







最近沟通了一些关于新能源车的自动插枪,充电项目,发现这块的应用需求还挺多,类似应用场景有充电机器人、自动插枪(机械臂)。如视频:好看视频-轻松有收获
刚好,之前做过相关demo,与大家分享下视觉方面的技术方案,但由于敏感性,demo视频不便分享,且本文仅对视觉系统进行介绍。业内常用的技术方案有两种,基于3D模组的视觉定位系统,以及基于2D单目相机的视觉定位系统。先从自动插枪的一般流程说起(手眼标定,相机标定等基础知识不再赘述):
一、自动插枪的通用流程:
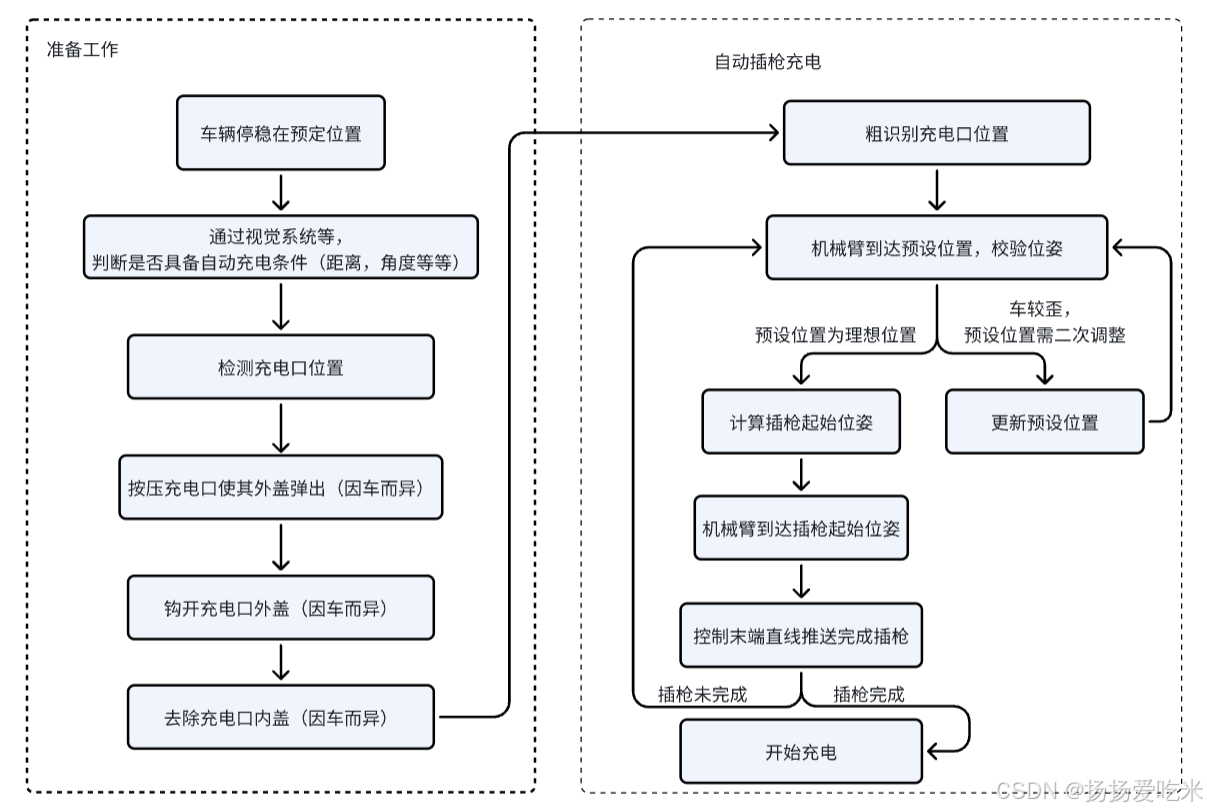 通常,在较新款的新能源车中,准备工作(上图左半部分)通常由自动泊车、油箱内外盖自动打开完成。视觉系统当然也可以处理此类任务,但整体流程相对复杂,此步骤不再赘述。
通常,在较新款的新能源车中,准备工作(上图左半部分)通常由自动泊车、油箱内外盖自动打开完成。视觉系统当然也可以处理此类任务,但整体流程相对复杂,此步骤不再赘述。
A、在自动插枪充电过程中,视觉系统首先对画面中的慢充/快充口进行图像目标检测,这一步的算法用yolo系列即可胜任,再结合3D信息等,计算汽车充电口的粗略三维位置。
B、根据粗略的三维位置,计算充电枪的初始预设位置。此步骤的目的,通常是使视觉系统更近距离的观察充电口(约10~30cm),以便更精确的计算充电口的精确三维位置
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 549
549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









