






自动驾驶纵向控制-mpc实现纵向位置跟踪
不同于速度控制只考虑速度误差,位置跟踪需要考虑速度误差和位置误差
纵向控制已经制作好油门刹车标定表,无需自己做标定。
ID:4350708497749902
阿Xin的自动驾驶小店
自动驾驶技术一直以来都是人工智能领域的热门话题之一,其中纵向控制是实现自动驾驶的重要组成部分之一。纵向控制主要负责控制车辆的速度和位置,使其能够准确地跟踪预定的路径并保持一定的安全距离。
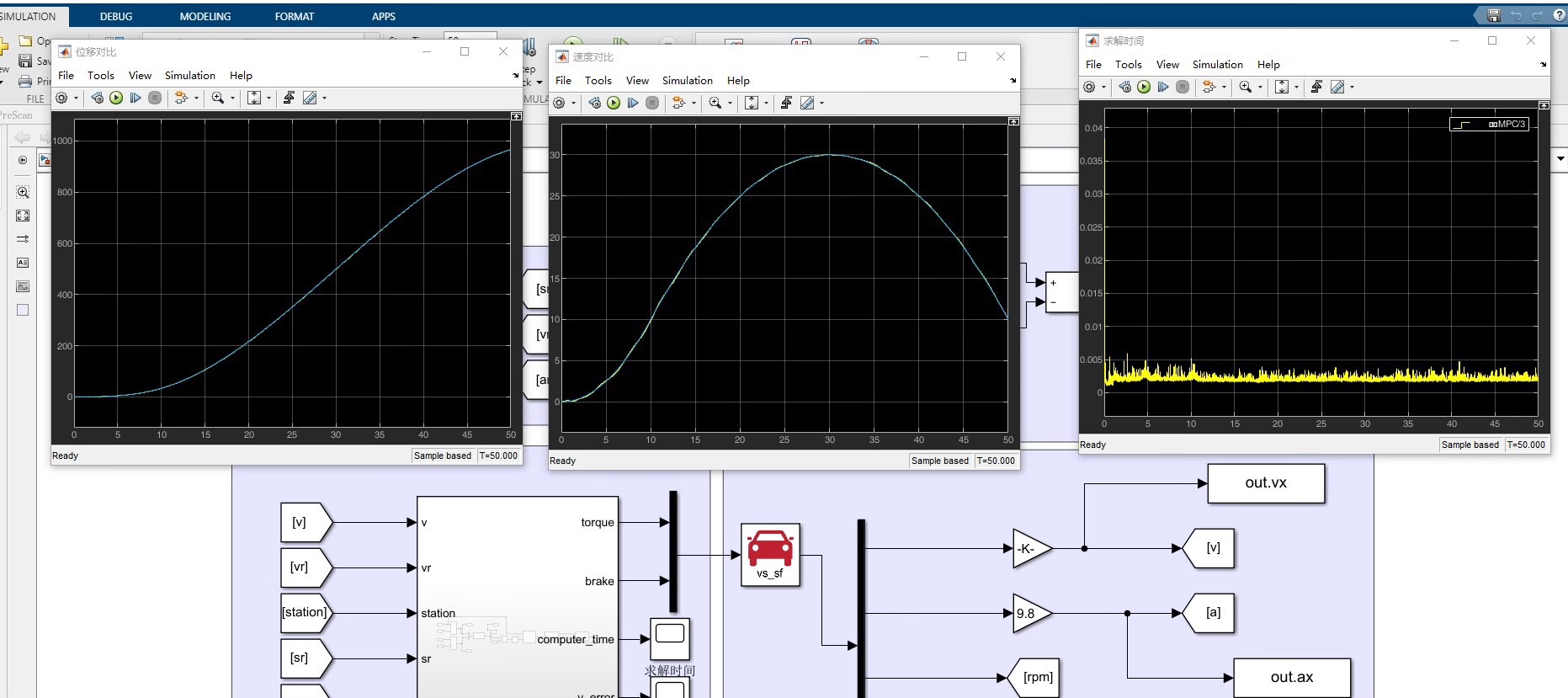
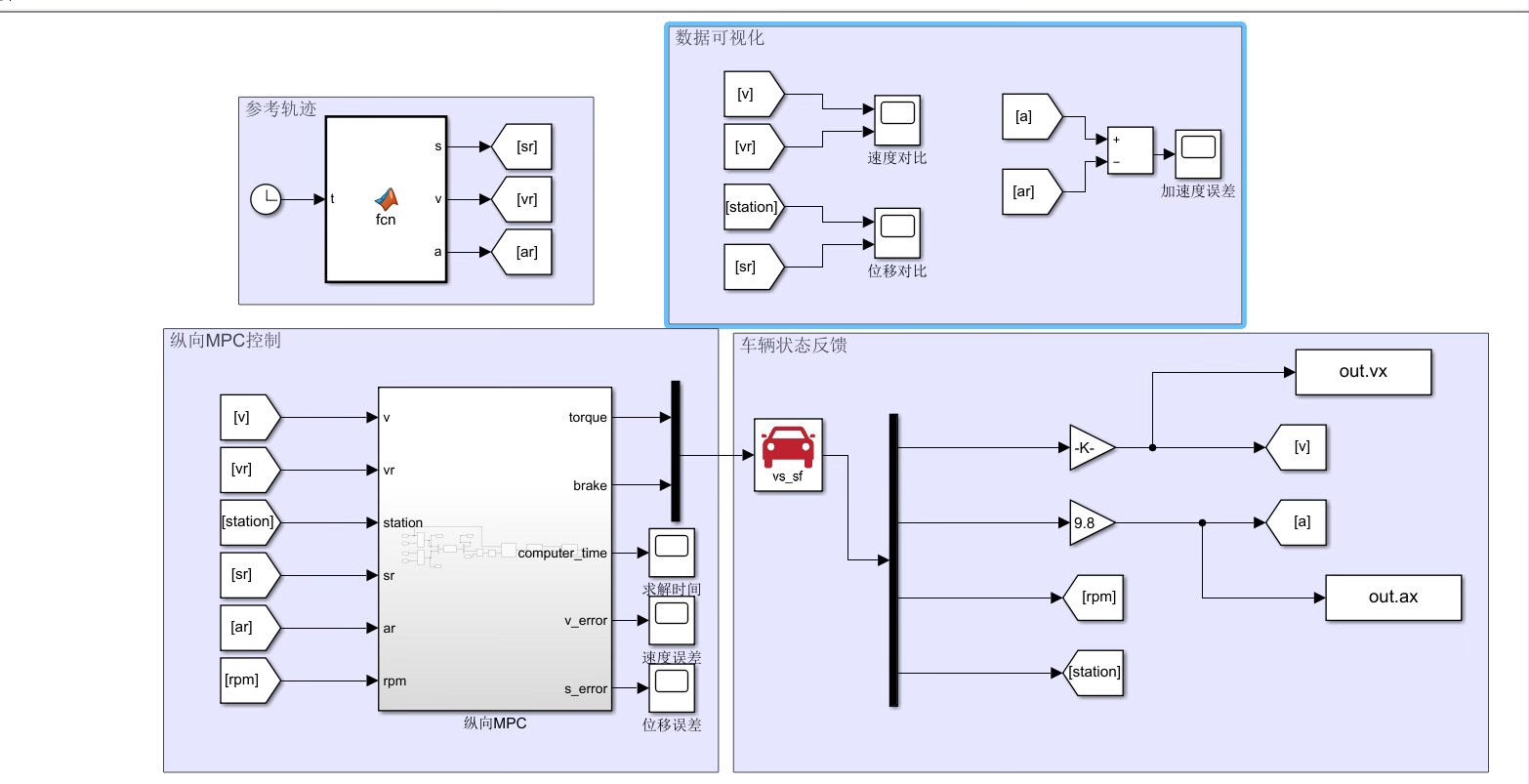
在纵向控制中,为了实现位置跟踪,我们需要考虑速度误差和位置误差两个方面。速度误差指目标速度与实际车速之间的差异,而位置误差则是指车辆当前位置与目标位置之间的差异。通过综合考虑这两个误差,我们可以更精确地控制车辆的运动,实现更准确的位置跟踪。
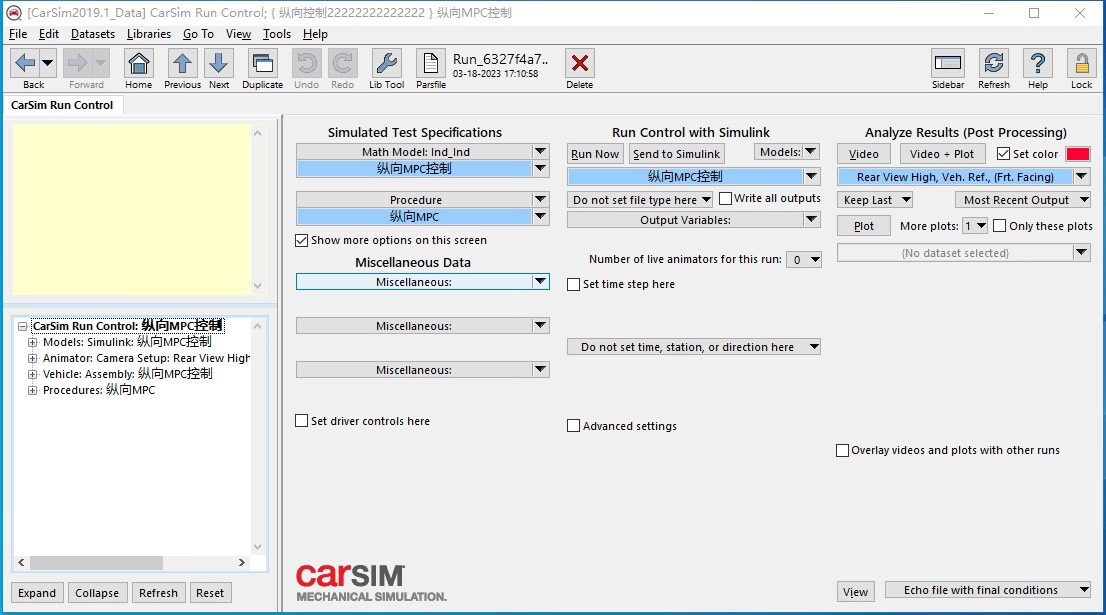
为了实现纵向控制的位置跟踪功能,一种常用的方法是采用模型预测控制(MPC)算法。MPC算法是一种基于模型的预测控制策略,它通过使用车辆动力学模型来预测未来一段时间内的车辆行驶情况,并根据预测结果进行控制决策。在纵向控制中,MPC算法可以通过预测车辆的位置和速度来计算出合适的油门和刹车指令,从而实现位置跟踪的目标。
在实际应用中,纵向控制中的油门和刹车指令需要根据车辆的具体性能进行标定。然而,在某些情况下,研发者可能已经制作好了油门和刹车的标定表,这时我们可以直接使用这些标定表而无需自己进行标定。这样可以大大简化开发过程,提高开发效率。
总结来说,自动驾驶的纵向控制涉及到位置跟踪的实现,需要综合考虑速度误差和位置误差。为了实现位置跟踪,我们可以采用模型预测控制(MPC)算法,通过预测车辆的位置和速度来计算出合适的油门和刹车指令。在实际应用中,我们可以利用已经制作好的油门和刹车标定表,避免重复的标定工作,提高开发效率。相信随着自动驾驶技术的不断发展,纵向控制的性能将得到进一步的提升,为实现更为安全和智能的自动驾驶交通提供更好的支持和保障。
【相关代码,程序地址】:http://fansik.cn/708497749902.html
















 4180
4180











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









