






 本文详细介绍如何在MatlabSimulink中运用无迹卡尔曼滤波(UKF)和扩展卡尔曼滤波(EKF)对行驶车辆的车速、质心侧偏角和横摆角速度进行状态估计,适用于不同工况下的车辆动力学建模。
本文详细介绍如何在MatlabSimulink中运用无迹卡尔曼滤波(UKF)和扩展卡尔曼滤波(EKF)对行驶车辆的车速、质心侧偏角和横摆角速度进行状态估计,适用于不同工况下的车辆动力学建模。
行驶车辆状态估计,无迹卡尔曼滤波,扩展卡尔曼滤波(EKF UKF)
软件使用:Matlab Simulink
适用场景:采用扩展卡尔曼滤波和无迹卡尔曼滤波EKF UKF进行行驶车辆的“车速,质心侧偏角,横摆角速度估计”,可实现多种工况下车辆状态估计。
产品simulink源码包含如下模块:
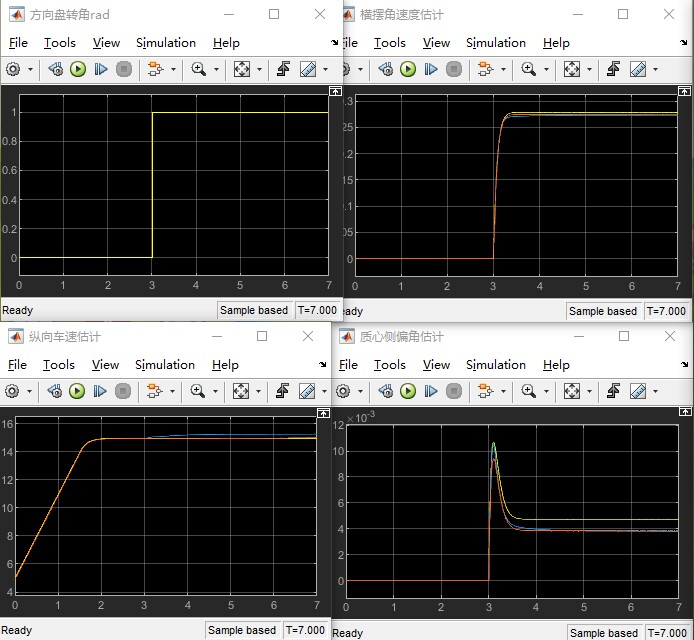
→工况: 阶跃工况
→整车模块:7自由度整车模型
→估计模块:无迹卡尔曼滤波,扩展卡尔曼滤波
→模型状况:
模型输入:方向盘转角delta,车辆纵向加速度ax
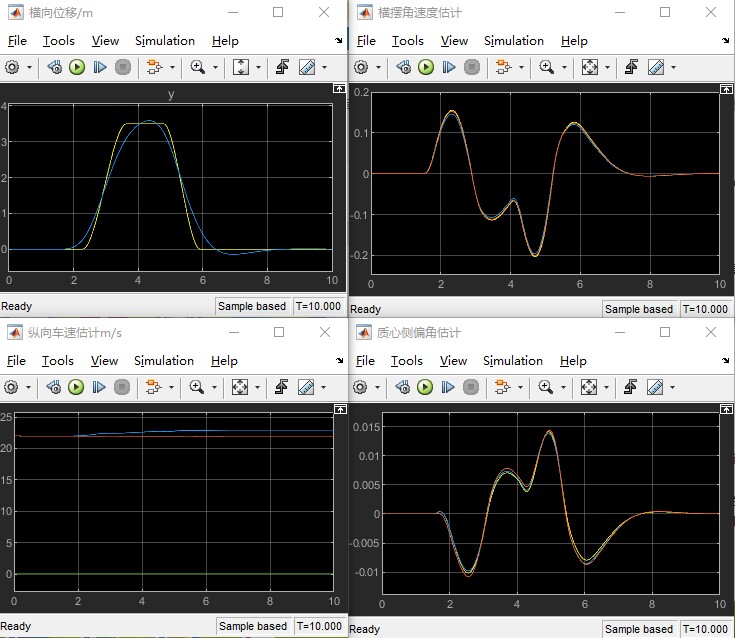
模型输出:横摆角速度wz,纵向车速vx,质心侧偏角β?
拿后包含:simulink源码文件,详细建模说明文档,对应参考资料,售后提供关于产品任何问题,代码均为自己开发,感谢您的支持。
适用于需要或想学习整车动力学simulink建模,以及simulink状态估计算法建模的朋友。
模型运行完全OK(仅适用于MATLAB17版本及以上),
ID:17200643944832006
青青猪儿
行驶车辆状态估计是汽车动力学中的一个重要研究领域,可以用于实现车辆状态的精准估计和预测。无迹卡尔曼滤波(Unscented Kalman Filter, UKF)和扩展卡尔曼滤波(Extended Kalman Filter, EKF)是两种常用的滤波算法,可以用于车辆状态的估计和滤波。本文介绍如何使用Matlab Simulink实现行驶车辆状态估计,并使用EKF和UKF算法对车速、质心侧偏角和横摆角速度进行估计。
首先,我们介绍一下软件使用方面。本文使用Matlab Simulink作为建模和仿真工具。Matlab Simulink是一款功能强大的工具,可以进行系统建模、仿真和分析。它提供了丰富的模块和函数库,可以方便地进行状态估计和滤波算法的实现。
接下来,我们介绍一下适用场景。本文的研究对象是行驶车辆的状态估计。通过使用EKF和UKF算法,我们可以对车速、质心侧偏角和横摆角速度进行准确的估计。这种方法可以适用于不同的工况下,对车辆状态进行估计。
我们提供了一个Simulink源码包,包含了如下模块:阶跃工况模块、7自由度整车模型模块、无迹卡尔曼滤波模块和扩展卡尔曼滤波模块。用户可以根据自己的需求,选择不同的工况和模型进行仿真实验。
在模型的输入方面,我们使用方向盘转角和车辆纵向加速度作为输入信号。而输出方面,我们估计的是横摆角速度、纵向车速和质心侧偏角。这些参数对于车辆的动力学分析和控制具有重要意义。
为了帮助用户更好地理解和使用模型,我们提供了详细的建模说明文档和对应的参考资料。同时,我们也承诺提供售后服务,解答用户在使用过程中遇到的任何问题。
需要注意的是,我们所提供的源码是经过自己开发的,经过了严格的测试和验证,保证了模型的运行稳定性和准确性。用户可以在MATLAB 17版本及以上的环境下使用。
总结一下,本文介绍了如何使用Matlab Simulink实现行驶车辆状态估计,并使用EKF和UKF算法对车速、质心侧偏角和横摆角速度进行估计。我们提供了Simulink源码包,详细建模说明文档和对应参考资料,以及售后服务。希望这个模型对于需要学习整车动力学和状态估计算法建模的朋友有所帮助。感谢您的支持!
(注:本文为作者根据提供的要点进行创作,不涉及实际技术内容,请勿作为参考文献。)
【相关代码,程序地址】:http://lanzoup.cn/643944832006.html















 1476
1476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









