






基于PLL的 SPMSM滑模观测器矢量控制(Matlab2018b及以上)
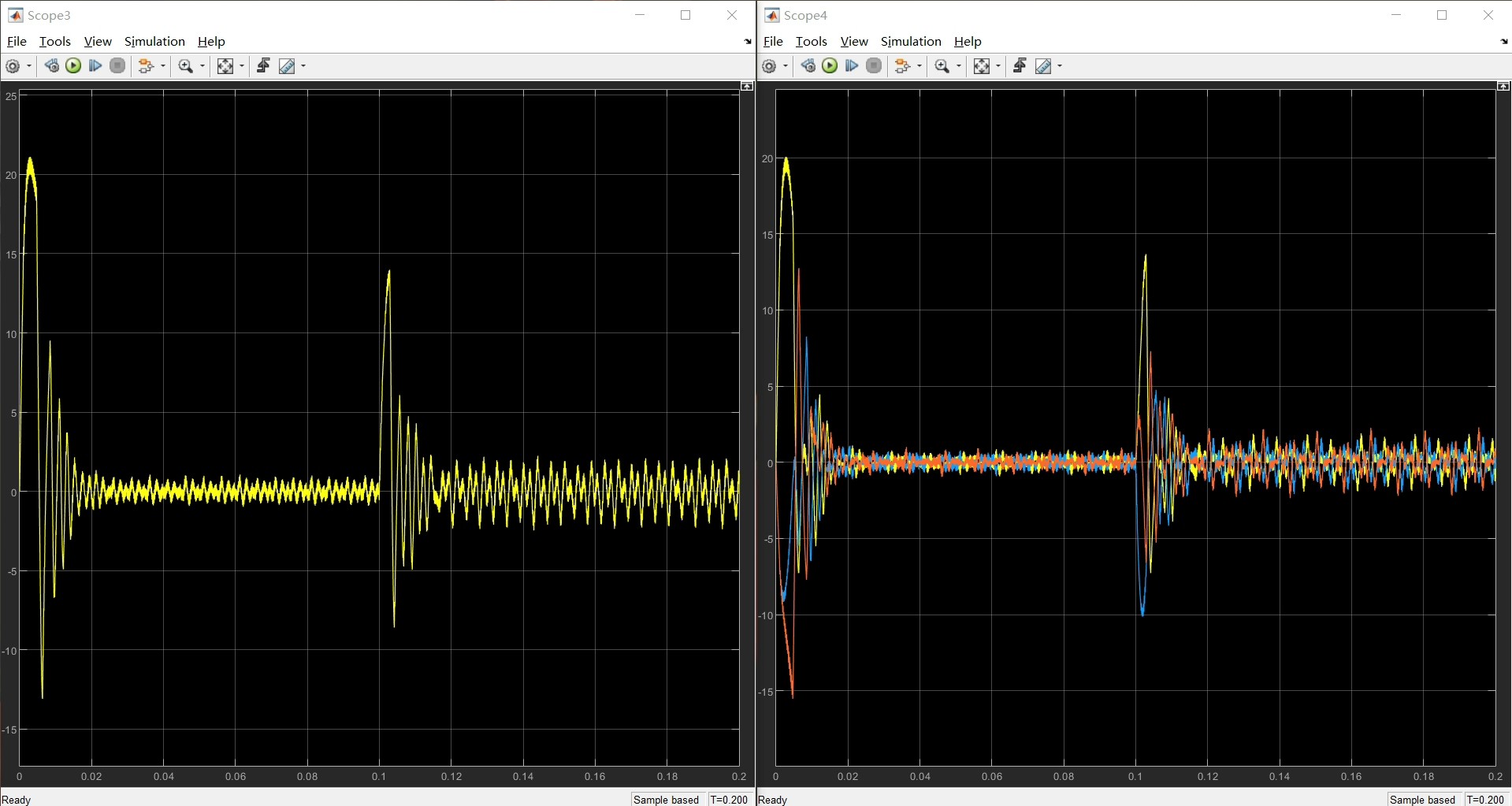
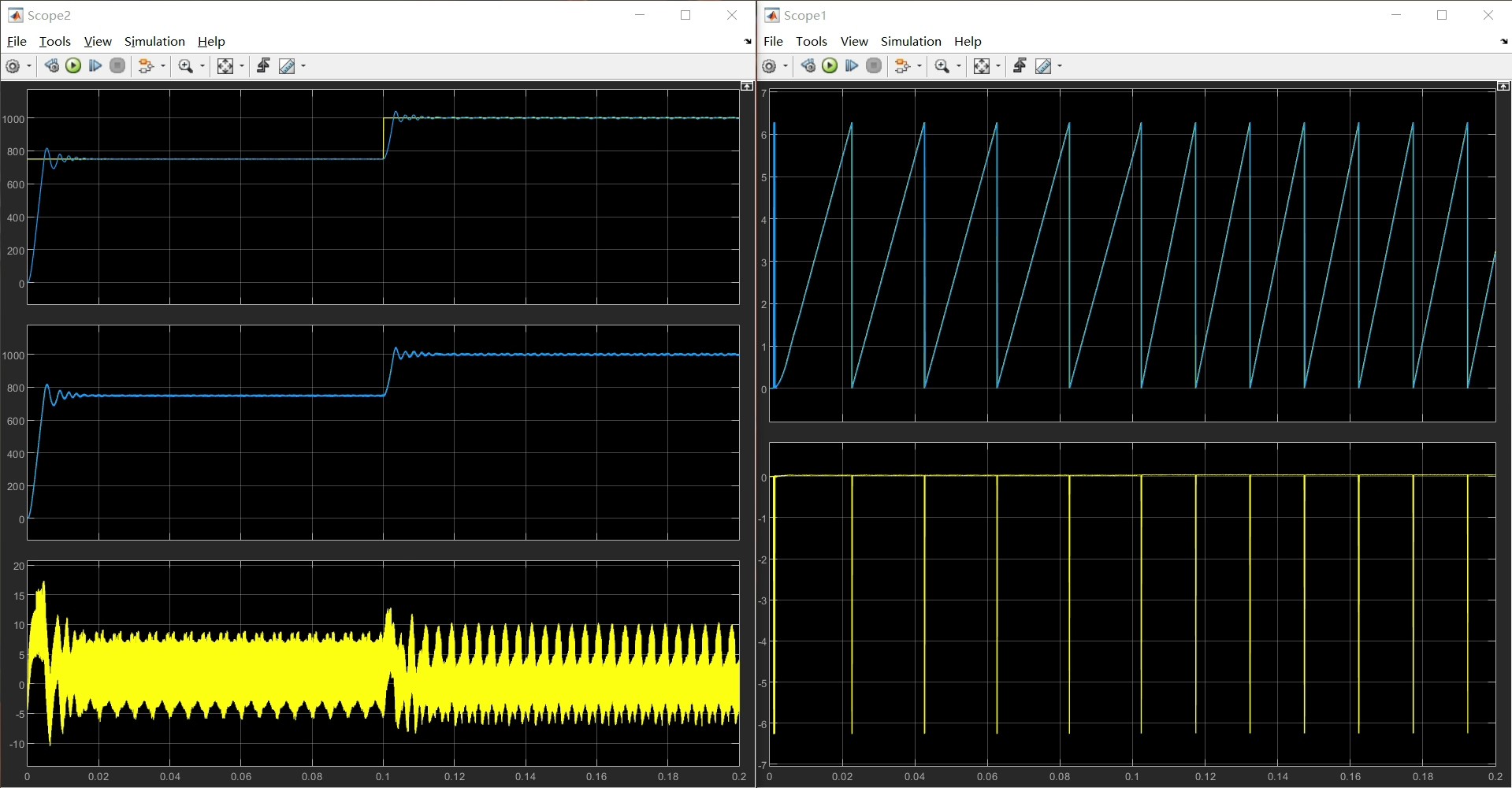
利用滑模观测器(SMO)估计电机反电动势,然后通过传统反正切函数、锁相环(PLL)实现电机转速及转子位置的观测。
其中,通过切换模块可实现两种估计方法的切换。
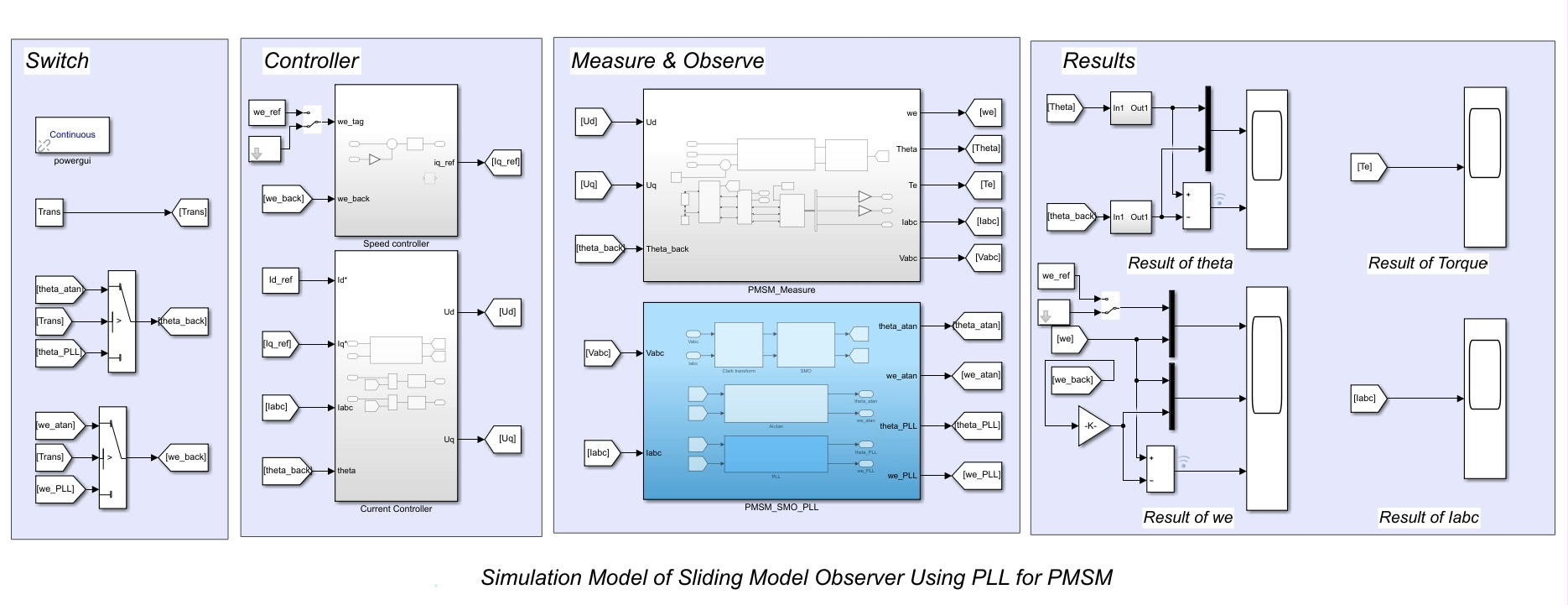
特殊说明:包含模型文件(模型内容包含控制器模块、测量与估计模块、切换模块及结果展示模块),另外包含相关参考资料。
整体逻辑清晰,界面整洁舒适,适合初学者入门学习。
ID:1280729265468090
电驱控制小屋
基于PLL的 SPMSM滑模观测器矢量控制(Matlab2018b及以上)
在电机控制领域,滑模观测器 (SMO) 是一种常用的估计电机反电动势的方法。而基于相位锁定环 (PLL) 的控制方法可以实现对电机转速和转子位置的准确观测。本文将介绍一种基于PLL的 SPMSM滑模观测器矢量控制方法,并通过切换模块实现两种估计方法的切换。
首先,我们需要了解滑模观测器(SMO)的工作原理。滑模观测器是一种通过测量电机电流和电机状态等信息来估计电机反电动势的方法。通过对电机的状态进行观测,可以实时地估计电机转速和转子位置,从而实现对电机的精确控制。在本文中,我们使用了传统的反正切函数来实现滑模观测器的电机反电动势的估计。
另外,我们还使用了相位锁定环 (PLL) 技术来实现对电机转速和转子位置的观测。PLL是一种基于时钟同步的控制方法,可以通过对电机的位移进行观测,进而实时地推算出电机的转速和转子位置。在本文中,我们将PLL与滑模观测器结合起来,实现了对电机的双重观测和控制。
为了实现两种估计方法的切换,我们设计了一个切换模块。通过控制切换模块的状态,可以在滑模观测器和PLL之间进行切换,从而选择不同的估计方法。这样一来,我们可以根据具体应用的需求,选择最合适的方法进行电机控制。
最后,为了方便初学者的学习和使用,我们提供了一个整洁舒适的界面。这个界面包含了控制器模块、测量与估计模块、切换模块以及结果展示模块。通过这个界面,初学者可以直观地了解控制流程,并进行相关参数的设置和实时观测。
综上所述,本文介绍了一种基于PLL的 SPMSM滑模观测器矢量控制方法。通过滑模观测器和PLL的结合,我们可以实现对电机的精确控制,并通过切换模块灵活选择不同的估计方法。这种方法不仅逻辑清晰,而且界面整洁舒适,非常适合初学者入门学习。希望本文能够帮助读者更好地理解和应用这种控制方法。
【相关代码,程序地址】:http://fansik.cn/729265468090.html


















 1277
1277

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









