







最近学习自定义光栅化渲染器,在学习矩阵变换的时候,求矩阵的逆矩阵的时候遇到的一些问题,特记录在此。
typedef struct MATRIX3X3_TYPE // 3×3矩阵
{
union
{
double M[3][3];
struct
{
double M00, M01, M02;
double M10, M11, M12;
double M20, M21, M22;
};
};
} MATRIX3X3, *MATRIX3X3_PTR;
typedef struct MATRIX4X4_TYPE //4×4矩阵
{
union
{
double M[4][4];
struct
{
double M00, M01, M02, M03;
double M10, M11, M12, M13;
double M20, M21, M22, M23;
double M30, M31, M32, M33;
};
};
} MATRIX4X4, *MATRIX4X4_PTR;
// 求 3x3 矩阵的逆矩阵
int _CPPYIN_Math::MatrixInverse(MATRIX3X3_PTR m, MATRIX3X3_PTR mi)
{
double det = m->M00*(m->M11*m->M22 - m->M21*m->M12) -
m->M01*(m->M10*m->M22 - m->M20*m->M12) +
m->M02*(m->M10*m->M21 - m->M20*m->M11);
if (abs(det) < EPSILON)
return 0;
double det_inv = 1.0/det;
mi->M00 = det_inv*(m->M11*m->M22 - m->M21*m->M12);
mi->M10 = -det_inv*(m->M10*m->M22 - m->M20*m->M12);
mi->M20 = det_inv*(m->M10*m->M21 - m->M20*m->M11);
mi->M01 = -det_inv*(m->M01*m->M22 - m->M21*m->M02);
mi->M11 = det_inv*(m->M00*m->M22 - m->M20*m->M02);
mi->M21 = -det_inv*(m->M00*m->M21 - m->M20*m->M01);
mi->M02 = det_inv*(m->M01*m->M12 - m->M11*m->M02);
mi->M12 = -det_inv*(m->M00*m->M12 - m->M10*m->M02);
mi->M22 = det_inv*(m->M00*m->M11 - m->M10*m->M01);
return 1;
}
// 求4x4 矩阵的逆矩阵
// m 源矩阵 mi 源矩阵的逆矩阵
int _CPPYIN_Math::MatrixInverse(MATRIX4X4_PTR m, MATRIX4X4_PTR mi)
{
// 矩阵的行列式
double det = ( m->M00 * ( m->M11 * m->M22 - m->M12 * m->M21 ) -
m->M01 * ( m->M10 * m->M22 - m->M12 * m->M20 ) +
m->M02 * ( m->M10 * m->M21 - m->M11 * m->M20 ) );
// 先判断行列式是否为0。
if (abs(det) < EPSILON)
return 0;
double det_inv = 1.0 / det;
mi->M00 = det_inv * ( m->M11 * m->M22 - m->M12 * m->M21 );
mi->M01 = -det_inv * ( m->M01 * m->M22 - m->M02 * m->M21 );
mi->M02 = det_inv * ( m->M01 * m->M12 - m->M02 * m->M11 );
mi->M03 = 0.0;
mi->M10 = -det_inv * ( m->M10 * m->M22 - m->M12 * m->M20 );
mi->M11 = det_inv * ( m->M00 * m->M22 - m->M02 * m->M20 );
mi->M12 = -det_inv * ( m->M00 * m->M12 - m->M02 * m->M10 );
mi->M13 = 0.0;
mi->M20 = det_inv * ( m->M10 * m->M21 - m->M11 * m->M20 );
mi->M21 = -det_inv * ( m->M00 * m->M21 - m->M01 * m->M20 );
mi->M22 = det_inv * ( m->M00 * m->M11 - m->M01 * m->M10 );
mi->M23 = 0.0;
mi->M30 = -( m->M30 * mi->M00 + m->M31 * mi->M10 + m->M32 * mi->M20 );
mi->M31 = -( m->M30 * mi->M01 + m->M31 * mi->M11 + m->M32 * mi->M21 );
mi->M32 = -( m->M30 * mi->M02 + m->M31 * mi->M12 + m->M32 * mi->M22 );
mi->M33 = 1.0;
return 1;
}如上,是求3x3矩阵和4x4矩阵的逆矩阵,大家都知道矩阵的逆 A-1 = A*/|A|,不知道的可以去看下线代课本。
前面3*3矩阵求法是一般的求法,先求矩阵的行列式|A|,如果不等于0的话,则有逆矩阵。接着求A*(伴随矩阵),这个求法是先求A的代数余子式,再转置即可。
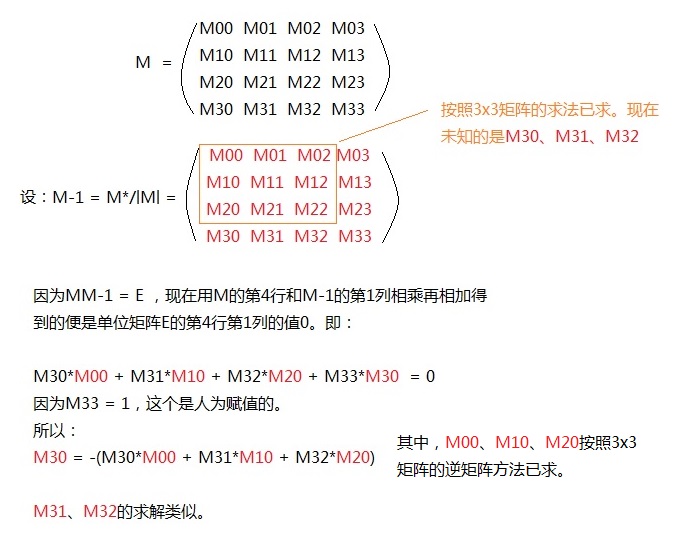
但是在求4x4矩阵的时候,前3行3列求解步骤和上面求3x3的逆是一样的,第四列,我们赋值0,0,0,1。因为在我们这个渲染器中顶点是以行向量的形式存在的,所以,第四列直接赋值,0,0,0,1,第四行才代表的是平移矩阵。如果是列向量的话,则正好相反,第四列代表平移矩阵,第四行赋值0,0,0,1。
言归正传,第四行的前3个参数的求法是不是有点诡异。是的,我们要说的就是这3个数是怎么求出来的。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









