







室内定位传感器方案汇总
目录
1、定位方案概述
1.1、内定位系统有最基本的5种算法:
(1)起源蜂窝小区技术;
(2)时间到达法(TOA);
(3)时间到达差法(TDOA);
(4)信号强度法(RSSI);
(5)到达角度差法(AOA)。
1.2、常用的室内定位技术主要包括以下几种:
(1)基于超声波定位技术;
(2)基于红外线的定位技术;
(3)基于超宽带的定位技术;
(4)射频识别定位技术(WLAN、ZigBee、蓝牙);
(5)基于激光传感器的定位技术;
(6)基于视觉的定位技术;
1.3、定位理论
定位理论有两种:地图的定位方法以及基于未知地图的定位方法。
基于已知地图定位方法:顾名思义,就是事先获取机器人的工作环境地图(高精度地图),然后根据高精度地图结合激光雷达及其它传感器通过定位算法获得准确的位置估计。室外无人驾驶技术普遍采用的是基于已知地图的定位方法。
基于位置地图的定位方法:指在地图和机器人的位置都事先未知的情况下,要求机器人在一个完全未知的环境中从一个未知的位置出发,在递增地建立环境的导航地图,同时利用已建立的地图来同步刷新自身的位置。该问题被称作同步定位和构图,简称 SLAM。
1.4、不同的定位方案对比
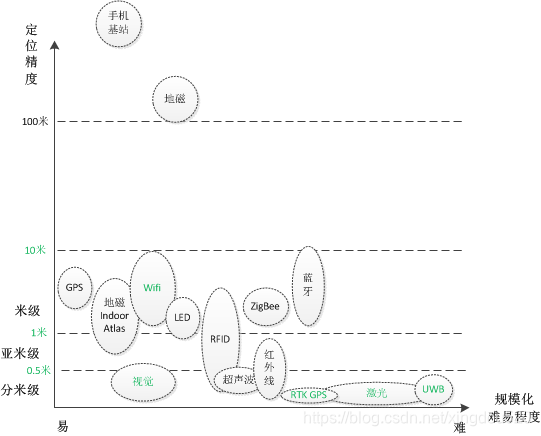
(注:定位精度在0.1米~0.5米 ,通常称为分米级定位;定位精度在0.5米~1米,称为亚米级定位;定位精度在1米~10米则称米级定位。 )
| 定位技术 |
定位精度 |
可靠性 |
成本 |
| 激光 |
厘米级 |
高 |
高 |
| 视觉 |
分米级 |
中 |
中、低 |
| RFID |
1-10米 |
中 |
低 |
| 蓝牙 |
1-10米 |
中 |
高 |
| WIFI |
2-10米 |
低 |
低 |
| ZigBee |
2-5米 |
中 |
低 |
| UWB技术 |
0.1-0.5米 |
高 |
高 |
| LED定位 |
1-2米 |
高 |
高 |
| 红外定位 |
亚米级 |
低 |
高 |
| 超声波定位 |
0.5米 |
低 |
高 |
2、各种定位方案详细介绍
2.1、单线激光定位
技术类型:单线激光
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3207
3207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









