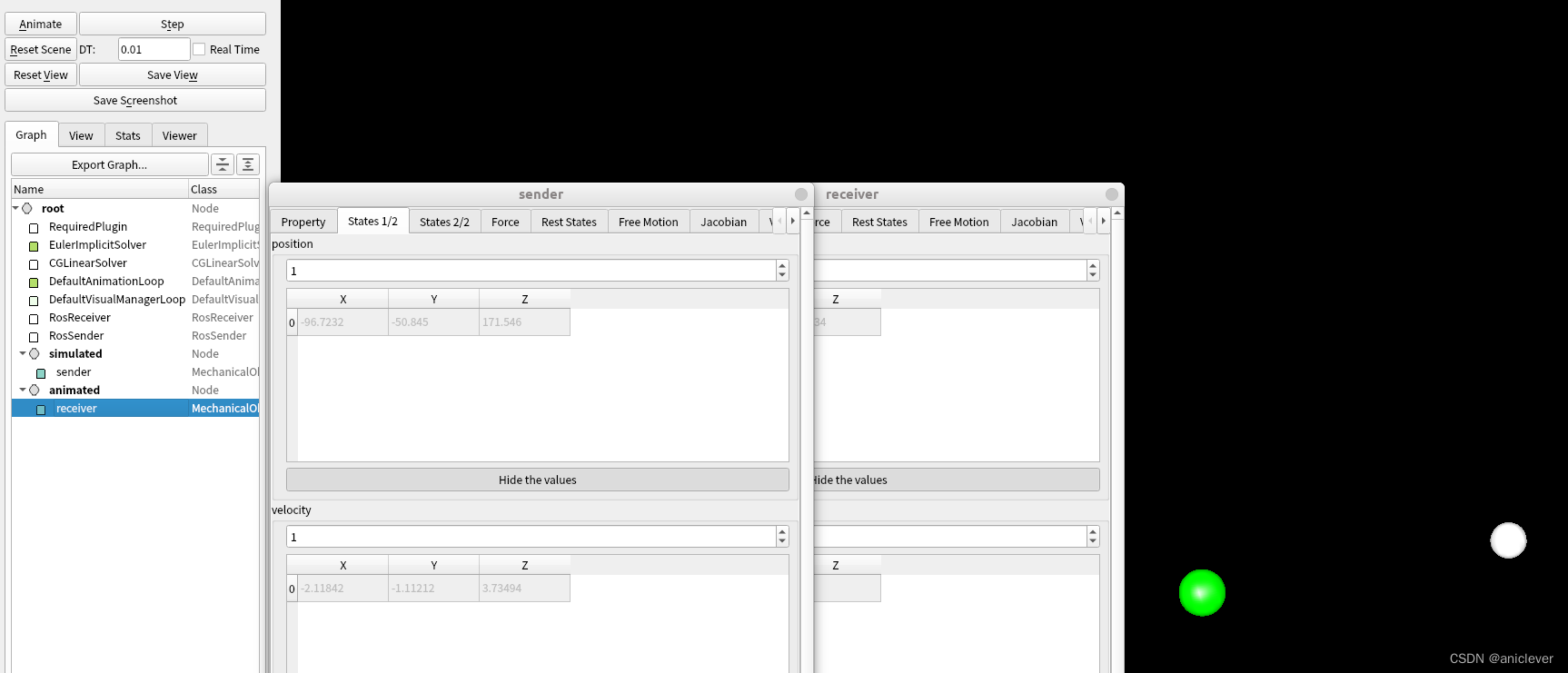
此时,如果把后台运行的 recv.py 关了(在终端里按 ctrl+c), 则小球不再同步运动(从反面说明了刚才在ROS里的通讯是成功的)

















 4225
4225

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









