






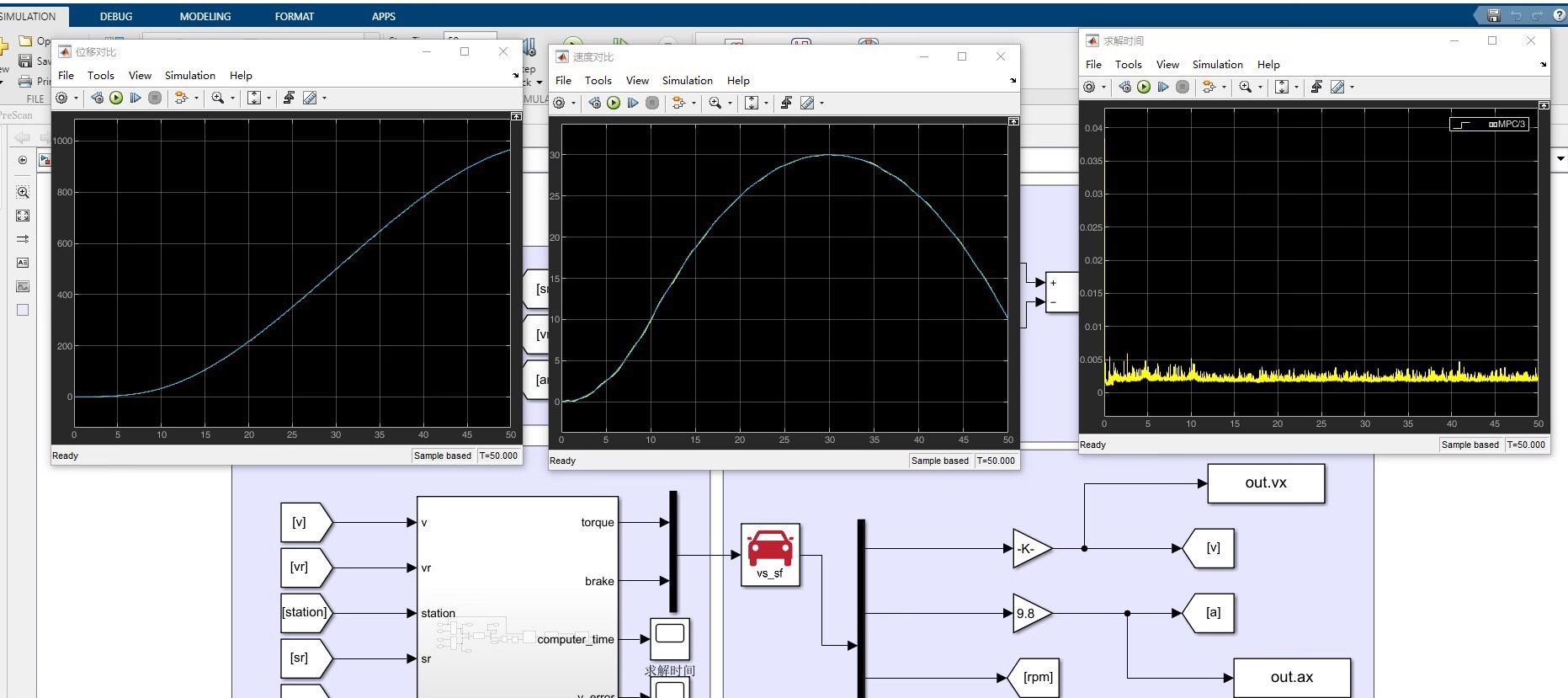
自动驾驶纵向控制-mpc实现纵向位置跟踪
不同于速度控制只考虑速度误差,位置跟踪需要考虑速度误差和位置误差
纵向控制已经制作好油门刹车标定表,无需自己做标定。
ID:4350708497749902
阿Xin的自动驾驶小店


自动驾驶技术是当今科技领域的热门话题之一。在自动驾驶系统中,纵向控制是实现车辆位置跟踪的重要组成部分。传统的速度控制只考虑车辆速度误差,而纵向位置跟踪需要同时考虑速度误差和位置误差。
纵向位置跟踪在自动驾驶系统中起着举足轻重的作用。它通过控制车辆的油门和刹车来实现跟踪期望的位置轨迹。而传统的控制方法往往只考虑速度误差的调整,忽略了车辆位置误差对控制效果的影响。因此,纵向位置跟踪的实现需要采用更加精确的控制策略。
在自动驾驶系统中,纵向位置跟踪可通过模型预测控制(Model Predictive Control,MPC)来实现。MPC是一种基于模型的预测控制方法,通过建立车辆动力学模型和环境模型,预测未来一段时间内的车辆行驶情况,并根据预测结果进行优化控制。通过MPC算法,可以在考虑车辆动力学约束和环境限制的情况下,实现车辆位置的精确跟踪。
在纵向位置跟踪中,油门和刹车标定表起到了重要作用。标定表是根据车辆制造商提供的车辆动力学参数和测试数据进行建模和标定得到的。通过标定表,可以对不同速度和位置下的油门和刹车进行合理的控制,从而实现对车辆位置的精确跟踪。在实际应用中,通常可以直接使用已经制作好的标定表,无需自己进行标定。
综上所述,自动驾驶系统中的纵向控制-mpc实现纵向位置跟踪是一项重要的技术。通过考虑速度误差和位置误差,采用MPC算法,并结合油门和刹车标定表,可以实现对车辆位置的精确跟踪。这种控制策略能够提高自动驾驶系统的安全性和稳定性,为实现自动驾驶的商业化应用提供了有力支持。
在未来的发展中,纵向位置跟踪技术还有很大的进步空间。通过对车辆动力学模型和环境模型的进一步研究和建立,以及对MPC算法的改进和优化,可以进一步提高纵向位置跟踪的控制精度和效果。同时,还可以将机器学习和人工智能等技术引入纵向位置跟踪中,实现更加智能化和自适应的控制策略。
总之,自动驾驶系统中的纵向控制-mpc实现纵向位置跟踪是一项关键的技术。通过采用MPC算法并结合油门和刹车标定表,可以实现车辆位置的精确跟踪,提高自动驾驶系统的安全性和稳定性。未来,随着技术的不断发展和创新,纵向位置跟踪技术将继续取得突破性进展,为实现自动驾驶的商业化应用开辟新的可能性。
以上相关代码,程序地址:http://wekup.cn/708497749902.html















 579
579

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









