









对于stm32芯片来说,步进电机的驱动由于要在中断中不断计算下一次脉冲的时间而极其消耗算力,使用计算的方法对于芯片的算法消耗更高,特别是在f1这种算力比较低的芯片上,这时候使用查表法是一种比较靠谱的方式,这里只给出部分代码思路。当然使用查表法的缺点就是在算力够用的情况下相比计算会没有那么平滑,但是在使用更多电机的时候查表法表现更好,计算会由于算力不足出现卡顿的情况。
一、定时器基础频率
首先就是定时器基础频率的选择,stm32f1定时器的基础频率设置是36M,在这个基础上肯定还是要分频的,为了移植方便,选择分频后的频率为100k,所以分频系数为360-1;
htim1.Init.Prescaler = 360-1;
至于period这个参数就无所谓了,反正在电机运动的时候这个会改变。
下面是定时器的参考配置:
/* TIM1 init function */
void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
//200khz
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 360-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 400-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}
二、驱动原理
使用查表法驱动步进电机使用了两个表,一个是加速表,即速度由慢到快S型曲线加速的过程,一个是速度表,通过这个表可以计算出下个定时器周期的自动重装载值。
加速度表就是一个S型曲线,通过MATLAB就能直接生成,速度表是根据计算得到的,我这里直接用EXCEL表做了,
因为在定时器处理中CCR的值为ARR的一半,所以计算的时候是200k,部分表格如下:
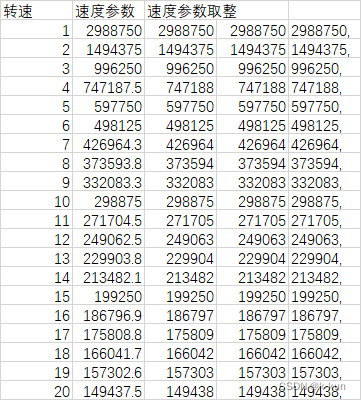
转速就代表每分钟多少转。
三、关键代码
加速段ARR:
TIM4->ARR = Motor[0].Speed / s_curve_table[Motor[0].count_step/Motor[0].Accdelay];
这里有个Accdelay,这个是指加速度延迟的倍数,因为加速度表只有那么长,在高速的时候加速就会显得很快,使用这个可以显著的把加速表进行延长。
匀速段ARR:
TIM4->ARR = Motor[0].Speed / s_curve_table[Motor[0].Acc_Len/Motor[0].Accdelay - 1];
减速段ARR:
else
{
TIM4->ARR = Motor[0].Speed / s_curve_table[(Motor[0].Dec_Len - X_cnt-1)/Motor[0].Accdelay ];
TIM4->CCR2 = TIM4->ARR / 2;
X_cnt++;
}

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











