







基于圆展开自适应三边测量算法的室内定位
具有无线通信功能的移动设备的日益普及刺激了室内定位服务的增长。室内定位用于实时定位设备位置,方便访问。然而,由于大量障碍物,与室外定位相比,室内定位具有挑战性。全球定位系统非常适用于室外定位,但在空间有限的室内环境中却无法发挥作用。物联网 (IoT) 的最新发展带来了可用于室内定位的便携且经济高效的无线技术。在这项工作中,提出了一种基于接收信号强度指示符(RSSI)的自适应三边测量算法。评估所提出算法、低功耗蓝牙 (BLE)、Wi-Fi (IEEE 802.11n)、使用了 ZigBee 和 LoRaWAN IoT 技术。结果表明,与现有相关工作相比,BLE 的错误性能提高了 4%,ZigBee 提高了 17%,Wi-Fi 提高了 22%,LoRaWAN 提高了 33%。
介绍
由于位置感知计算的应用层出不穷,对精确导航定位系统的需求越来越强烈。由于信号的多径传播 [ 1 ],全球国家卫星系统 (GNSS) 等现有系统使用在射频频谱的千兆赫兹区域传输的信号,因此很难提供准确的位置估计。GNSS 与惯性导航系统 (INS) 的集成具有抗强干扰的潜力。然而,城市室内环境越来越复杂,金属表面的反射和衍射使得用户在室内通过GNSS-INS实现正常的高精度定位变得格外困难[ 2]. 机器学习和物联网 (IoT) 的最新发展通过赋予机器人在室内环境中自我操作的个人智能来改进机器人的平台 [ 3 ]。机器人的新应用在仓库、零售和制造行业中用于物品分拣、交付和管理。仓库和工业充满了可重复的、面向过程的和容易出错的操作。机器人技术和自动化可以接管人类的重复性任务(拣选、接收、上架),以实现更加一致、准确和高效的仓库运营[ 4、5] 。因此,对于机器人来说,了解它们的位置以执行位置效率更高的任务非常重要。自动化机器人可以通过避开障碍物并在两点之间的最短路径上行走,在仓库地面上自由导航。它们还可以在医院中用于执行高风险活动,例如在 COVID-19 等大流行病期间运送药物。同样,为了避障,使用了超声波传感器模块和预加载智能 [ 6 ]。射频识别 (RFID) 扫描仪用于通过检测给定路径上的其他位置来识别和验证机器人在路径上的目的地和重新校准位置 [ 7]. 目前可用的精密卫星和基于超声波的定位系统的精度仅限于室内环境中的视线 [ 4 ]。因此,对于复杂的室内环境,需要一种高精度的自适应算法。近年来,由于机器对机器接口和物联网的发展,这种愿望有所增加。通过物联网,开发了新的低成本小工具和可穿戴设备。其中包括蓝牙低功耗 (BLE) 信标,能够集成到仓库或超市的机器人或设备中,以便轻松定位。此外,Wi-Fi、ZigBee 和 LoRaWAN 无线技术也得到了发展,这些技术可用于以最少的硬件配置进行室内定位 [ 8]]. 因此,机器对机器接口和物联网的发展构成了当前和未来高精度定位系统的重要特征 [ 9 、10、11 ]。本文的贡献是双重的:首先,通过将三边测量算法与圆扩展阶段相结合来提高定位精度;其次,通过使用基于物联网的通信技术在室内环境中定位物体来提高效率。
本文的其余部分组织如下:“相关工作”部分讨论了相关文献。“材料和方法”部分详细介绍了所提出的自适应三边测量算法的开发。“结果和讨论”部分介绍和讨论与现有文献相关的结果,“结论”部分总结本文。
相关作品
由于不断变化的室内环境中的多径衰落,已开发出不同的算法来适应特定环境。室内环境的这些变化是不可避免的,并且会降低已开发的室内定位算法的整体精度 [ 12 ]。已经基于不同的无线技术开发了几种室内定位系统。使用 ZigBee 技术的无线传感器网络 (WSN) 得到了很好的研究,并用于使用低功耗、低内存和低计算设备的室内定位系统[ 13、14、15、16、2]. 然而,能够实现自主操作机器人和工业自动化的自适应室内定位算法的工作有限 [ 17 ]。
[ 18 ]中提出了一种用于 WSN 的新型 3D 自适应算法。该算法的工作原理是首先将所有非锚节点连接到锚节点,然后形成初始的更小的组。最后,当环境发生变化时,节点测量并纠正非锚节点(组中丢失/断开的非锚节点)和锚节点之间的定位误差。这是通过维护节点之间的邻居表成功完成的。
WSN 信道传播的衰落特性在 [ 19 ] 中进行了测试。作者提出了室内自适应定位算法的三阶对数正态路径损耗模型。该算法使用在不同环境条件下固定节点中接收到的接收信号强度指示符 (RSSI) 来构建和更新该表。在定位阶段,算法从表中选择最佳近似值。与其他算法相比,该算法的平均准确度为 75%,显示了衰落信道与节点位置之间的良好关系。尽管如此,作者表明,与房间中间的位置相比,靠近墙壁/障碍物的估计误差更大。这是因为靠近障碍物的位置存在多径。达到的最大误差为 0.35 m10 × 8.810×8.8平方米面积。位置误差取决于房间大小和为分析选择的位置。
[ 20 ]中的作者使用接收到的信号强度来估计 WSN 中假设视线 (LOS) 中的节点距离。然而,对于高度变化的环境,不存在 LOS 可能会导致更高的定位误差。作者在 [ 21] 提出了一种基于 RSSI 测距范围的定位算法,该算法在传播模型中使用固定参数来减少 RSSI 测距误差。然而,所提出的算法创建了 RSSI 值和参数距离范围的一对一映射,并且还涉及矩阵求逆以估计未知坐标。这使得算法变得复杂并且不太适合人口稠密的室内环境。该算法使用距离优化和质心核心三角测量技术。该算法针对固定障碍物进行了优化,并为移动障碍物提供了不确定性。作者在 [ 1]提出了一种使用超宽带(UWB)和微机电系统(MEMS)定位系统的改进鲁棒自适应算法。然而,所提出的 UWB-MEMS 方法在室内环境中容易受到 NLOS 误差的影响,从而导致定位精度低。
[ 11 ]中的作者提出了一种使用多目标优化的 Wi-Fi 定位自适应算法。该算法通过将经验模型的实际结果与测量位置误差的测试结果进行比较来工作。在任何特定时刻,使用位置误差较小的算法来呈现整体结果。因此,位置精度仍然是一个悬而未决的问题,因为即使以前的测试运行良好,但当前的测量仍然容易出现多路径。在 [ 22 ] 中,作者为室内定位系统开发了一种稳健的三边测量算法。作者使用了 [ 20]中提供的标签和读者排列] 假设 RSSI 模式分布在所有区域都相同,从而获得位置估计。该技术适应室内环境的变化,但在实际估计相交区域的扩展/缩小因子时容易出错。[ 23 , 24 , 19 , 15 , 11 ]表明,自适应算法强烈依赖于训练阶段(在离线阶段,记录所需的预信息)存储的信息。这增加了内存和电源要求,以实现准确的位置估计[ 4、17、14 ]。
为了应对这一挑战,这项工作提出了一种使用圆扩展方法的自适应三边测量算法。该算法使用改进的三边测量方法和 RSSI 距离技术在室内工厂环境中进行定位和导航。这项工作通过在基本三边测量算法中引入自适应圆扩展阶段扩展了 [ 8 ]的工作。目的是在基于 RSSI 的三边测量算法中使用参考节点来提高目标节点距离估计的准确性。BLE、Wi-Fi、ZigBee 和 LoRaWAN 等物联网无线技术用于评估所提出的室内定位系统的精度误差性能。这项工作使用在线提供的 RSSI 数据集。脚注1对现有的基于 RSSI 的自适应室内定位算法进行了比较,以获得距离误差性能的估计能力。使用 PYTHON® 仿真平台评估以米为单位的距离误差性能。
材料和方法
RSSI-距离关系
基于RSSI的定位具有成本低、精度高等优点,适用于大规模应用。但是,它的稳定性较低,因为 RSSI 容易被阻塞,并且容易受到物体和环境影响的干扰。由于多径衰落,即使在控制良好的室内场景中,RSSI 通常也不稳定。文献[ 25 ]中的作者对RSSI-距离关系进行了实验,结果如图1所示。实验设置的信标(发送器)距离 1 米,并直接面向移动设备(接收器)。结果显示 RSSI 从 -80dB 到 -61dB 剧烈变化。因此,作者必须在处理之前删除 RSSI 的异常值。这项工作采用了 [25 ]。单向异常值去除应用于 RSSI,因为 RSSI 由于室内多径衰落而趋于下降。在进行任何进一步处理之前,需要删除 RSSI 的异常值。尽管如此,[ 26 ]中的作者使用 Wi-Fi 嗅探器进行了一项实验,发现强信号比弱信号在目标位置估计中具有更高的置信度,因此,去除异常值成为一项简单的练习。
图。1
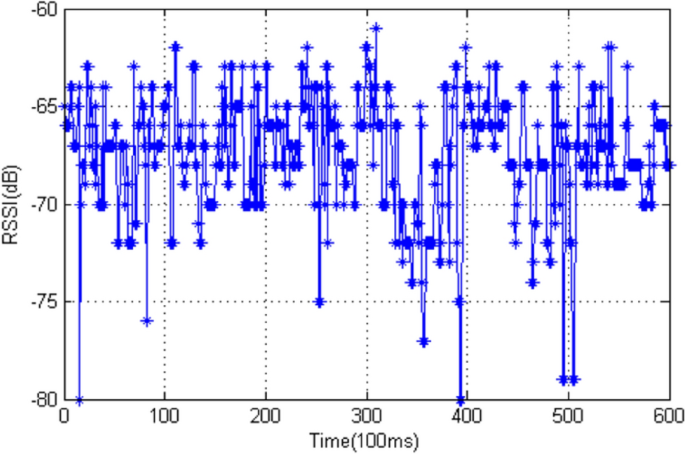
1 米距离内的样本 RSSI 值 [ 25 ]
所提出的自适应算法使用 RSSI 分布特性来寻找位置估计的最佳距离。这是通过对距离估计的最大 RSSI 值进行排序和选择来完成的。对数正态室内传播模型用于对基于 RSSI 的室内传播进行建模,如 [ 27 ] 中所述。该模型表示为(1):
其中 PL(d 0 ) 是参考距离d 0的路径损耗值,η是路径损耗指数,X σ是具有零均值和方差的高斯随机变量,,它模拟了 RSSI 值的随机变化。σ2个σ2
提出的自适应三边测量算法
三边测量算法使用 RSSI 测量来估计标签(目标节点)和阅读器(参考节点)之间的距离 [ 28 ]。参考位置和目标位置之间的距离可以被认为是许多以每个参考位置为中心的圆的半径。因此,目标位置是所有球面的交点。这项工作采用了 [ 22 ]中导出的标签距离关系。
图 2取自 [ 22 ]的工作,以简化的方式描述了参考节点(A、B 和 C)和目标节点(T1)的布置。参考传感器节点位于三角形区域的角上。这种方法只需要三个参考节点进行三边测量。节点A( x 1 ,y 1 )和B( x 2 ,y 2 )用于获取值,而C( x 3 ,y 3 )和A( x 1 ,y 1 )用于获取\ (x\)值获得值;因此
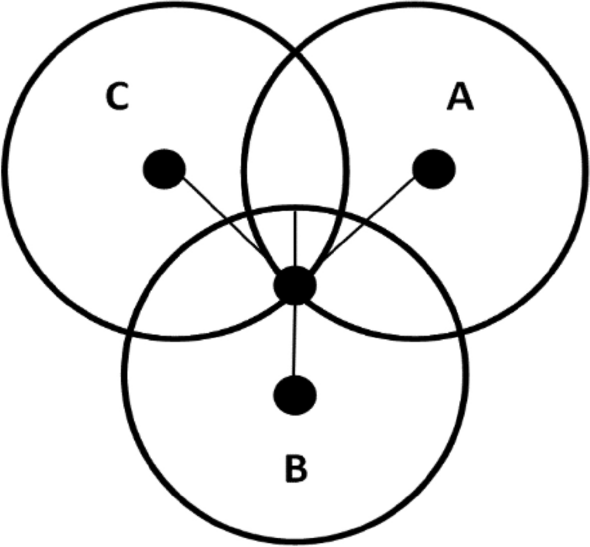
接收到的信号功率受传播损耗的影响,并且对信道干扰、衰减、反射、衰落和阴影敏感 [ 20 ]。这种方式标签的位置容易出错,因为交点受RSS值的影响。由于干扰、多径和噪声,三个圆可能不与公共点相交,如图3所示。两个圆 A 和 B 相交于一点,但圆 C 不相交。同样可以在图4中看到,其中所有三个圆也不在公共点相交,因此在这种情况下,增加锚点的数量可以获得更好的结果。
图 3
两个圆 A 和 B [ 20 ]的交点
传感器节点/阅读器之间的距离(d 1、d 2和d 3)是使用对数距离路径损耗模型将 RSSI 值转换为与前一过程的距离而获得的。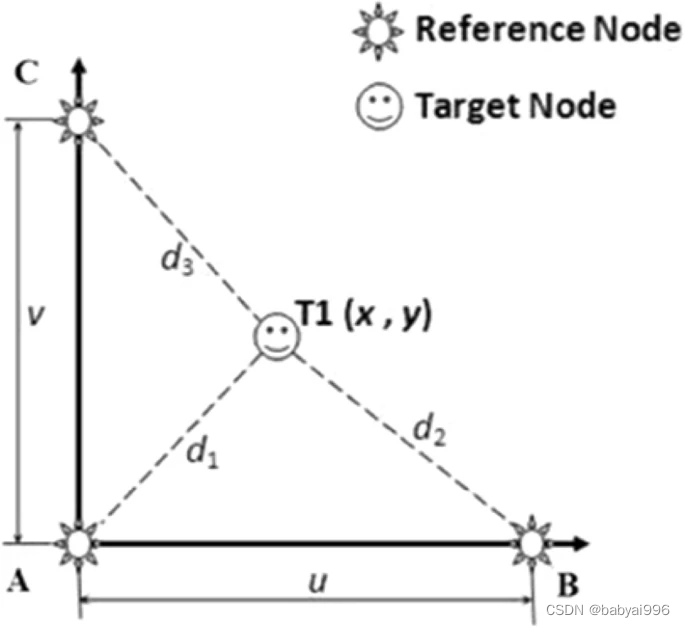
在环境 1 中,BLE 产生了 0.666 米的误差,而在环境 2 中则为 0.773 米。使用建议的自适应圆扩展方法,LoRaWAN 已证明在环境 1 中具有 0.562 米的最佳错误性能。但其0.793米的综合性能是四种技术中最差的。Wi-Fi 已证明是环境 1 中第二好的技术(0.651 米)和环境 2 中的最佳技术(0.384 米)。Wi-Fi的综合性能依然以0.517米位列第一。ZigBee 在环境 1 中性能最低,为 0.671 米,在环境 2 中性能第三,为 0.811 米。它还被证明以 0.741 米的总成绩排名第三。
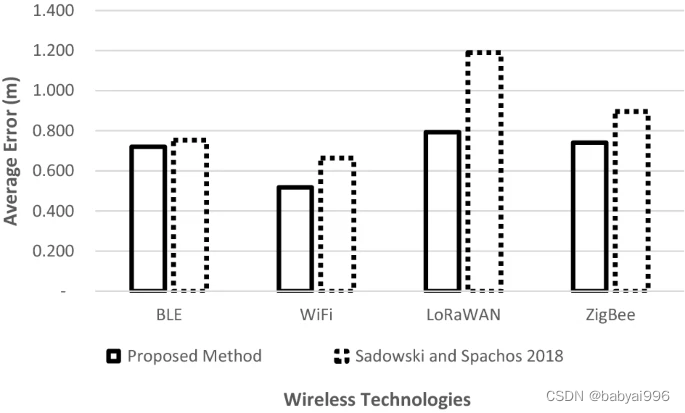
环境 1 对 LoRaWAN 技术具有更好的优势,其信号可以传输更远的距离且障碍物、反射和衍射更少。在环境 2 中,LoRaWAN 由于房间内物体数量的增加而恶化。还观察到,由于干扰量较小,在测试点 D2 处 1、3 和 5 米的所有距离处,Wi-Fi 在两种环境中均具有最佳性能。然而,如图8所示,在三角形的边缘,设备经历了高干扰水平,因此降低了估计精度。图9将所提出方法的整体性能与 (Sadowski and Spacho, 2018) 所做的现有工作进行了比较。据观察,所提出的方法在估计精度方面优于现有方法,BLE 提高 4%,ZigBee 提高 17%,Wi-Fi 提高 22%,LoRaWAN 提高 33%。
在这项研究中,将适应阶段纳入三边测量算法揭示了有用的见解。总体而言,据观察,Wi-Fi 和 BLE 无线技术的错误性能有所提高。Wi-Fi 产生最佳估计,平均误差为 0.517 米。然而,Wi-Fi 设备使用主电源,这给电池供电设备带来了功耗挑战。另一方面,BLE 具有第二高的精度,平均误差为 0.719 米。BLE 信标也是耗电量最少的系统,但它在所有测试设备中的传输范围最短。此外,由于 BLE 的低电流消耗,可以使用可充电电池为设备供电,从而降低整个系统的成本。使用 BLE 的主要缺点是由于传输范围较差,不适合大面积覆盖,因此需要额外的设备。还观察到,由于远程功能需要更少的节点,LoRaWAN 可能是一种具有成本效益的技术。但是,相对于BLE技术,其高功耗带来了挑战。实验结果证实,尽管 Wi-Fi 技术的平均错误性能更好,但由于其便携性和电池供电能力,BLE 可能是最佳选择。然而,Wi-Fi 和 LoRaWAN 分别是中距离和更远距离的理想选择。还观察到,由于远程功能需要更少的节点,LoRaWAN 可能是一种具有成本效益的技术。但是,相对于BLE技术,其高功耗带来了挑战。实验结果证实,尽管 Wi-Fi 技术的平均错误性能更好,但由于其便携性和电池供电能力,BLE 可能是最佳选择。然而,Wi-Fi 和 LoRaWAN 分别是中距离和更远距离的理想选择。还观察到,由于远程功能需要更少的节点,LoRaWAN 可能是一种具有成本效益的技术。但是,相对于BLE技术,其高功耗带来了挑战。实验结果证实,尽管 Wi-Fi 技术的平均错误性能更好,但由于其便携性和电池供电能力,BLE 可能是最佳选择。然而,Wi-Fi 和 LoRaWAN 分别是中距离和更远距离的理想选择。
结论
已经表明,对室内环境进行建模具有挑战性,尤其是在存在墙壁、家具、电子设备以及人员和物体在狭小密闭空间内移动的情况下。这迫使室内定位系统特定于给定环境,因此缺乏适当的标准。本研究工作提出了一种适用于基于 RSSI 的室内定位系统的自适应三边测量算法。所提出的算法通过调整表示通信设备的信号覆盖范围的相交圆的估计距离来适应不同环境中的变化。包括Wi-Fi、BLE、ZigBee和LoRaWAN在内的物联网通信技术被用来提供相互连接并形成WSN,这可以促进室内定位过程。结果表明,与现有相关文献相比,BLE 的准确性提高了 4%,ZigBee 提高了 17%,Wi-Fi 提高了 22%,LoRaWAN 提高了 33%。这些结果表明,如果将三边测量与自适应圆扩展阶段相结合,可以获得改进的位置精度。同样,结果对室内定位算法的选择提供了进一步的见解。















 309
309











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











