






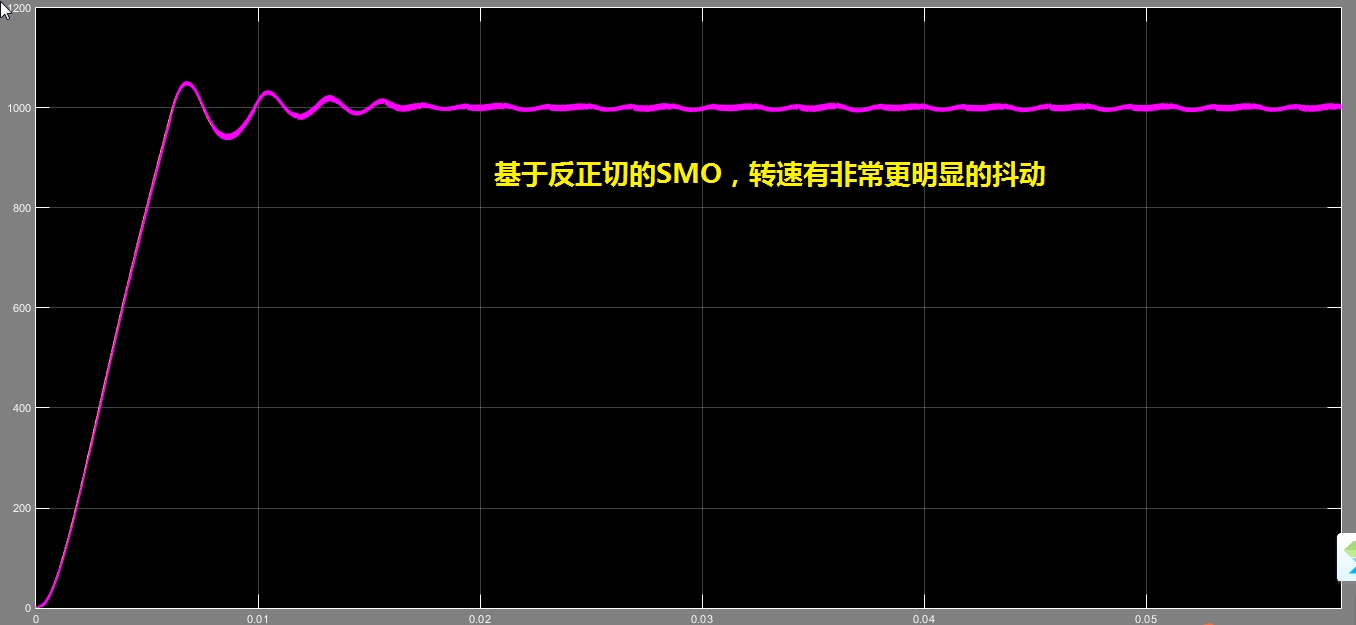
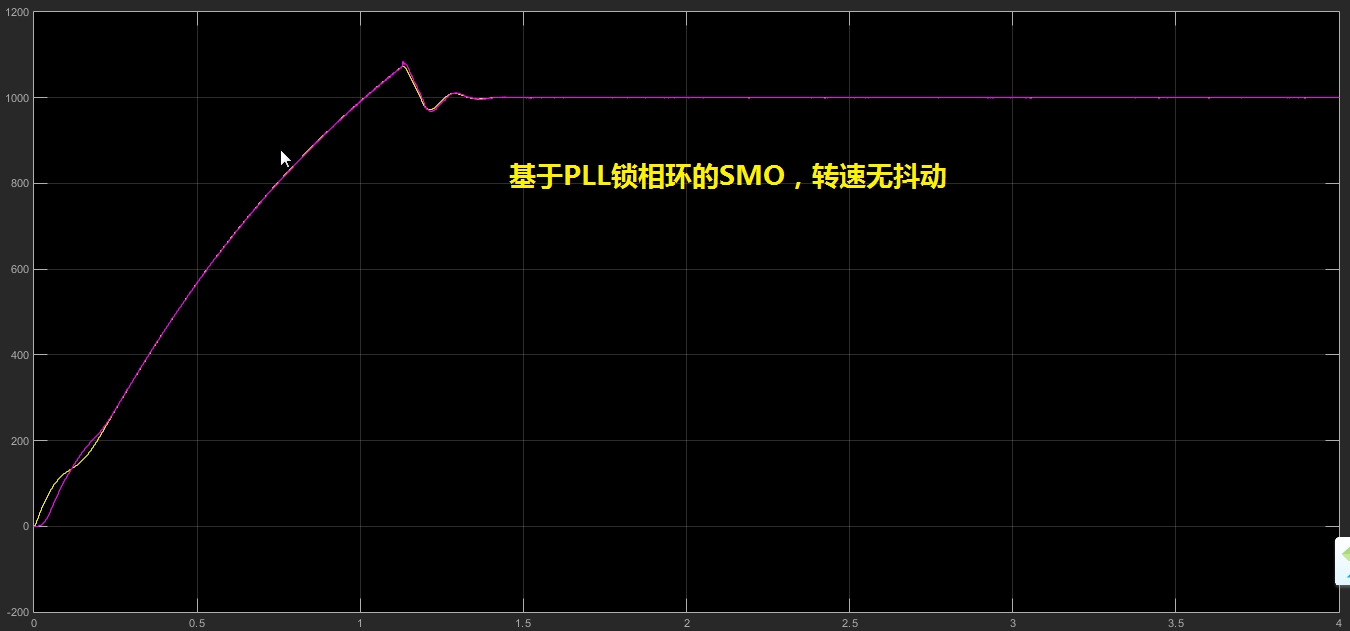
基于PLL的SMO滑模观测器算法,永磁同步电机无传感器矢量控制,跟基于反正切的SMO做对比,可以有效消除转速的抖动。
ID:2769675387822737
机器学习
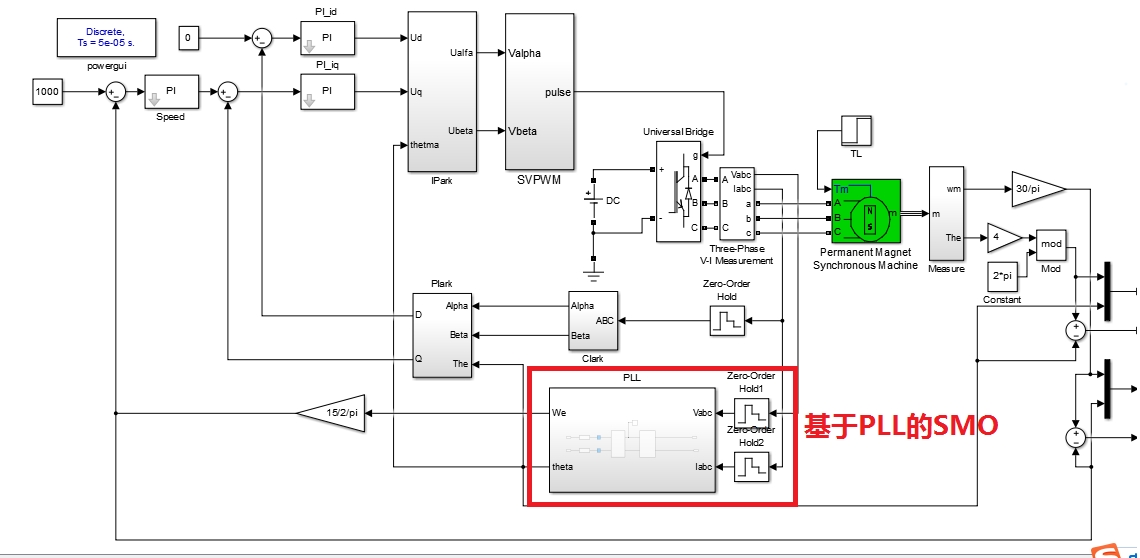
基于PLL的SMO滑模观测器算法,是一种用于永磁同步电机无传感器矢量控制的新颖方法。相比基于反正切的SMO算法,基于PLL的SMO滑模观测器算法能够有效消除转速的抖动,提高电机控制的性能和稳定性。
永磁同步电机是一种广泛应用于工业和家电领域的高性能电机。传统的永磁同步电机控制方法需要使用传感器测量电机的转速和位置信息,但传感器的使用会增加系统成本、复杂度和故障率。因此,无传感器矢量控制技术应运而生。
在无传感器矢量控制技术中,滑模观测器(SMO)算法是一种常用的速度观测方法。SMO算法通过估计电机的速度和位置信息,实现了对电机的闭环控制。然而,传统的SMO算法在转速变化较大时容易出现抖动现象,降低了电机控制的精度和稳定性。
为了解决传统SMO算法抖动的问题,基于PLL的SMO滑模观测器算法被提出。该算法利用相位锁定环路(PLL)技术对电机的转速进行精确估计,并将估计值输入到滑模观测器中。相比传统SMO算法,基于PLL的SMO滑模观测器算法具有更高的准确性和稳定性。
在实际应用中,基于PLL的SMO滑模观测器算法已经取得了显著的成果。通过实验验证,该算法在不同负载和速度工况下均能有效消除转速的抖动,提高了永磁同步电机的动态响应和控制精度。此外,该算法还具有较高的抗干扰能力和鲁棒性,能够适应复杂的工业环境。
总结来说,基于PLL的SMO滑模观测器算法是一种有效的无传感器矢量控制方法。通过利用PLL技术对电机转速进行精确估计,该算法能够消除转速的抖动,提高电机的控制性能和稳定性。未来,基于PLL的SMO滑模观测器算法有望在永磁同步电机控制领域进一步推广和应用。
相关的代码,程序地址如下:http://matup.cn/675387822737.html
















 615
615











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









