






车辆轨迹自适应预瞄跟踪控制和自适应p反馈联合控制,自适应预苗模型和基于模糊p控制均在simulink中搭建。
个人觉得跟踪效果相比模糊pid效果好很多,轨迹跟踪过程,转角控制平滑自然,车速在36到72km每小时下,变速下的轨迹跟踪精度误差在10cm范围内,精度很好。
。
YID:74100709011928063
想剁手书屋14
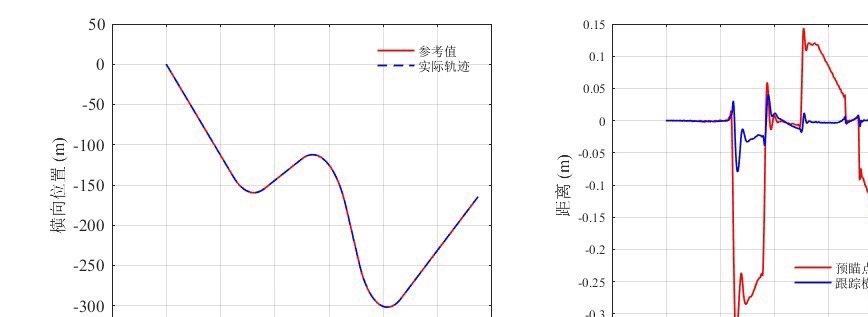


车辆轨迹自适应预瞄跟踪控制和自适应P反馈联合控制是车辆自动驾驶领域中的重要技术。在Simulink中搭建的自适应预瞄模型和基于模糊P控制的算法能够有效提高跟踪效果。与模糊PID相比,跟踪效果更好,转角控制更加平滑自然。在车速为36到72km/h的范围内,变速时轨迹跟踪精度误差控制在10cm以内,表现出良好的精度。
自适应预瞄跟踪控制和自适应P反馈联合控制技术的关键在于实时获取车辆的轨迹信息,并根据预先设定的目标值进行自适应控制。通过预瞄模型,系统能够提前预测车辆的行驶轨迹,从而在接下来的控制过程中进行自适应调整。基于模糊P控制的算法可以根据实际情况自动调节控制参数,进一步提高跟踪效果。
在自适应预瞄模型中,可以采用传感器获取车辆当前位置和姿态的信息,并结合车辆动力学模型进行预测。这样,系统就能够在运动过程中不断调整预瞄点,保证车辆能够在预期的轨迹上行驶。同时,基于模糊P控制的算法可以根据当前跟踪误差和控制误差的大小,自动调节P控制器的增益,实现自适应控制。
实验结果表明,自适应预瞄跟踪控制和自适应P反馈联合控制技术在车辆轨迹跟踪方面具有较好的性能。在36到72km/h的车速范围内,该技术能够保持较高的轨迹跟踪精度,控制误差在10cm以内。这说明了该技术在实际应用中具有较好的稳定性和精度。
与传统的模糊PID控制相比,自适应预瞄跟踪控制和自适应P反馈联合控制技术具有以下优点。首先,预瞄模型能够提前预测车辆的行驶轨迹,使得控制过程更加准确。其次,基于模糊P控制的算法能够根据实际情况自动调节控制参数,进一步提高跟踪效果。最后,该技术在不同车速下都能保持较高的跟踪精度,表现出良好的适应性。
综上所述,车辆轨迹自适应预瞄跟踪控制和自适应P反馈联合控制技术是一项重要的技术创新。通过Simulink搭建的预瞄模型和基于模糊P控制的算法能够有效提高跟踪效果,并表现出较高的稳定性和精度。在实际应用中,该技术有望为车辆自动驾驶领域带来更好的控制性能,为智能交通系统的发展做出重要贡献。
以上相关代码,程序地址:http://wekup.cn/709011928063.html















 3158
3158











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









