






无人驾驶轨迹自适应预瞄控制和自适应p反馈联合控制,自适应预苗模型和基于模糊p控制均在simulink中搭建。
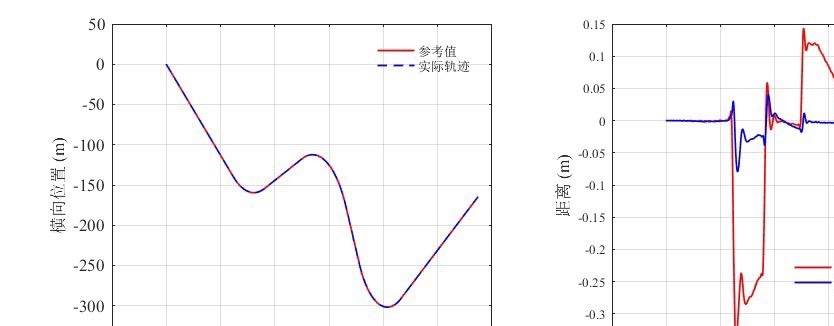
个人觉得跟踪效果相比模糊pid效果好很多,轨迹跟踪过程,转角控制平滑自然,车速在36到72km每小时下,变速下的轨迹跟踪精度误差在10cm范围内,精度很好。
另外可赠送基于模糊pid控制的路径跟踪,以及搭建预苗模型对应的资料部分
烈推荐仔细看看。
ID:72120685199685919
想剁手书屋14

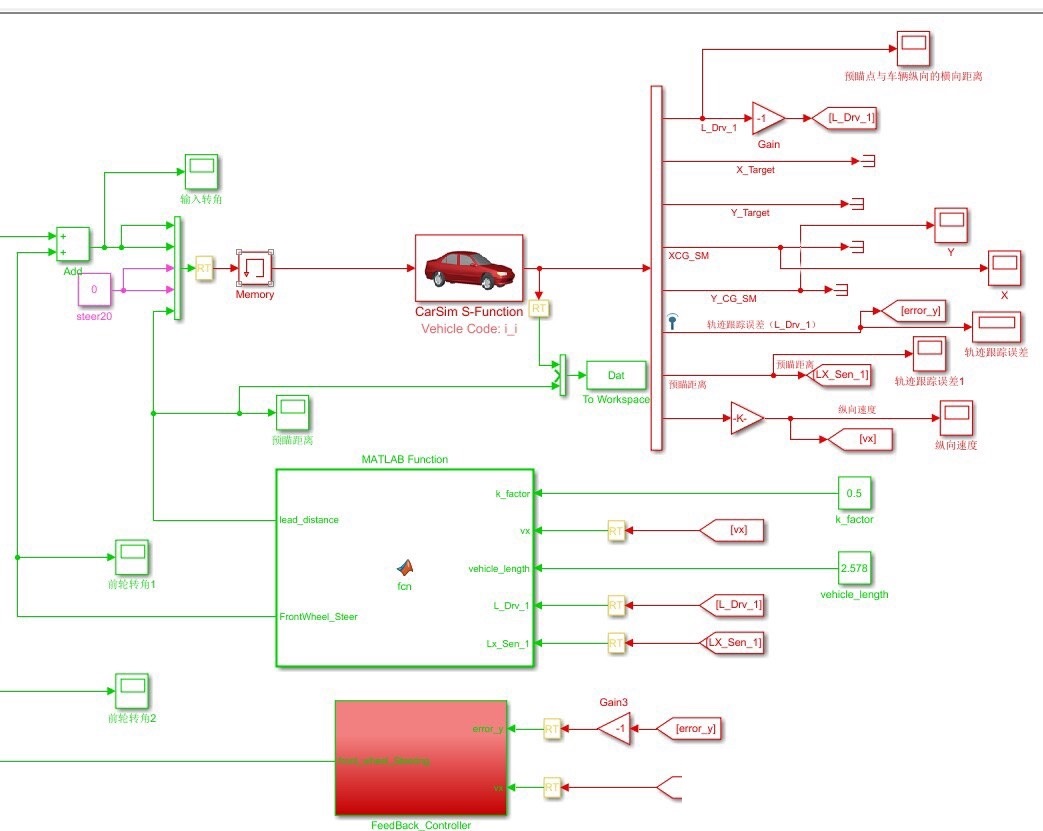
无人驾驶技术已经成为当前科技领域的热点话题之一。而在无人驾驶领域中,轨迹跟踪控制是一项至关重要的技术。本文将围绕“无人驾驶轨迹自适应预瞄控制和自适应P反馈联合控制”展开详细的分析和讨论。我们将重点介绍Simulink平台下的搭建过程,并探讨自适应预苗模型和基于模糊P控制的优势。
在无人驾驶领域中,轨迹跟踪是指车辆根据预先设定的轨迹,自主地控制行驶方向和速度,以实现精确的路径跟踪。而在轨迹跟踪控制中,控制算法的选择至关重要。本文提出的无人驾驶轨迹自适应预瞄控制和自适应P反馈联合控制方法,通过结合预瞄控制和自适应P反馈控制的优势,实现了更好的跟踪效果。
首先,我们使用Simulink平台搭建了无人驾驶轨迹自适应预瞄控制和自适应P反馈联合控制系统。Simulink是一种基于模型的设计和仿真环境,它可以帮助开发人员在仿真环境中快速构建和测试控制系统。通过Simulink,我们可以直观地展示无人驾驶车辆的轨迹跟踪过程,并对控制算法进行优化和验证。
在我们的实验中,我们发现自适应预苗模型相较于模糊PID控制,具有更好的轨迹跟踪效果。在车速在36到72km每小时范围内变速的情况下,自适应预苗模型的轨迹跟踪精度误差仅在10cm范围内,表现出了优秀的精度。此外,自适应预苗模型的转角控制也更加平滑自然,为乘车人提供了更好的行驶体验。
除了自适应预苗模型,我们还可以赠送搭建了基于模糊PID控制的路径跟踪资料部分。模糊PID控制是一种基于模糊逻辑推理的控制方法,它能够根据车辆当前状态和控制需求,动态调整控制参数,以实现更好的路径跟踪效果。我们在资料部分详细介绍了基于模糊PID控制的原理和实现方法,有助于读者更好地理解和运用该控制算法。
综上所述,我们强烈推荐大家仔细阅读本文。本文详细介绍了无人驾驶轨迹自适应预瞄控制和自适应P反馈联合控制的方法,并在Simulink平台中进行了实验验证。通过本文的研究,读者可以了解到自适应预苗模型相对于模糊PID控制的优势,以及如何搭建和优化这些控制算法。我们希望本文能够为无人驾驶技术的发展提供有益的借鉴和参考。
【相关代码 程序地址】: http://nodep.cn/685199685919.html















 460
460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









