







论文地址:UNSUPERVISED REPRESENTATION LEARNING WITH DEEP CONVOLUTIONAL GENERATIVE ADVERSARIAL NETWORKS
源码地址:DCGAN in TensorFlow
DCGAN,Deep Convolutional Generative Adversarial Networks是生成对抗网络(Generative Adversarial Networks)的一种延伸,将卷积网络引入到生成式模型当中来做无监督的训练,利用卷积网络强大的特征提取能力来提高生成网络的学习效果。
DCGAN有以下特点:
1.在判别器模型中使用strided convolutions来替代空间池化(pooling),而在生成器模型中使用fractional strided convolutions,即deconv,反卷积层。
2.除了生成器模型的输出层和判别器模型的输入层,在网络其它层上都使用了Batch Normalization,使用BN可以稳定学习,有助于处理初始化不良导致的训练问题。
3.去除了全连接层,而直接使用卷积层连接生成器和判别器的输入层以及输出层。
4.在生成器的输出层使用Tanh激活函数,而在其它层使用ReLU;在判别器上使用leaky ReLU。
原论文中只给出了在LSUN实验上的生成器模型的结构图如下:
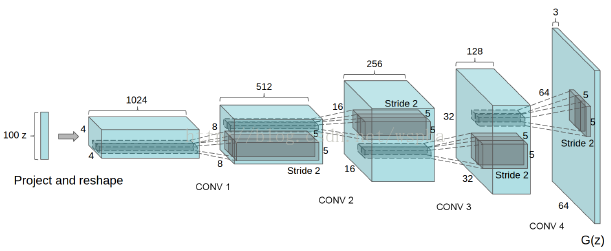
但是对于实验细节以及方法的介绍并不是很详细,于是便从源码入手来理解DCGAN的工作原理。
先看main.py:
with tf.Session(config=run_config) as sess:
if FLAGS.dataset == 'mnist':
dcgan = DCGAN(
sess,
input_width=FLAGS.input_width,
input_height=FLAGS.input_height,
output_width=FLAGS.output_width,
output_height=FLAGS.output_height,
batch_size=FLAGS.batch_size,
y_dim=10,
c_dim=1,
dataset_name=FLAGS.dataset,
input_fname_pattern=FLAGS.input_fname_pattern,
is_crop=FLAGS.is_crop,
checkpoint_dir=FLAGS.checkpoint_dir,
sample_dir=FLAGS.sample_dir)
再看model.py:
def discriminator(self, image, y=None, reuse=False):
with tf.variable_scope("discriminator") as scope:
if reuse:
scope.reuse_variables()
yb = tf.reshape(y, [self.batch_size, 1, 1, self.y_dim])
x = conv_cond_concat(image, yb)
h0 = lrelu(conv2d(x, self.c_dim + self.y_dim, name='d_h0_conv'))
h0 = conv_cond_concat(h0, yb)
h1 = lrelu(self.d_bn1(conv2d(h0, self.df_dim + self.y_dim, name='d_h1_conv')))
h1 = tf.reshape(h1, [self.batch_size, -1])
h1 = tf.concat_v2([h1, y], 1)
h2 = lrelu(self.d_bn2(linear(h1, self.dfc_dim, 'd_h2_lin')))
h2 = tf.concat_v2([h2, y], 1)
h3 = linear(h2, 1, 'd_h3_lin')
return tf.nn.sigmoid(h3), h3
def conv2d(input_, output_dim,
k_h=5, k_w=5, d_h=2, d_w=2, stddev=0.02,
name="conv2d"):
with tf.variable_scope(name):
w = tf.get_variable('w', [k_h, k_w, input_.get_shape()[-1], output_dim],
initializer=tf.truncated_normal_initializer(stddev=stddev))
conv = tf.nn.conv2d(input_, w, strides=[1, d_h, d_w, 1], padding='SAME')
biases = tf.get_variable('biases', [output_dim], initializer=tf.constant_initializer(0.0))
conv = tf.reshape(tf.nn.bias_add(conv, biases), conv.get_shape())
return conv
def generator(self, z, y=None):
with tf.variable_scope("generator") as scope:
s_h, s_w = self.output_height, self.output_width
s_h2, s_h4 = int(s_h/2), int(s_h/4)
s_w2, s_w4 = int(s_w/2), int(s_w/4)
# yb = tf.expand_dims(tf.expand_dims(y, 1),2)
yb = tf.reshape(y, [self.batch_size, 1, 1, self.y_dim])
z = tf.concat_v2([z, y], 1)
h0 = tf.nn.relu(
self.g_bn0(linear(z, self.gfc_dim, 'g_h0_lin')))
h0 = tf.concat_v2([h0, y], 1)
h1 = tf.nn.relu(self.g_bn1(
linear(h0, self.gf_dim*2*s_h4*s_w4, 'g_h1_lin')))
h1 = tf.reshape(h1, [self.batch_size, s_h4, s_w4, self.gf_dim * 2])
h1 = conv_cond_concat(h1, yb)
h2 = tf.nn.relu(self.g_bn2(deconv2d(h1,
[self.batch_size, s_h2, s_w2, self.gf_dim * 2], name='g_h2')))
h2 = conv_cond_concat(h2, yb)
return tf.nn.sigmoid(
deconv2d(h2, [self.batch_size, s_h, s_w, self.c_dim], name='g_h3'))
生成器以及判别器的输出:
self.G = self.generator(self.z, self.y)
self.D, self.D_logits = \
self.discriminator(inputs, self.y, reuse=False)
self.D_, self.D_logits_ = \
self.discriminator(self.G, self.y, reuse=True)
再看损失函数:
self.d_loss_real = tf.reduce_mean(
tf.nn.sigmoid_cross_entropy_with_logits(
logits=self.D_logits, targets=tf.ones_like(self.D)))
self.d_loss_fake = tf.reduce_mean(
tf.nn.sigmoid_cross_entropy_with_logits(
logits=self.D_logits_, targets=tf.zeros_like(self.D_)))
self.g_loss = tf.reduce_mean(
tf.nn.sigmoid_cross_entropy_with_logits(
logits=self.D_logits_, targets=tf.ones_like(self.D_)))优化器:
d_optim = tf.train.AdamOptimizer(config.learning_rate, beta1=config.beta1) \
.minimize(self.d_loss, var_list=self.d_vars)
g_optim = tf.train.AdamOptimizer(config.learning_rate, beta1=config.beta1) \
.minimize(self.g_loss, var_list=self.g_vars)
for epoch in xrange(config.epoch):
batch_idxs = min(len(data_X), config.train_size) // config.batch_size
for idx in xrange(0, batch_idxs):
batch_images = data_X[idx*config.batch_size:(idx+1)*config.batch_size]
batch_labels = data_y[idx*config.batch_size:(idx+1)*config.batch_size]
batch_images = np.array(batch).astype(np.float32)[:, :, :, None]
batch_z = np.random.uniform(-1, 1, [config.batch_size, self.z_dim]) \
.astype(np.float32)
# Update D network
_, summary_str = self.sess.run([d_optim, self.d_sum],
feed_dict={
self.inputs: batch_images,
self.z: batch_z,
self.y:batch_labels,
})
self.writer.add_summary(summary_str, counter)
# Update G network
_, summary_str = self.sess.run([g_optim, self.g_sum],
feed_dict={
self.z: batch_z,
self.y:batch_labels,
})
self.writer.add_summary(summary_str, counter)
# Run g_optim twice to make sure that d_loss does not go to zero (different from paper)
_, summary_str = self.sess.run([g_optim, self.g_sum],
feed_dict={ self.z: batch_z, self.y:batch_labels })
self.writer.add_summary(summary_str, counter)
errD_fake = self.d_loss_fake.eval({
self.z: batch_z,
self.y:batch_labels
})
errD_real = self.d_loss_real.eval({
self.inputs: batch_images,
self.y:batch_labels
})
errG = self.g_loss.eval({
self.z: batch_z,
self.y: batch_labels
})
counter += 1
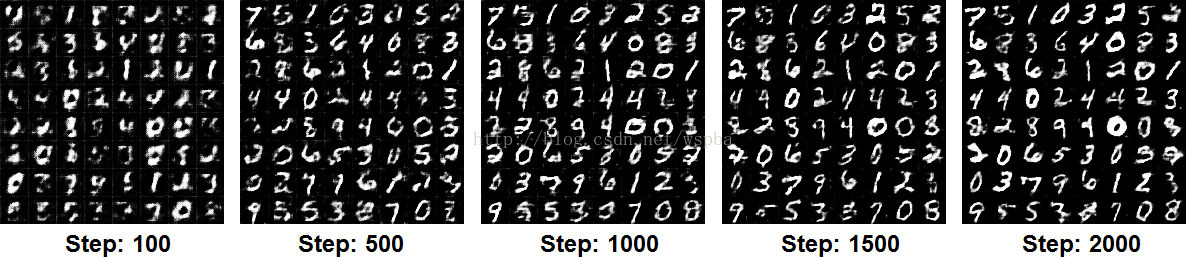
实验结果:
由于自己的笔记本配置有限,仅使用CPU来运行速度较慢,因此epoch仅设置为2,对于MNIST手写数字数据集的生成情况如下
注1:发现代码中以mnist为训练集的网络和以无标签数据集(以下简称unlabeled_dataset)为训练集的网络不同,结构有别。以下笔记主要针对前者(Generator=3个ReLU+1个Sigmoid,Discriminator=3个LeakyReLU+1个Sigmoid)。
注2:事实上,以unlabeled_dataset为训练集的网络也同原网页中所画的Generator有一些不同(事实上,区别是每个conv层的filter个数被减半了。原因可能为了减少网络参数利于测试者训练?)。除此以外,结构相同。Discriminator的结构与Generator的结构正好对称。
原代码中对于有label的数据集,Generator和Discriminator的网络结构均只有两个卷积层。
预备:batch_size=64, mnist图片大小28*28*c_dim,其中c_dim=1为颜色维数,类别数10;随机输入维数z_dim=100
Generator 部分
step1(获得输入z):服从均匀分布的输入样本z(shape=64,100)与具有one-hot形式的标签y (shape=64,10)级联,整体作为Generator的输入z (shape=64,110)
step2(获得第一个非线性层的输出h0): 通过线性变换将z变换为维数为gfc_dim=1024的数据,对其块归一化之后进行非线性ReLU变换,得到h0 (shape=64,1024);将h0与y级联,整体作为下一层的输入h0 (shape=64,1034)
step3(获得第二个非线性层的输出h1):通过线性变换将h0变换为维数为128*7*7=6272的数据,对其块归一化之后进行非线性ReLU变换,得到h1 (shape=64,6272);将h1进行reshape操作得到h1(shape=64,7,7,128);将h1与yb(yb为y的reshape形式,即最后一维为label维,yb的shape=64,1,1,10)级联,整体作为下一层的输入h1 (shape=64,7,7,139)
step4(获得第三个非线性层的输出h2):通过deconv2d操作,用128个filter,将h1变换为维数为64*14*14*128的数据,对其块归一化之后进行非线性ReLU变换,得到h2 (shape=64,14,14,128);将h2与yb级联,整体作为下一层的输入h2 (shape=64,14,14,139)
step5(获得最终的生成图像generated_image):通过deconv2d操作,用c_dim个filter,将h1变换为维数为64*28*28*1的数据,不做块归一化,进行非线性Sigmoid变换,得到generated_image(shape=64,28,28,1)
Discriminator 部分
step1(获得输入x):真实/生成图像image(shape=64,28,28,1)和yb(shape=64,1,1,10)级联,整体作为Discriminator的输入x(shape=64,28,28,11)
step2(获得第一个卷积层的输出h0):用c_dim+y_dim=1+10=11个大小为5*5*11的filter对输入x进行二维卷积操作,随后进行非线性LeakyReLU变换,得到h0 (shape=64,14,14,11);将h0与标签yb级联,整体作为下一层的输入h0(shape=64,14,14,21)
step3(获得第二个卷积层的输出h1):用df_dim+y_dim=64+10=74个大小为5*5*21的filter对h0进行二维卷积操作,块归一化(这层有)之后进行非线性LeakReLU变换,得到h1(shape=64,7,7,74);对h1进行reshape拉成每个样本对应一维数据,并与标签y (shape=64,10)级联,整体作为下一层的输入h1(shape=64,7*7*74+10=64,3636)
step4(获得第三个卷积层的输出h2):对h1进行线性变换,输出维数为dfc_dim=1024的数据,块归一化(这层有)操作之后进行非线性LeakyReLU变换,得到h2 (shape=64,1024);将h2与y进行级联,整体作为下一层的输入h2(shape=64,1034)
step5(获得最终输出h3):对h2进行线性变换,输出维数为1(用来判断真假)的数据,非线性Sigmoid变换之后得到最终输出h3 (shape=64,1) (注:实际代码中将线性变换之后的结果也进行了输出,用以计算loss)
Loss部分
真实图像和生成图像这两种图像都需要输入Discriminator得到对应的loss,整体作为Discriminator的loss;
而Generator的loss只包含有关生成图像部分;
用Adam训练,每训练两次Generator,才对Discriminator进行一次训练,防止Discriminator的loss的导数为0(无法更新)。
好吧,这样看着代码写出来的步骤简直太吃藕了,咱来用一下TensorBoard的功能,Generator和Discriminator的结构大概如下:















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









