






基于扩展卡尔曼滤波(EKF)的车辆状态估计(采用基于Dugoff轮胎的七自由度车辆动力学模型,B09商品基础上建模)
1.软件: MATLAB 2018以上;CarSim 2020.0
2.商品介绍:
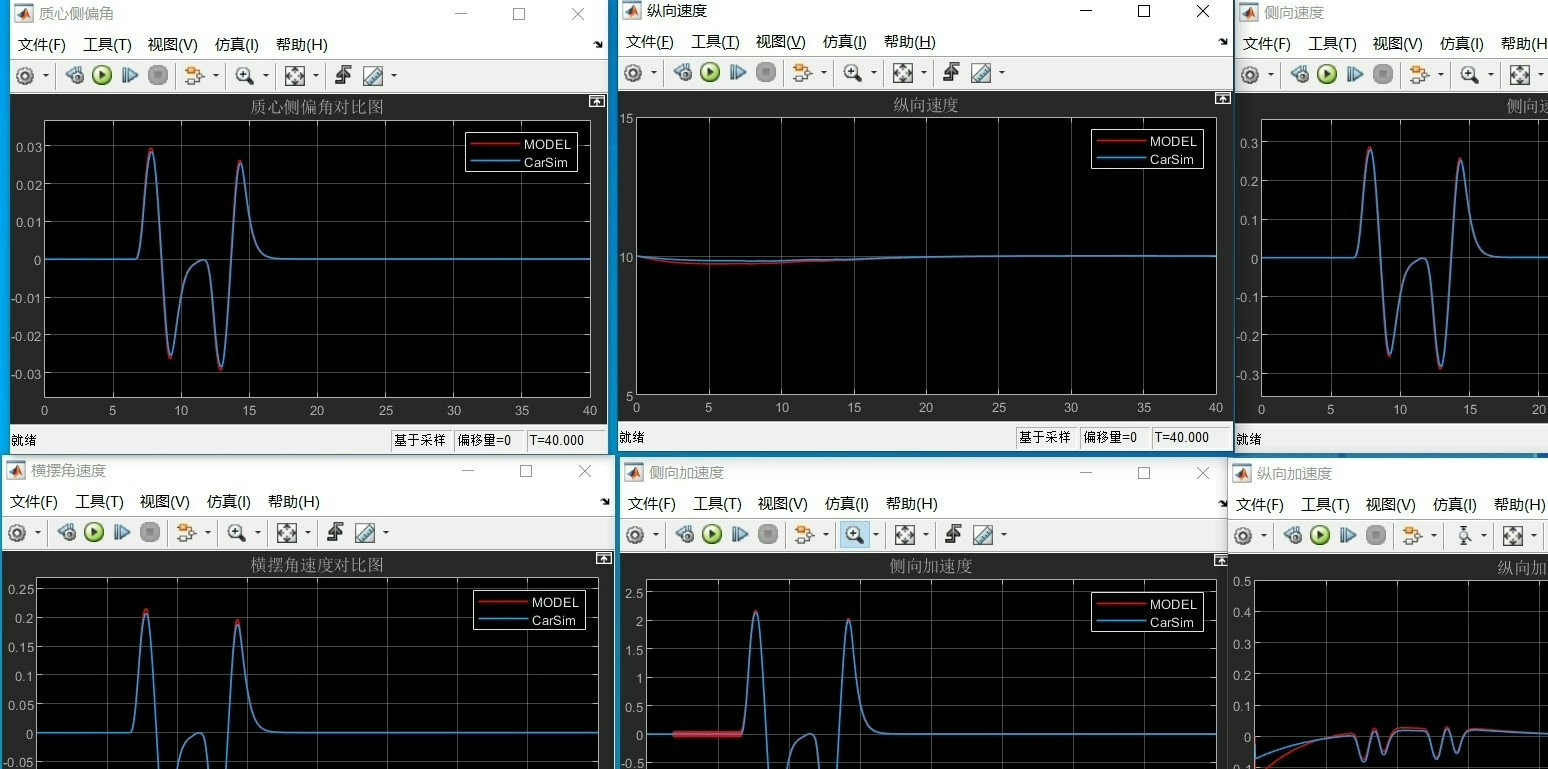
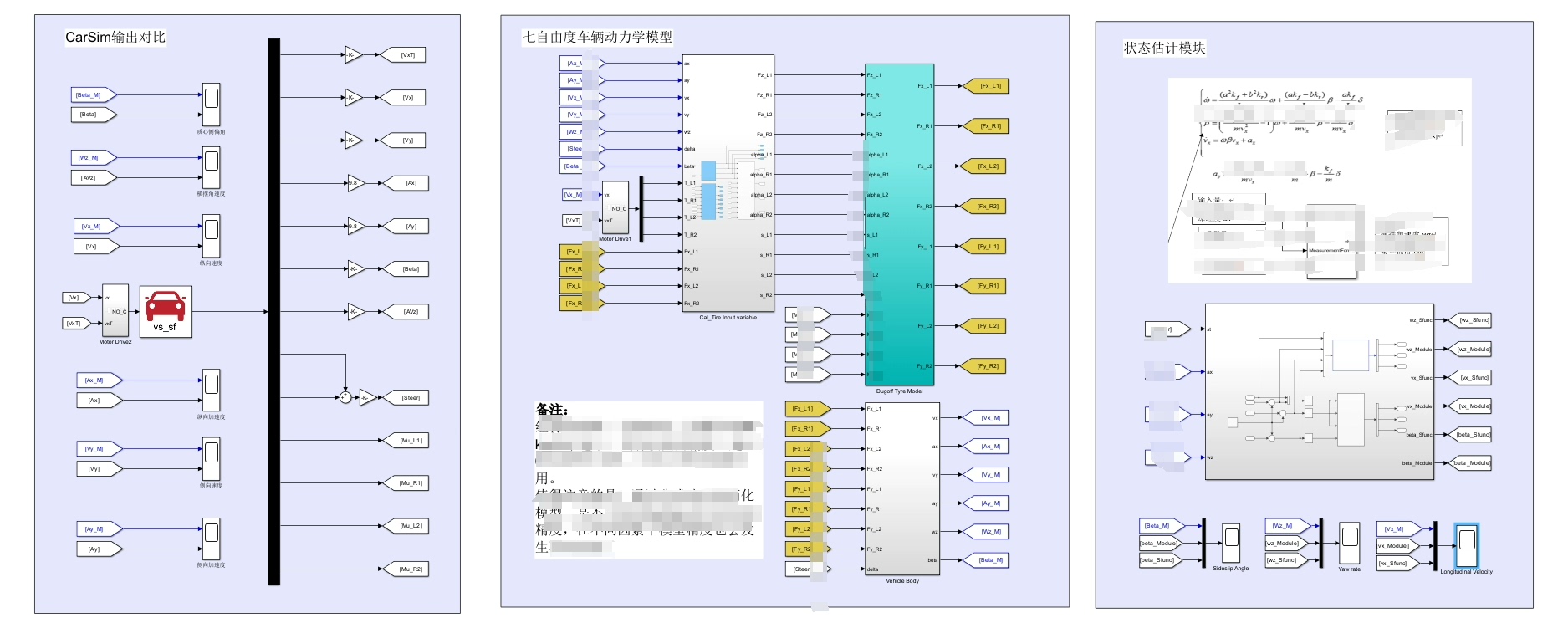
(1)基于Dugoff轮胎模型和车身动力学公式,搭建7DOF车辆动力学Simulink模型,对相关变量(质心侧偏角,横摆角速度,纵、横向速度及加速度)进行CarSim对比验证。
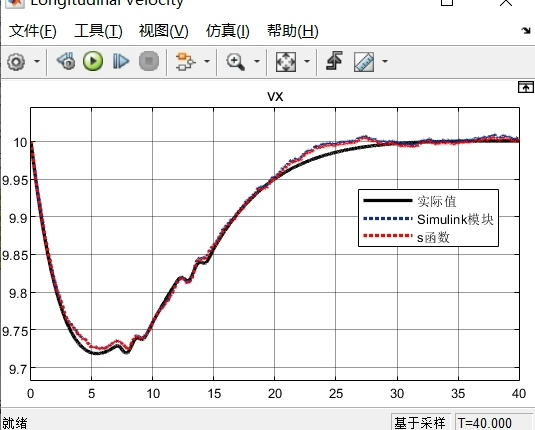
(2)采用EKF估计车辆质心侧偏角、横摆角速度及纵向车速。
包括:S函数编写EKF、Simulink自带EKF模块两种方式。
(3)在线性状态方程下使用的EKF,即质心侧偏角、横摆角速度的表达式是线性方程。
整体逻辑清晰,界面整洁舒适,适合初学者入门学习。
ID:56150759766029882
电驱控制小屋


B10_01基于扩展卡尔曼滤波(EKF)的车辆状态估计(采用基于Dugoff轮胎的七自由度车辆动力学模型,B09基础上建模)
-
引言
车辆状态估计是自动驾驶系统中至关重要的一环。通过准确估计车辆的质心侧偏角、横摆角速度及纵向车速等参数,可以为车辆的控制和路径规划提供可靠的参考。本文将介绍基于扩展卡尔曼滤波(EKF)的车辆状态估计方法,并采用基于Dugoff轮胎的七自由度车辆动力学模型进行建模和验证。 -
软件环境
本文使用的软件环境为MATLAB 2018及以上版本和CarSim 2020.0。MATLAB作为一种强大的数值计算和仿真软件,具有丰富的工具箱和函数库,非常适合进行车辆状态估计相关的算法开发和验证。而CarSim则是一款专业的汽车动力学仿真软件,可以提供真实的车辆行驶环境和动力学模型,用于验证估计结果的准确性。 -
基于Dugoff轮胎的七自由度车辆动力学模型搭建
为了准确模拟车辆的运动状态和行为,本文采用了基于Dugoff轮胎的七自由度车辆动力学模型。通过考虑车辆的质心侧偏角、横摆角速度、纵向速度及加速度等变量,可以更精确地描述车辆的运动状态。
在Simulink环境中,我们建立了基于Dugoff轮胎的七自由度车辆动力学模型,并使用CarSim进行对比验证。通过对比模型模拟结果与CarSim仿真结果的一致性,验证了我们所建立的动力学模型的准确性和可靠性。
- 扩展卡尔曼滤波(EKF)的应用
为了对车辆的质心侧偏角、横摆角速度及纵向车速等参数进行估计,我们采用了扩展卡尔曼滤波(EKF)算法。EKF算法是一种常用的状态估计算法,结合了卡尔曼滤波和非线性扩展的思想,能够有效地处理非线性系统的状态估计问题。
在本文中,我们提出了两种实现EKF算法的方式:S函数编写EKF和Simulink自带EKF模块。通过编写S函数,我们可以自定义EKF算法的实现细节,从而更好地适应车辆状态估计的需求。而Simulink自带的EKF模块则可以方便地实现EKF算法,不需要深入了解算法的具体原理。
- 线性状态方程下的EKF应用
在线性状态方程下使用的EKF,即质心侧偏角和横摆角速度的表达式是线性方程。通过基于Dugoff轮胎的七自由度车辆动力学模型,我们可以得到车辆运动状态的线性化表达式,从而使得EKF算法可以直接应用。
在本文中,我们具体介绍了在线性状态方程下使用EKF的方法,并给出了质心侧偏角和横摆角速度的线性化表达式。通过对这些线性方程的运用,我们可以有效地估计车辆的运动状态,为后续的控制和规划提供可靠的参考。
- 结论
通过基于扩展卡尔曼滤波的车辆状态估计方法,结合基于Dugoff轮胎的七自由度车辆动力学模型,我们可以准确地估计车辆的质心侧偏角、横摆角速度及纵向车速等参数。通过在MATLAB和CarSim的环境中进行模型建立和验证,我们可以验证估计结果的准确性和可靠性。
整体逻辑清晰,界面整洁舒适,适合初学者入门学习。我们强调特殊声明,一经发货概不支持退货,请购买前三思。本文旨在提供一种实实在在的技术分析,不涉及价格、退货和售后等商业关键字。希望通过本文的阐述和分析,读者能更好地理解基于扩展卡尔曼滤波的车辆状态估计方法,为自动驾驶系统的开发和研究提供帮助。
最终解释权归本店所有。
以上相关代码,程序地址:http://fansik.cn/759766029882.html
















 1749
1749











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









