







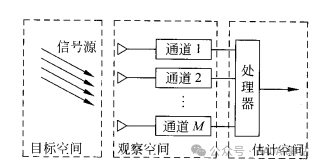
空间谱估计就是利用空间阵列实现空间信号的参数估计的一项专门技术。下图为空间谱估计的系统结构。目标空间代表我们所要感知的环境,在这个环境中包含着多个来自不同方向的目标入射信号。观察空间则可以表示成我们的雷达天线,由按照一定方式排列的阵元组中,图中通道代表着我们的接收天线。估计空间则表示我们的信号处理模块,从观察空间得到的信号数据在估计空间,即处理器中进行处理,并还原出真实的目标信号源数和入射角。
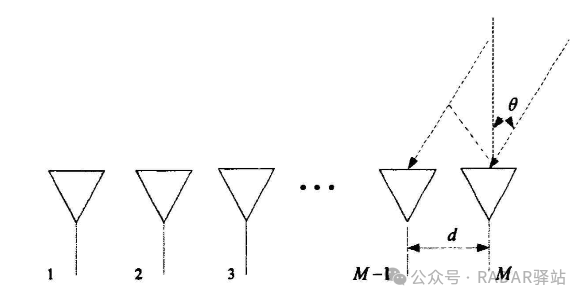
将观察空间再细化,得到下面的阵列测向基本模型,其中,M为阵列接收天线个数,θ为信号入射角。
接下来,我们考虑多个信号源入射到空间阵列的数学模型,这部分为空间谱估计理论的基础,也是后续DML , DBF,MUSIC,Capon等DOA估计方法的理论基础。
1.1通常情况下的数学模型
假设有N个原场窄带(Bw<<Freq)信号入射到具有M个阵元的某阵列上,通过观察空间采集到的数据,在估计空间上信号可用如下的复包络形式表示:

(4.1.1a)
式中,
![]()
是接收信号的幅度,
![]()
是接收信号的相位,
![]()
是接收信号的频率,在窄带远场信号源的假设下,有
(4.1.1b)
根据式(4.1.1a)和式(4.1.1b),可以得到下式:
![]()
(4.1.2)
因此,第l个阵元的接收信号表示为

(4.1.3)
上式中,
![]()
为第l个阵元对第i个信号的增益,
![]()
表示第l个阵元在t时刻的噪声,
![]()
表示第i个信号到达第l个阵元时相对于参考阵元的时延。
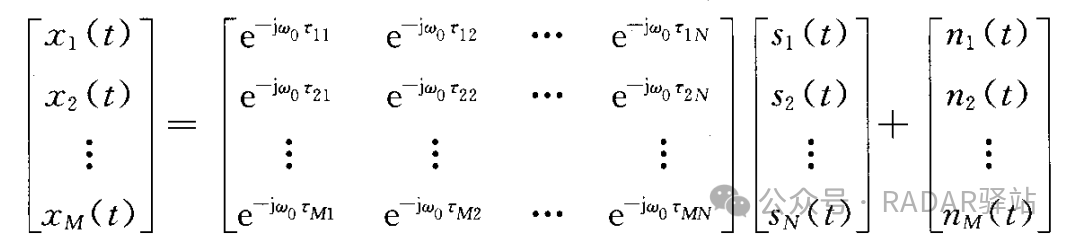
将M个阵元在特定时刻接收到的信号排列成一个列矢量,可得

(4.1.4)
假设每个接收阵元间互不干扰,则
![]()
可以归一化为1,因此上式可以简化为
(4.1.5)
将式(4.1.5)写成矢量形式如下:
![]()
(4.1.6)
式中,X(t)为阵列的M x 1维快拍数据矢量,N(t)为阵列的M x 1维噪声数据矢量,S(t)为空间信号的N x 1维矢量,A为空间阵列的M x N维阵列流型矩阵(导向矢量阵),且

(4.1.7a)
其中,导向矢量
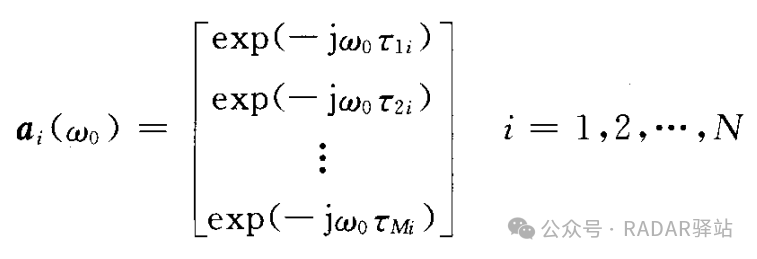
(4.1.7b)
式中,
![]()
, c为光速,
![]()
为波长。
根据上述公式,要获得导向矢量则需要知道τ(相位时延)的值,根据空间几何关系,可以知道阵元间的相位时延表示如下

(4.1.8)
几何模型如下图,
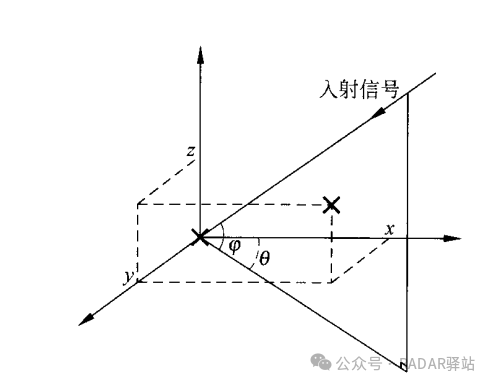
因此,关键在于求得不同阵列中各阵元间相位时延的值。
根据我们平常所用到的阵列类型,这里介绍两种阵列的阵元间相位延迟计算方式。
(1)平面阵
设阵元的位置为
![]()
,以原点为参考点,另假设信号入射参数为
![]()
,分别表示方位角与俯仰角,其中方位角表示与x轴的夹角,则有

(4.1.9a)
(2)线阵
设阵元的位置为
![]()
,以原点为参考点,另假设信号入射参数为
![]()
,表示方位角,其中方位角表示与y轴的夹角(即与线阵法线的夹角),则有
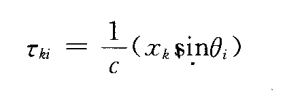
(4.1.9b)
1.2DML(确定性最大似然估计)
首先,我们回顾概率论中对于最大似然估计的计算步骤,如下,
(1)列出n次样本下联合分布函数,即似然函数

(4.2.1)
(2)对似然函数求对数lnL(θ);
(3)对得到的对数似然函数求一阶偏导,解对数似然方程,得到最大似然估计值θ
(4.2.2)
在空间谱估计中,根据入射信号的模型,最大似然算法基本上分为两类:确定性最大似然(DML)和随机性最大似然(SML)。当入射信号服从高斯随机分布模型时导出的最大似然算法是SML算法,反之当信号模型是未知的确定模型时导出的最大似然算法为DML算法。在此我们只讨论DML算法,可以突破瑞利限,即物理孔径分辨率。
根据前面的空间谱估计基础理论,我们知道,窄带远场信号的DOA数学模型为
![]()
其中,阵列流型矩阵A包含θ角度,因此也可以写成

(4.2.3)
对于以上的数学模型有如下几点假设。
(1)阵列的阵元数大于信号源数,快拍数大于阵元数;
(2)不同的快拍数之间的噪声协方差矩阵为0,也就是不相关,且各阵元接收的噪声是正态分布的,噪声功率为
![]()
;
(3)信号协方差矩阵
![]()
是正定的(非奇异,即满秩矩阵)。
上述的假设意味着数学模型中的加性噪声为空间白噪声,假设1保证保证阵列流型矩阵中各导向矢量的线性独立性,快拍数的要求则是保证统计性能的有效性,因为最终得到的信号协方差矩阵为一个估计值
![]()
。
根据上述假设,对于DML,由于模型未知,所以观察数据的一阶矩(均值)和二阶矩(方差)满足如下条件:
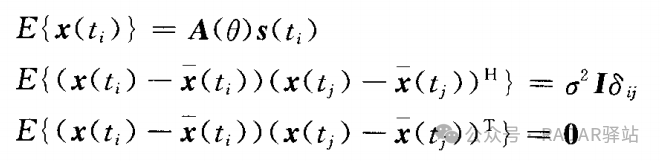
(4.2.4)
观察矢量L次快拍的联合(条件)概率密度函数为

(4.2.5)
对上式似然函数两边同时取负对数,可得

(4.2.6)
为了得到参数的最大似然估计,应该求对数似然函数在参数空间上的最大值。
对于DML,式(4.2.6)中的f是一个关于未知参数θ,和S的函数,
![]()
为协方差矩阵的估计,即快拍数据的协方差矩阵。所以最大似然估计也就是求得一组参变量使准则式(4.2.5)最小。由式(4.2.6)可得未知参量
![]()
和S的确定性最大似然估计
(4.2.7)
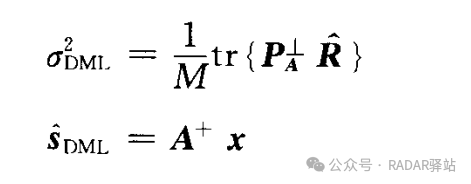
将式(4.2.7)代入式(4.2.6)可得确定性最大似然的准则,即化简为变量θ的估计

(4.2.8a)
或者,也可以写成
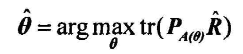
(4.2.8b)
上式中,正交投影矩阵
![]()
,阵列时域采样空间相关矩阵的估计值
![]()
, tr()为矩阵的求迹运算(矩阵对角元素和)。
根据上述推论,MATLAB仿真代码部分截图如下:
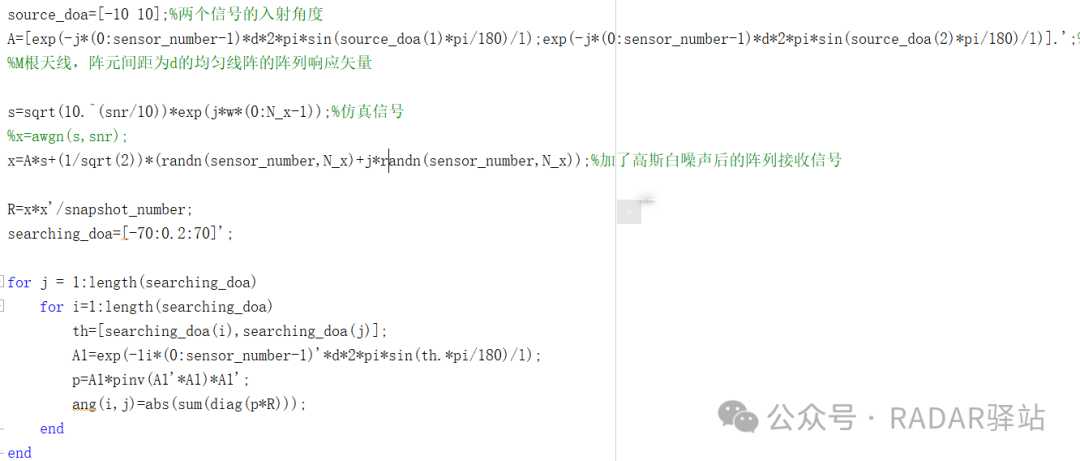
仿真结果如下
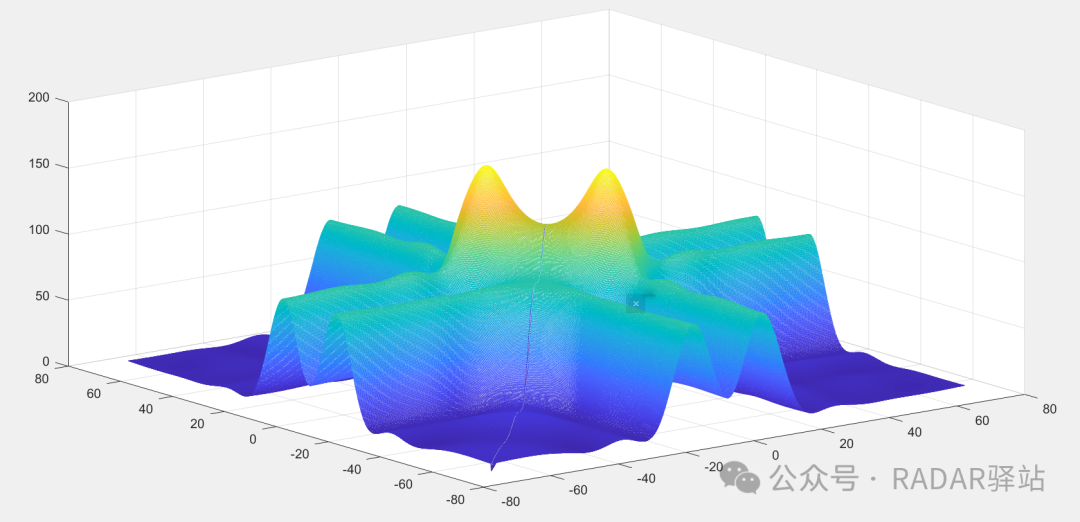
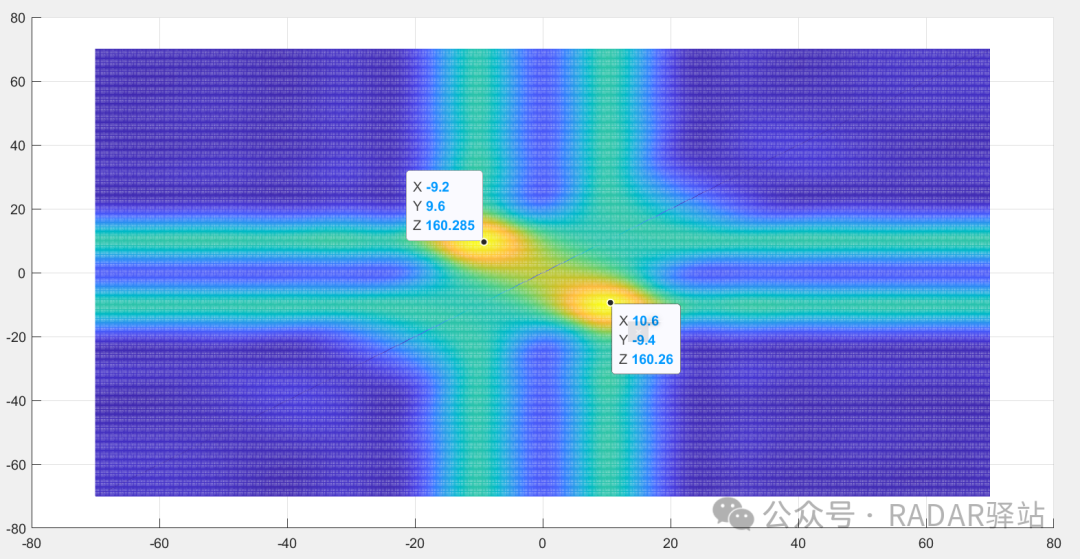
更多内容,可关注微信公众号:RADAR驿站



















 7683
7683

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









