







 本文介绍了如何从海康机器人官网下载MVSforLinux版本,包括下载文件、使用`sudo`解压并安装,以及如何启用两个网卡并手动设置IPv4地址进行网络连接。
本文介绍了如何从海康机器人官网下载MVSforLinux版本,包括下载文件、使用`sudo`解压并安装,以及如何启用两个网卡并手动设置IPv4地址进行网络连接。
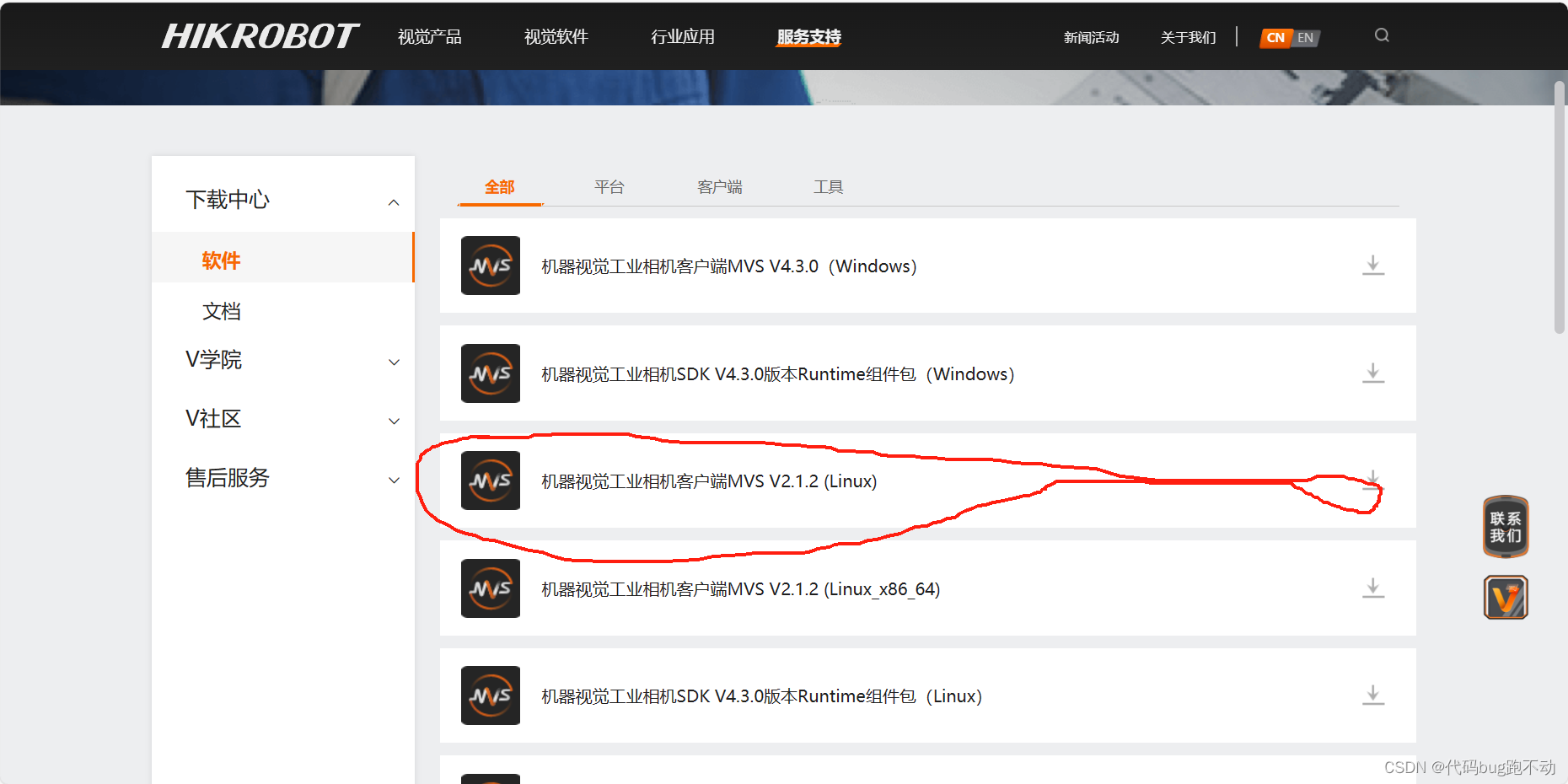
在官网下载MVS(Linux)版本两个连接都可以
海康机器人-机器视觉-下载中心 (hikrobotics.com)
https://www.hikrobotics.com/cn2/source/support/software/MVS_STD_GML_V2.1.2_231116.zip
然后提取文件,在进入文件,输入命令切换超级管理员 sudo su
解压提取文件MVS-2.1.2_x86_64_202311224.deb文件 一定要以命令的方式
dpkg -i MVS-2.1.2_x86_64_202311224.deb
然后在进入opt/MVS/bin文件下打开终端输入 ./MVS 回车进入
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1940
1940

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









