







 本文介绍了快速压缩跟踪(Fast Compressive Tracking, FCT)算法,对比了生成跟踪和判别跟踪算法的优缺点。FCT通过获取目标区域特征、使用稀疏测量矩阵进行降维处理以及应用贝叶斯分类器实现高效跟踪。文章详细阐述了特征提取、降维方法和分类过程,旨在提高跟踪算法的鲁棒性。"
111014801,10296899,树莓派Python OpenCV图像与视频操作教程,"['树莓派开发', 'Python编程', '计算机视觉', 'OpenCV教程']
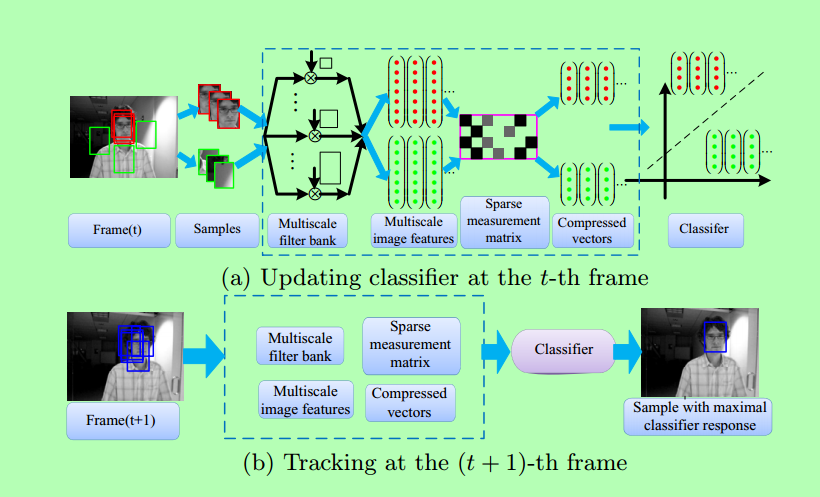
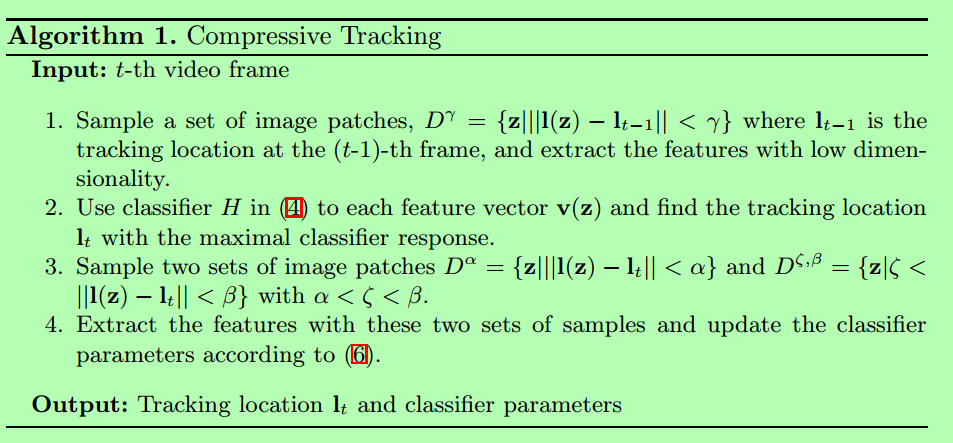
本文介绍了快速压缩跟踪(Fast Compressive Tracking, FCT)算法,对比了生成跟踪和判别跟踪算法的优缺点。FCT通过获取目标区域特征、使用稀疏测量矩阵进行降维处理以及应用贝叶斯分类器实现高效跟踪。文章详细阐述了特征提取、降维方法和分类过程,旨在提高跟踪算法的鲁棒性。"
111014801,10296899,树莓派Python OpenCV图像与视频操作教程,"['树莓派开发', 'Python编程', '计算机视觉', 'OpenCV教程']
本文为原创,转载请注明出处:http://blog.csdn.net/autocyz/article/details/44490009
Fast Compressive Tracking
(快速压缩跟踪)
虽然目前有很多种的跟踪算法,但是由于姿态的变化、光照的变化、障碍物等原因的存在,导致很多算法的鲁棒性不好。
目前比较主流的跟踪算法有两种,generative tracking algorithms(生成跟踪算法)和discriminative algorithms(判别跟踪算法)。
生成跟踪算法,顾名思义边生成边跟踪。即对这一帧的样本进行学习,将学习的结果作为下一帧的分类器,达到边学习跟踪,边跟踪边学习的效果。这种跟踪算法的缺点是在视频的前几帧,样本量较少,因此大部分的算法要求视频中目标在视频的前面变化不大。如果目标变化较大,会产生漂移现象。
判别算法认为跟踪就是一个二分类器的问题,其目的是要找到一个将目标从背景中区分出的边界。但是这种算法只用了一个正样本和少量的负样本来跟新分类器。当特征模板含有噪声或者位置偏离时,便会出现漂移现象。
作者的算法:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









