









 文章详细介绍了自适应ICP算法在三维模型配准中的应用,包括算法的实现步骤、数学公式以及核心程序。通过自适应地选择最近邻点,该算法提高了配准的效率和鲁棒性,适用于三维重建、机器人视觉等领域。
文章详细介绍了自适应ICP算法在三维模型配准中的应用,包括算法的实现步骤、数学公式以及核心程序。通过自适应地选择最近邻点,该算法提高了配准的效率和鲁棒性,适用于三维重建、机器人视觉等领域。
目录
1.算法理论概述
三维模型配准是三维重建、三维建模、机器人视觉等领域中重要的基础问题。在三维模型配准中,自适应ICP算法是一种常用的配准算法,可以快速而准确地将多个三维模型进行配准和融合。本文将从专业角度详细介绍基于自适应ICP算法的三维模型配准算法,包括算法的实现步骤、数学公式及其推导过程等。
1.1、自适应ICP算法
自适应ICP算法是一种改进的迭代最近点算法(Iterative Closest Point,ICP),它通过自适应地选择最近邻点来提高配准的效率和鲁棒性。下面将介绍自适应ICP算法的实现步骤和相关数学公式。
1.实现步骤
自适应ICP算法的实现步骤如下:
(1)初始化:输入两个待配准的三维模型,分别是模型A和模型B,其中模型A是基准模型,模型B是需要与模型A对齐的模型。初始化变换矩阵T为单位矩阵。
(2)选择最近邻点:对于模型B中的每个点p,从模型A中选择最近的n个点作为参考点集,其中n是一个自适应的参数,可以根据实际情况进行调整。通过KD树等数据结构可以快速找到最近邻点。
(3)计算变换矩阵:使用ICP算法计算模型B中的点p与参考点集在模型A中对应的点的最优变换矩阵T',可以使用SVD等方法求解。
(4)更新变换矩阵:将变换矩阵T'与当前的变换矩阵T相乘,得到新的变换矩阵T。
(5)重复执行步骤2-4,直到满足收敛条件,例如变换矩阵的变化小于一个阈值或迭代次数达到预设值。
(6)输出结果:输出配准后的模型B的点云数据及其变换矩阵。
1.2.icp数学公式
(1)距离度量
在自适应ICP算法中,距离度量是一个关键的概念。常用的距离度量方法包括欧氏距离、马氏距离等。以欧氏距离为例,其数学公式如下:
$$
d(p, q)=\sqrt{\sum_{i=1}^{3}(p_i-q_i)^2}
$$
其中$p=(p_1,p_2,p_3)$和$q=(q_1,q_2,q_3)$分别是两个三维点的坐标。
(2)ICP优化目标
ICP算法的优化目标是最小化两个模型之间的距离。假设模型A中的点云数据为$P_A={p_i}$,模型B中的点云数据为$P_B={q_i}$,则ICP的优化目标可以表示为:
$$
E(T)=\sum_{i=1}^{n}\left|p_i-Tq_i\right|^2
$$
其中$T$是变换矩阵。
(3)ICP变换矩阵的计算
ICP算法中的变换矩阵可以通过最小二乘法来求解。假设$P_A$中的点$p_i$和$P_B$中的点$q_i$是一一对应的,即$p_i$和$q_i$是相似的物体表面上的点,那么可以通过最小化二乘误差来计算变换矩阵$T$。具体地,将目标函数$E(T)$对$T$求导,令导数为0,得到:
$$
\begin{aligned}
\frac{\partial E(T)}{\partial T} & =\sum_{i=1}^{n}\frac{\partial}{\partial T}\left|p_i-Tq_i\right|^2 \
& =-2\sum_{i=1}^{n}(p_i-Tq_i)q_i^T
\end{aligned}
$$
将导数为0代入上式,得到:
$$
T=(\sum_{i=1}^{n}p_iq_i^T)(\sum_{i=1}^{n}q_iq_i^T)^{-1}
$$
其中$(\sum_{i=1}^{n}q_iq_i^T)^{-1}$是$q_iq_i^T$的逆矩阵。
(4)自适应参数n的计算
自适应ICP算法中的参数n表示选择的参考点数目,可以通过以下公式进行计算:
$$
n=k\cdot \left\lceil\frac{N_A}{N_B}\right\rceil
$$
其中$k$是一个调节因子,$N_A$和$N_B$分别是模型A和模型B中的点数。
基于自适应ICP算法的三维模型配准算法,包括算法的实现步骤和相关数学公式。自适应ICP算法通过自适应地选择最近邻点来提高配准的效率和鲁棒性,可以快速而准确地将多个三维模型进行配准和融合,是三维重建、三维建模、机器人视觉等领域中重要的基础问题之一。
2.部分核心程序
function [error,Reallignedsource,transform,Derr]=rigidICP(target,source)
% 定义函数 rigidICP,输入参数为 target 和 source 两个点云数据,输出参数为 error、Reallignedsource、transform 和 Derr。
% target 和 source 都是 N3 大小的 3D 点云数据,其中 N 表示点云中点的个数,3 表示点云中每个点的坐标数。
% 函数的作用是将 source 点云旋转、平移和缩放,使其与 target 点云形状相似。
% 调用函数 Preall,对 target 和 source 进行预对齐操作
[Prealligned_source,Prealligned_target,transformtarget ]=Preall(target,source);
% 显示 'error'
display ('error')
errortemp(1,:)=0;% 初始化 errortemp 和 index
index=2;
% 调用函数 ICPmanu_allign2,进行迭代对齐操作,计算出 errortemp 和 Reallignedsourcetemp
[errortemp(index,:),Reallignedsourcetemp]=ICPmanu_allign2(Prealligned_target,Prealligned_source);
% 初始化 Derr 和 indxx
Derr = [];
indxx=0;
% 进行循环,直到 errortemp 达到收敛或循环次数达到上限
while ((abs(errortemp(index-1,:)-errortemp(index,:)))>1e-15 & indxx<200)
indxx=indxx+1;
[errortemp(index+1,:),Reallignedsourcetemp]=ICPmanu_allign2(Prealligned_target,Reallignedsourcetemp);
index=index+1;
d=errortemp(index,:)
Derr = [Derr,d];
end
% 计算 error 和 Reallignedsource,并调用函数 procrustes,计算出变换信息 transform
error=errortemp(index,:);
Reallignedsource=Reallignedsourcetemp*transformtarget.T+repmat(transformtarget.c(1,1:3),length(Reallignedsourcetemp(:,1)),1);
[d,Reallignedsource,transform] = procrustes(Reallignedsource,source);
19_0012m3.算法运行软件版本
matlab2017b
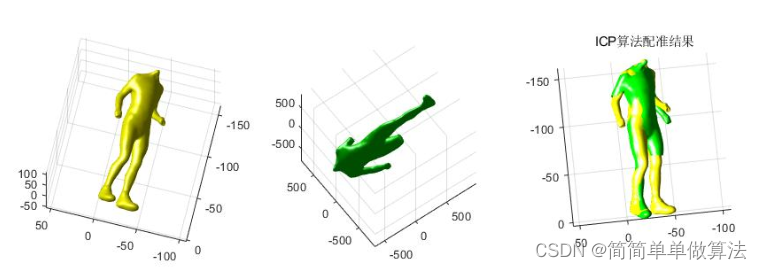
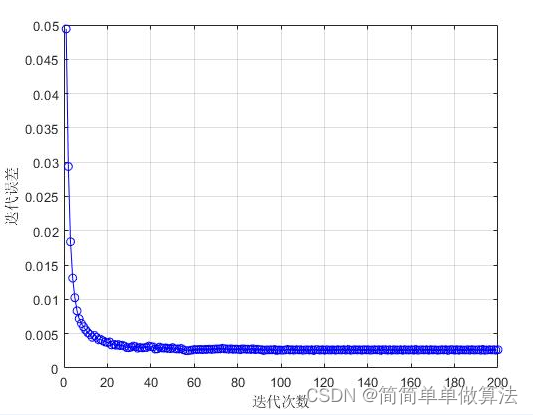
4.算法运行效果图预览
5.算法完整程序工程
OOOOO
OOO
O



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











