







3D物体从三维坐标映射到2D屏幕上,要经过一系列的坐标系变换,这些坐标系如下:
- model
物体本身(local)的坐标系,是相对坐标。
比如一个3D人物模型,头部某个点的坐标为(0,0,20),这是相对该模型的中心点(0,0,0)说的。当模型向前移动了5个单位,其中心点依旧是(0,0,0),头部那个点依旧是(0,0,20) - world
世界坐标系,即物体放在世界里的坐标,也就是大家最能理解的那个坐标。
还是上面的例子,他沿Z轴移动了5个单位后,中心点在世界坐标里变成了(0,0,5),头部那个点变成了(0,0,25)。
物体的位移,缩放,旋转会改变它的世界坐标,不会改变它的model坐标。 - image
相机坐标系。
相机也是世界里的一个物体,相机坐标就是以相机位置为坐标原点,相机的朝向为Z轴方向的坐标系。因为我们在电脑里看到的物体其实都是“相机”帮助我们看的,“相机”就是我们的眼睛,所以要以相机为标准进行坐标转换。
在model,world,image坐标系下,X,Y,Z的范围都是无穷大,只是坐标系的基准不一样而已。 - perspective (NDC, Normalized Device Coords)
透视坐标系。
这一步是将三维坐标向二维平面进行映射,经过透视变换之后,(x, y)的范围在[-1, 1],z的范围在[0, 1]
可能有点难以理解,本文后面会有专门解释。 - screen
屏幕坐标系。
因为屏幕是有分辨率的,比如1920×1080,所以还要再进行一次变换。
该坐标系的原点在屏幕左上角,x轴朝右,y轴朝下。x的范围在[0, xres-1],y的范围在[0, yres-1],即x是[0, 1920),y是[0, 1080)。
z值是[0, MAXINT],z=0就是屏幕那个平面,z=MAXINT就是无穷远。
经过这5个坐标系空间的变换,3维物体才最终投影到2维电脑平面上。
坐标系的变换矩阵
不清楚什么是变换矩阵,以及不清楚四维坐标的请看我之前的文章
1. 从model变到world
从模型本身的相对坐标变换到世界坐标,就是平移,旋转,缩放。
2. 从world变到image(相机坐标)
这一步是将物体在世界的坐标转换为相对相机的坐标。
相机也是世界里的物体,我们假定相机的中心点在世界里的位置是C(Cx, Cy, Cz)
相机正在看着某个方向,我们假定相机正在看的点的位置是I(Ix, Iy, Iz)
那么,相机的Z轴就是它看的方向的向量,即CI向量,也就是I - C = (Ix-Cx, Iy-Cy, Iz-Cz),我们将其标准化(即让它的模为1),得到Z轴单位向量。
然后我们取世界坐标系里的up向量(0,1,0)
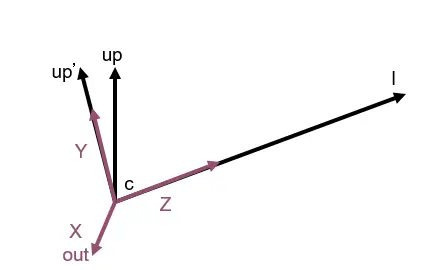
得到Z轴后求X, Y轴有两个方法:
方法1:
通过up叉乘Z(注意顺序),我们可以得到一个向量X1,将X1标准化(即使其模为1),我们就得到了X轴的单位向量。
在通过Z轴的单位向量与X轴的单位向量叉乘,即Z×X(注意顺序),我们就得到了Y轴的单位向量。
方法2:
up' = up - (up·Z)Z
注意:(Z的模是1)
将up'标准化得到Y,Y×Z = X
然后我们就可以构造Xiw这么一个将世界坐标系投影到相机坐标系的变换矩阵了。
如何构造?
1)世界坐标系中,相机原点为(Cx, Cy, Cz),在相机坐标系中为(0,0,0)
所以,(0, 0, 0) = Xiw*(Cx, Cy, Cz)
2)世界坐标系中,相机的三个轴为X+C(Xx+Cx, Xy+Cy, Xz+Cz), Y+C(Yx+Cx, Yy+Cy, Yz+Cz), Z+C(Zx+Cx, Zy+Cy, Zz+Cz),但在相机坐标系下为(1,0,0),(0,1,0),(0,0,1)
所以
(1, 0, 0) = Xiw*(Xx+Cx, Xy+Cy, Xz+Cz)
(0, 1, 0) = Xiw*(Yx+Cx, Yy+Cy, Yz+Cz)
(0, 0, 1) = Xiw*(Zx+Cx, Zy+Cy, Zz+Cz)
结合上面2步的四个式子,可以求出Xiw
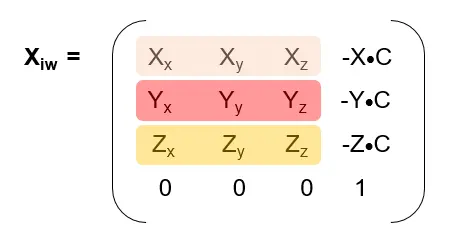
它的几何意义就是先把坐标系移动到相机的原点处(最后一列Cx,Cy,Cz),然后再旋转来调整到相机的X,Y,Z轴。
3. 从image变到perspective

z = -d是我们的观察点,而Z=0就是相机的胶片,或者我们的视网膜,场景要投射到Z=0这个二维平面上。
我们需要将在相机坐标系里的(0,Y,Z)这个点投到Z = 0这个平面上,即a点,a点坐标为(0,y,0)。
根据三角形相似可知:
y/d = Y/(Z+d)
y = Yd/(Z+d) = Y/[(Z/d)+1]
我们对X和Z做同样的操作,最终,一个相机坐标系里的点(X, Y, Z)会变成
(X/[(Z/d)+1],Y/[(Z/d)+1],Z/[(Z/d)+1]),这样就投射到了Z=0这个平面上了。
注意
我们也不一定非要投到Z=0这个平面,投到Z=1,Z=d的平面都可以,式子是一样的。
我们可以看出来,这个变换就是将坐标除了一个(Z/d)+1。
因此,将四维坐标转换为Perspective坐标的变换矩阵为
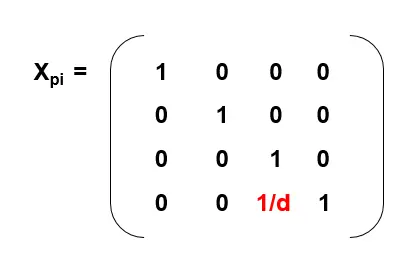
经过该矩阵变换之后的四维坐标为(X, Y, Z, Z/d+1),转换为三维坐标即为(X/[(Z/d)+1],Y/[(Z/d)+1],Z/[(Z/d)+1])
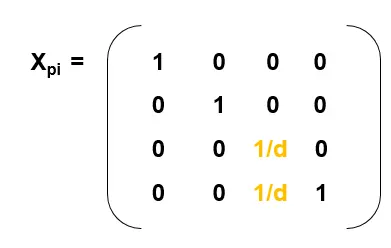
Perspective矩阵的定义的X, Y的范围在[-1,1],而X/[(Z/d)+1],Y/[(Z/d)+1]的范围是负无穷到正无穷,所以一旦X/[(Z/d)+1],Y/[(Z/d)+1]超出[-1, 1]的范围,就直接扔掉不显示在屏幕上了。
Perspective矩阵定义的Z的范围在[0,1],所以还要将Z进一步限制,所以最终的矩阵为
而这个d又是多少呢?
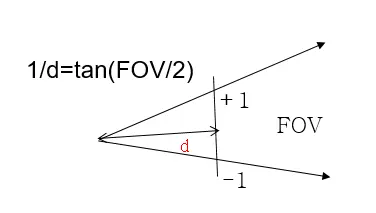
FOV (Field of View)是定义相机视锥垂直方向(y轴方向)的张角( 它是个角度),该张角与Z=0这个投影平面的交点是-1和1,因为x,y的范围是[-1,1]。
从上图可以看出,1/d就是tan(FOV/2)
4. 从perspective变到screen
定义屏幕分辨率为xs × rs
要将透视坐标系里的点映射过来,这个变换矩阵怎么构造?(参考Xiw)
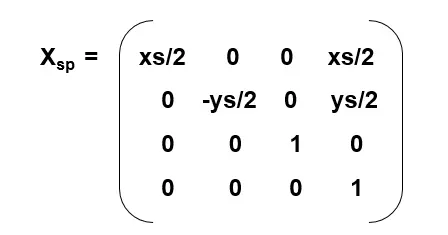
1)首先我们先构造一个4维标准矩阵,即对角线都是1,其余都是0。
2)屏幕坐标系的原点是左上角,而perspective里的原点(0,0)在屏幕中应该位于屏幕中央,即(xs/2, ys/2)。那么perspective里的原点(0,0)会映射为(xs/2, ys/2),即位移一个(xs/2, ys/2,0)。
所以4维矩阵的最后一列是(xs/2, ys/2,0,1)
3)屏幕坐标系中x的范围是[0, xs),y的范围是[0, ys)。而Perspective坐标系中x和y的范围是[-1,1],所以这个映射还要满足-1映射到0,1映射到xs或ys。
目前为止,我们的4维矩阵变成了这样:
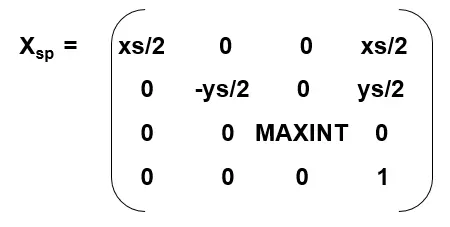
4)屏幕坐标系中z的范围是[0, MAXINT],Perspective坐标系中z是[0,1],所以再对z进一步限制,即1映射到MAXINT,得到最终结果。
所以,一个3D物体显示到电脑屏幕上,要经过4重坐标系变换。
screen Xsp perspective (NDC) Xpi image Xiw world Xwm model
在实际的渲染引擎运行中,Xsp和Xpi基本不会变,因为你的屏幕分辨率很少会变动。Xiw会在相机移动和旋转时改变。Xwm会在物体平移,旋转,缩放时改变。
作者:白痴毛
链接:https://www.jianshu.com/p/09095090c07f















 8314
8314











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









