






卡尔曼滤波。
(代码非常详细、非常齐全)
1、卡尔曼滤波的含义是现时刻的最佳估计为在前一时刻的最佳估计的基础上根据现时刻的观测值作线性修正。
2、卡尔曼滤波在数学上是一种线性最小方差统计估算方法,它是通过处理一系列带有误差的实际测量数据而得到物理参数的最佳估算。
1、包含噪声的,对物体位置的观察序列(可能有偏差)预测出物体的位置的坐标及速度。
3、这个估计可以是对当前目标位置的估计(滤波),也可以是对于将来位置的估计(预测),也可以是对过去位置的估计(插值或平滑)。
ID:2124768817712963
December


卡尔曼滤波:优化实时物体位置估计的统计方法
引言:
卡尔曼滤波是一种在实时系统中优化物体位置估计的统计方法。该方法基于数学模型,通过对一系列带有误差的实际测量数据进行处理,得到物理参数的最佳估计。本文将介绍卡尔曼滤波的基本原理、应用场景以及实现过程。
-
卡尔曼滤波的原理与定义
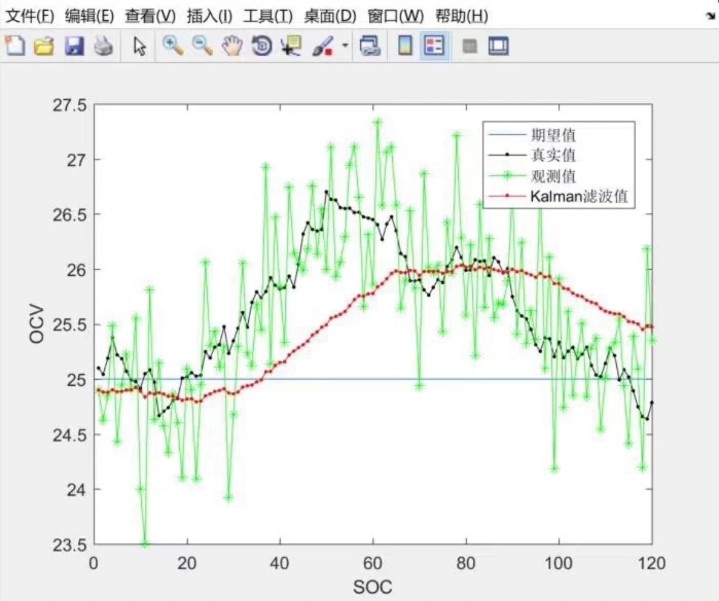
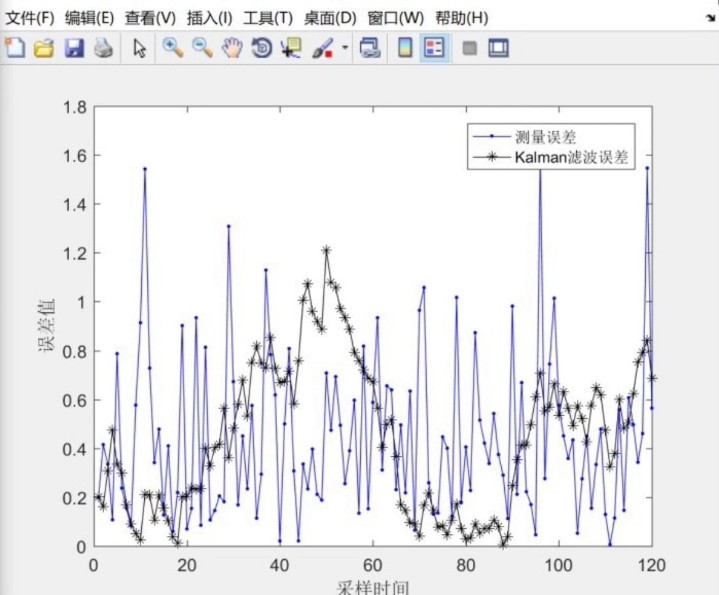
卡尔曼滤波的核心思想是,在现时刻的最佳估计基础上,根据现时刻的观测值进行线性修正,从而得到更精确的估计结果。它是一种线性最小方差统计估计方法,通过考虑测量误差和系统动态的不确定性,能够在噪声存在的环境下准确估计出物体的位置和速度。 -
卡尔曼滤波的应用场景
卡尔曼滤波在许多领域都有广泛的应用,尤其适用于需要对目标位置进行实时估计的系统。以下是一些常见的应用场景:
2.1 目标跟踪
卡尔曼滤波可以通过处理包含噪声的物体位置观察序列,预测出物体的位置坐标和速度。这样一来,我们可以实时跟踪目标的运动轨迹,对目标进行定位和追踪。
2.2 无线定位系统
在无线定位系统中,卡尔曼滤波可以通过处理接收到的信号强度数据,估计出移动设备的位置。这对于室内定位、导航和位置服务等应用非常有用。
2.3 航天器导航
在航天器导航中,卡尔曼滤波可以通过融合惯性测量单元(IMU)和卫星定位系统(GPS)的数据,提供更精确的位置和姿态估计,从而实现精准的导航和控制。
- 卡尔曼滤波的实现过程
卡尔曼滤波的实现过程可以分为以下几个关键步骤:
3.1 系统建模
首先,我们需要建立物理模型和观测模型,以描述系统的动态和观测行为。物理模型通常由状态方程和观测方程组成,而观测模型描述了观测值与真实状态之间的关系。
3.2 初始估计
在滤波开始时,需要对物体的初始状态进行估计。这可以通过预测或先验知识来获得。
3.3 预测步骤
在预测步骤中,我们使用物理模型对物体的状态进行预测,得到其在下一个时刻的估计值。预测步骤还会考虑系统噪声的影响,使得估计结果更加准确。
3.4 更新步骤
在更新步骤中,我们使用观测模型将测量值与预测值进行比较,从而修正估计结果。此时,卡尔曼增益起到关键作用,它根据观测误差和预测误差的权重,调整预测结果和测量值之间的比例关系。
3.5 迭代更新
为了实时跟踪目标的位置,卡尔曼滤波需要在每个时刻都进行迭代更新。每个时刻,我们根据上一时刻的估计结果和当前的观测值,进行预测和更新步骤,得到最新的位置估计。
结论:
卡尔曼滤波作为一种优化实时物体位置估计的统计方法,可以在噪声存在的环境下准确估计出物体的位置和速度。它在目标跟踪、无线定位系统和航天器导航等领域有着广泛的应用。通过建立系统模型、初始化估计、预测和更新步骤的迭代过程,卡尔曼滤波能够实现实时跟踪和定位的任务。
注:本文主要是针对卡尔曼滤波的基本原理和应用进行介绍,没有提供具体的实现代码和参考资料。如需进一步研究和应用,请参考相关文献和技术资料。
以上相关代码,程序地址:http://wekup.cn/768817712963.html















 6266
6266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









