






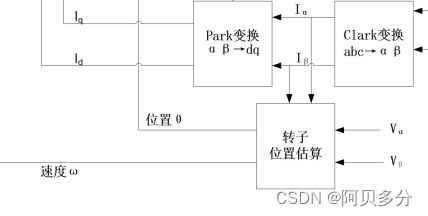
无感FOC控制技术是通过估算电机的位置来计算FOC所需的换相角度,实现FOC算法。通常电机的速度和位置是根据测量电机的电流和电压估算出的。
1、SMO(滑膜观测器)
滑膜观测器(SMO)是一种在不影响电机控制性能的前提下,将BLDC的数学模型简化,补偿数学模型后,引入了一个修正值或者叫校正因子(Z),通过反馈来不断的计算 Z ,使电机数学模型无限的接近真实电机,就算外部突发干扰也能通过修正值 Z 快速的修正状态。 如果真实系统是一条曲线,SMO观测器就是围绕这条曲线来回滑动的线条,简单且性能较好的算法。
优点:SMO的波形更平滑好看,适合中高速的电机
2、PLL(锁相环)
锁相环是一种通过相位误差控制的反馈系统,对基准信号与反馈信号进行频率比较,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,二者的相位必须相同且锁住其中电压控制振荡器和相位比较器相互连接,使得振荡器频率(相位)可以准确跟踪施加的频率或相位调制信号的频率。
优点:兼容多种电机,适合低转速
3、AO(ASMO)(自适应滑模观测器)
AO相对于SMO观测器参数调整更加容易。AO自适应滑模观测器对反电动势Ke参数的敏感度降低。即Ke参数设置值在很大范围内都能使算法稳定运行。
优点:兼容性比SMO好,对Ke反电动势敏感度降低,调整参数更容易


















 1648
1648

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











