







模糊控制的过程:输入->输入模糊化->模糊运算->运算结果解模糊化->输出
理论基础
模糊化
隶属函数
隶属度函数:若对论域(研究的范围)U中的任一元素x,都有一个数A(x)∈[0,1]与之对应,则称A为U上的模糊集,A(x )称为x对A的隶属度。当x在U中变动时,A( x)就是一个函数,称为A的隶属函数。
用人话来说,隶属度函数就是相关程度,不相关为0,相关为1,部分相关为0.x
例如:下图所示的隶属函数(NB NS ZO PS PB)图形中,对于-0.4是属于NB还是NS是无法给出确定的答案的,只能说-0.4属于NB和属于NS的可能性都为0.37

隶属函数的分类
内容来源于 Matlab-帮助

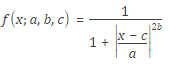
1、广义钟形隶属函数

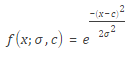
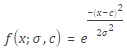
2、高斯隶属函数

3、高斯组合隶属函数

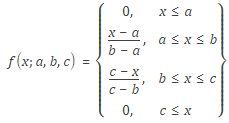
4、三角隶属函数

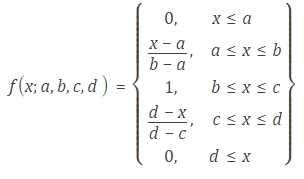
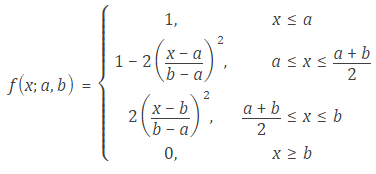
5、梯形隶属函数

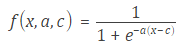
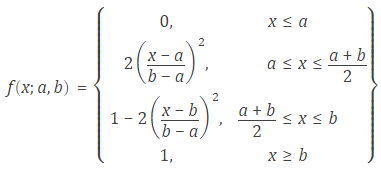
6、S形隶属函数

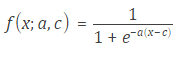
7、双S形隶属函数

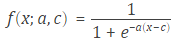
8、双S乘积形隶属函数

9、Z形隶属函数

10、Ⅱ形隶属函数


11、S状隶属函数

解模糊
重心法

fnum = 0;
fden = 0;
for i = 1:1:3
for j = 1:1:3
fnum = fnum + u1(i)*u2(j)*U(i,j); % U 为模糊规则表(3*3)
fden = fden + u1(i)*u2(j);
end
end
u(k) = fnum/(fden + 0.01);
最大隶属度法
选择隶属度最大的元素作为输出

系数加权平均法
在最大隶属度法的基础之上的改进,权重 ki 为可调参数。

离散化系统仿真
以被控对象 G(s) = 133/s² + 25s ,目标信号为阶跃信号为例
建立模糊系统
% fuzzy inference system
% 输入误差 e 以及 de ,经过模糊系统计算出 △kp,△ki,结合 pid 进行控制
clear all;
close all;
a = newfis('fuzzy_pid'); % 输入 e
a = addvar(a,'input','e',[-1,1]);
a = addmf(a,'input',1,'N','zmf',[-1,-1/3]);
a = addmf(a,'input',1,'Z','trimf',[-2/3,0,2/3]);
a = addmf(a,'input',1,'P','smf',[1/3,1]);
a = addvar(a,'input','de',[-1,1]); % 输入 de
a = addmf(a,'input',2,'P','smf',[1/3,1]);
a = addvar(a,'output','kp',[-10,10]); % 输出 kp
a = addmf(a,'output',1,'N','zmf',[-10,-3]);
a = addmf(a,'output',1,'Z','trimf',[-5,0,5]);
a = addmf(a,'output',1,'P','smf',[3,10]);
a = addvar(a,'output','ki',[-3,3]); % 输出 ki
a = addmf(a,'output',2,'N','zmf',[-3,-1]);
a = addmf(a,'output',2,'Z','trimf',[-2,0,2]);
a = addmf(a,'output',2,'P','smf',[1,3]);
rulelist = [1 1 1 2 1 1
1 2 1 2 1 1
1 3 1 2 1 1
2 1 1 3 1 1
2 2 3 3 1 1
2 3 3 3 1 1
3 1 3 2 1 1
3 2 3 2 1 1
3 3 3 2 1 1];
a = addrule(a,rulelist);
a = setfis(a,'DefuzzMethod','centroid');
writefis(a,'fuzzy_pid');
fis = addvar(fis,varType,varName,varBounds)
fis = addvar(fis,输入/输出,变量名,变量范围)
a = addmf(fis,varType,varIndex,mfName,mfType,mfParams)
a = addmf(fis,输入/输出,成员函数变量索引,成员变量名,成员类型,成员变量的范围)
rulelist = [a,b,c,d]; % 以单输入单输出为例,rulelist矩阵列数为:输入个数+输出个数+2
rulelist = [输入成员变量索引,输出成员变量索引,权重,各条件的关系];
主程序
clear all;
close all;
a = readfis('fuzzy_pid');
ts = 0.001;
sys = tf(133,[1 25 0]);
dsys = c2d(sys,ts,'z');
[num,den] = tfdata(dsys,'v');
kp0 = 0; ki0 = 0; % kp 和 ki 的初始值为0
u_2 = 0; u_1 = 0;
y_2 = 0; y_1 = 0;
e_1 = 0; ec_1 = 0; ei = 0;
for k = 1:1:2000
time(k) = k*ts;
yd(k) = 1;
% using fuzzy inference system to tunning PI
k_pid = evalfis([e_1,ec_1],a); % 执行模糊推理计算
kp(k) = kp0 + k_pid(1);
ki(k) = ki0 + k_pid(2);
u(k) = kp(k)*e_1 + ki(k)*ei;
y(k) = -den(3)*y_2 - den(2)*y_1 + num(3)*u_2 + num(2)*u_1;
e(k) = yd(k) - y(k);
u_2 = u_1; u_1 = u(k);
y_2 = y_1; y_1 = y(k);
ei = ei + e(k)*ts;
ec(k) = e(k) - e_1;
e_1 = e(k);
ec_1 = ec(k);
end
figure(1)
plot(time,yd,'r',time,y,'b');grid
figure(2)
plot(time,e,'r',time,ec,'b');grid
仿真结果
信号跟踪:

红色为目标信号,蓝色为实际输出信号
误差:

红色为误差信号,蓝色为误差信号的变化率















 2874
2874











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









