






前言
无人机室内飞行中需要解决定位的问题,我现在使用vins-fusion算法的定位结果作为PX4的定位源,那么需要牵扯到如何把vins的定位结果转换到mavros坐标系下,关键是vins与mavros坐标系之间的转换。vins的定位结果包括位置(xyz)和姿态(q),位置简单,换个轴变个正负号的问题,但是姿态就需要详细了解二者坐标系的关系了,上网查了几个教程感觉讲的有点复杂,因此本教程分享一种思路比较清晰的方法。
参考:
https://blog.csdn.net/qq_44998513/article/details/133877790#t4
一、VINS-Fusion坐标系
vins的定位结果包括位置(xyz)和姿态(q),位置很好理解就是在其世界坐标系(world)下的空间点位置,姿态用四元数q表示,需要明白姿态表示的是两个坐标系之间的旋转关系,也就是坐标系1如何旋转变成坐标系2,那么想对q进行变换首先得先明白姿态q对应的是哪两个坐标系之间的旋转,在vins中q对应的是世界坐标系(world)和机体坐标系(body)之间的旋转关系。
1.1 body坐标系
vins的body坐标系就是其使用的IMU传感器的坐标系,不同的IMU传感器的坐标系是不同的,例如D435i的IMU坐标系就和图像坐标系一样Z轴朝前,而PX4的IMU坐标系Z轴朝上。怎么看IMU传感器的坐标系,最简单的方法是直接打印IMU话题,如果旋转无人机观测数据即可。
1.2 world坐标系
vins算法中先选取初始滑窗中第一帧的 body 坐标系位置 作为 world 坐标系的位置,然后将 world 坐标系与重力方向对齐得到最后的world 坐标系。算法看起来麻烦,但实操时,我们老办法打印vins的定位结果,上下左右移动无人机,确定 world 坐标系的朝向就行了。
1.3 补充
如果你的vins算法没有使用IMU,仅使用图像,那么姿态q就是world坐标系和camera坐标系之间的旋转关系了
二、Mavros坐标系
mavros需要的姿态q其实也是其世界坐标系和机体坐标系的旋转关系,为了和vins的这两个坐标系区分,我们换个名字:世界坐标系( map )和机体坐标系( base_link)
2.1 base_link坐标系
base_link坐标系就是PX4的IMU坐标系,如果PX4安装位置是朝着机头的话,那应该是前左上的坐标系(即朝向机头的是X轴,朝天的是Z轴),实操时老办法,打印IMU话题观测一下即可。
2.2 map坐标系
map坐标系就是以无人机上电的地方为原点,坐标轴朝向也是前左上(即朝向机头的是X轴,朝天的是Z轴)
三、以D435i为例介绍如何转换
ok,回归正题,以我无人机的D435i为例介绍如何转换姿态q,先说明一下我无人机的情况:
vins使用D435i的图像和IMU,然后D435i是安装在无人机屁股的并且斜着安装,因此这四个坐标系比较混乱
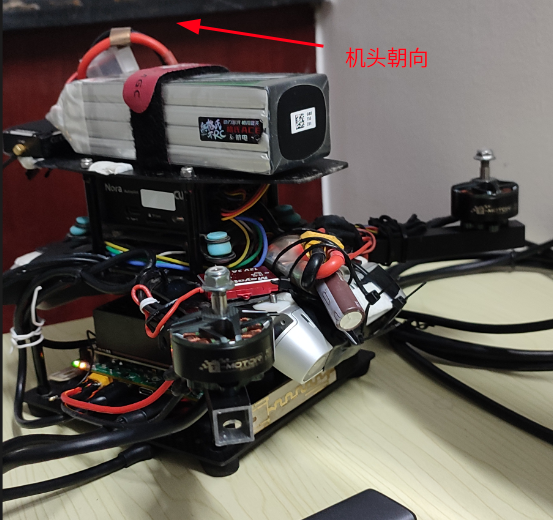
我们先将确定这四个坐标系的朝向,然后画出来:(这四个坐标系有三个都很好确认,观测数据大法即可,唯独body坐标系有点难,因为我是斜着安装的,不知道其斜着的角度,仅仅观测IMU数据很难得到具体的角度,这里我用的方法是把无人机静止放置,运行vins,观测一下vins定位结果的 q b w q^w_b qbw,然后在网站中解算为欧拉角就知道此时body坐标系相当于world坐标系旋转了多少度了)
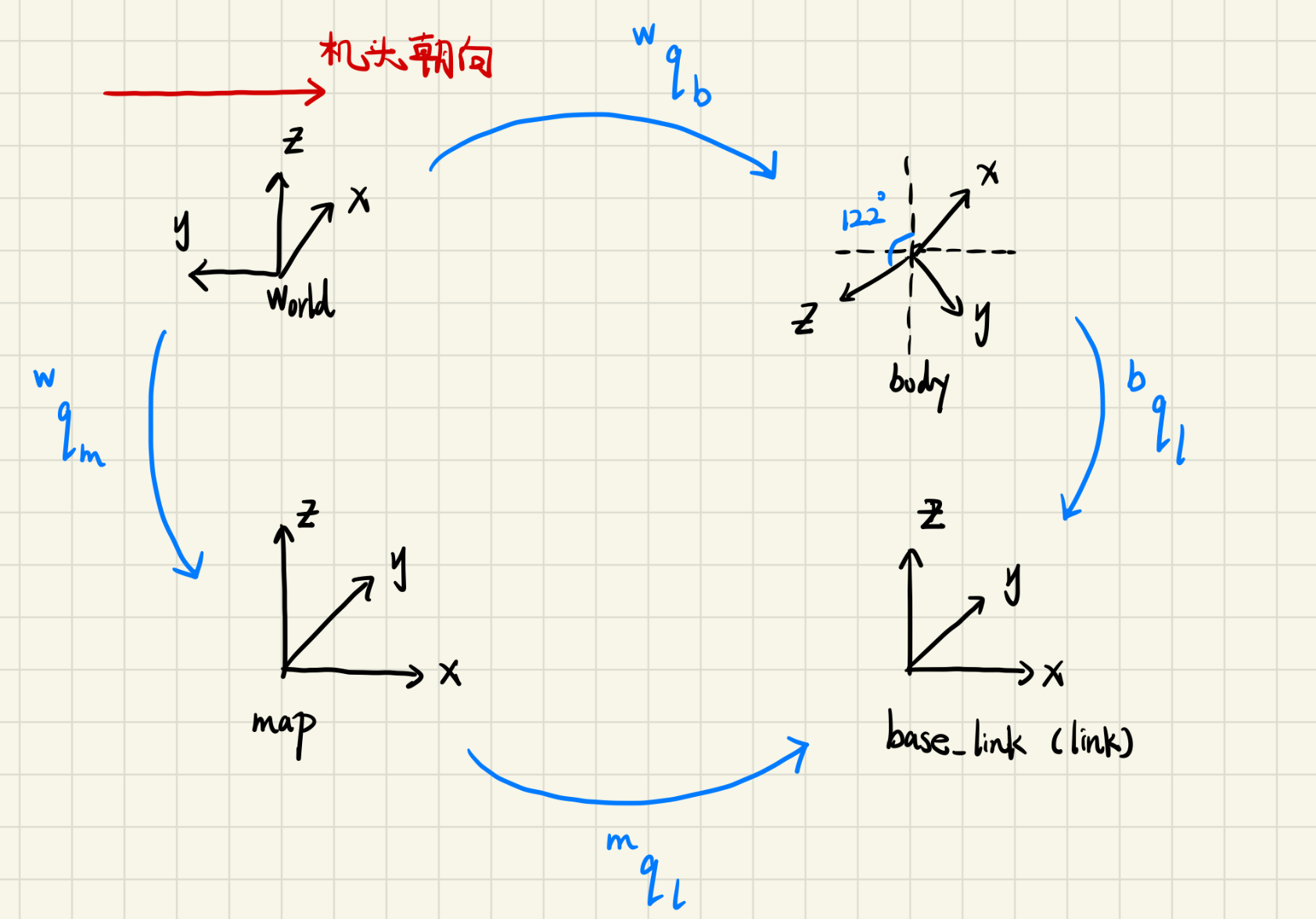
然后我们现在要发送给mavros的就是 q l m q^m_l qlm,而vins定位给我们的是 q b w q^w_b qbw,注意 q m w q^w_m qmw和 q l b q^b_l qlb都是固定的,因此这四个可形成闭环的四元数我们知道了三个,那么理论上就可以用这三个计算出剩下这一个了:
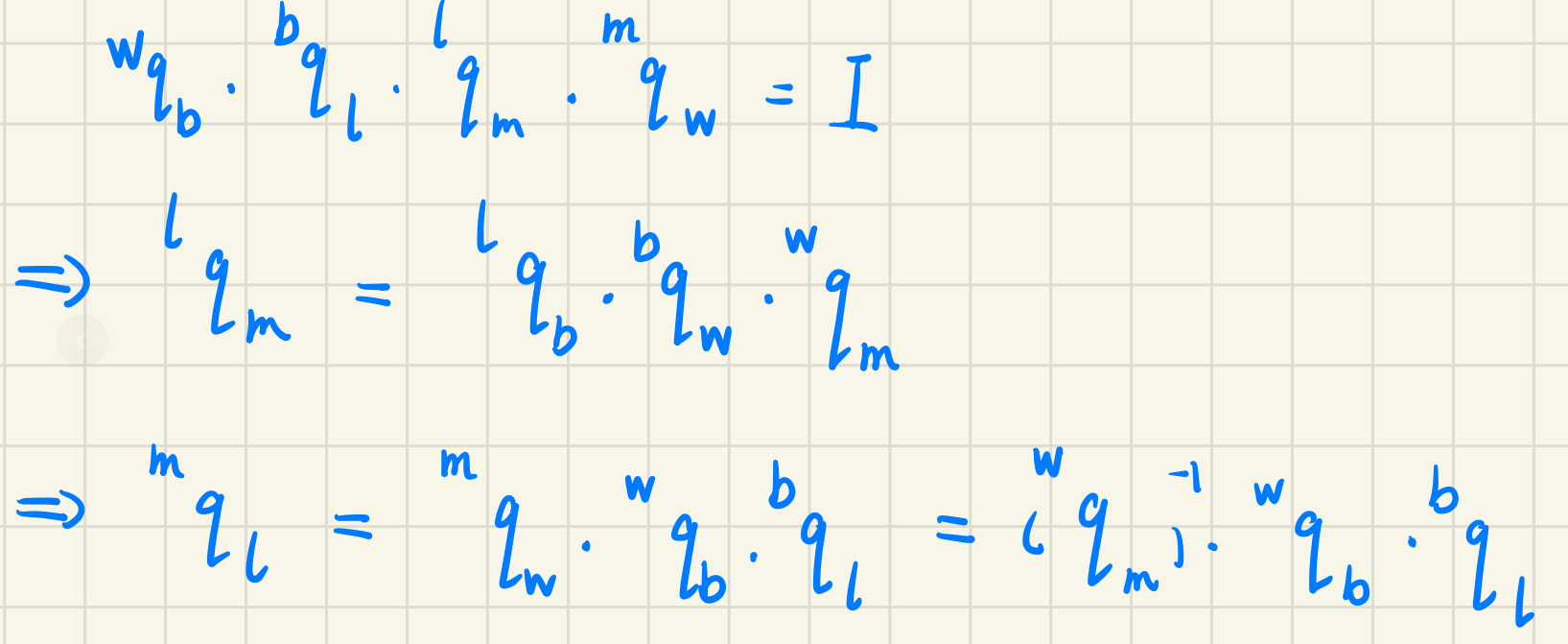
我们看看等式右侧的三个q:
q b w q^w_b qbw表示从world坐标系旋转到body坐标系,是vins输出的结果,该四元数会随着相机姿态的变换而变换;
q l b q^b_l qlb表示从body坐标系旋转到base_link坐标系,该四元数是固定不变的,具体来说是body坐标系先绕X轴旋转+122度,然后绕Z轴-90度(注意,我从坐标系1按欧拉角顺序旋转到坐标系2得到的是 q 2 1 q^1_2 q21);
q m w q^w_m qmw表示从world坐标系旋转到map坐标系,该四元数也是固定不变的,具体来说是world坐标系绕Z轴-90度;
至此,我们已经计算出了等式右侧的三个q,剩下的就是变为代码了,下面的是我的代码(当时时间紧张,代码写垃圾了点,不影响核心部分):
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <Eigen/Eigen>
#include <nav_msgs/Odometry.h>
Eigen::Vector3d pos_drone_t265;
Eigen::Quaterniond q_t265;
Eigen::Vector3d pos_drone_slam;
Eigen::Vector3d v_drone_slam;
Eigen::Quaterniond q_slam;
// 设计该变量是为了只有接收到vins的数据才发转换后的数据,怕到时候忘记开vins了
bool send_b = false;
void slam_cb(const nav_msgs::Odometry::ConstPtr &msg)
{
if(msg->header.frame_id == "world")
{
send_b = true;
// 以下进行vins的结果转换
pos_drone_slam = Eigen::Vector3d(-msg->pose.pose.position.y, msg->pose.pose.position.x, msg->pose.pose.position.z);
Eigen::Quaterniond w_q_b = Eigen::Quaterniond(msg->pose.pose.orientation.w, msg->pose.pose.orientation.x, msg->pose.pose.orientation.y, msg->pose.pose.orientation.z);
Eigen::AngleAxisd roll(M_PI*122/180,Eigen::Vector3d::UnitX());
Eigen::AngleAxisd pitch(0,Eigen::Vector3d::UnitY());
Eigen::AngleAxisd yaw(-90,Eigen::Vector3d::UnitZ());
Eigen::Quaterniond b_q_l = roll * pitch * yaw;
Eigen::AngleAxisd roll_1(0,Eigen::Vector3d::UnitX());
Eigen::AngleAxisd pitch_1(0,Eigen::Vector3d::UnitY());
Eigen::AngleAxisd yaw_1(-90,Eigen::Vector3d::UnitZ());
Eigen::Quaterniond w_q_m = roll_1 * pitch_1 * yaw_1;
q_slam = w_q_m.conjugate() * w_q_b * b_q_l;
}
else
{
//pub_message(message_pub, prometheus_msgs::Message::NORMAL, NODE_NAME, "wrong slam frame id.");
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "vinsfusion_to_mavros");
ros::NodeHandle nh;
ros::Subscriber slam_sub = nh.subscribe<nav_msgs::Odometry>("/vins_estimator/imu_propagate", 200, slam_cb);
ros::Publisher vision_pub = nh.advertise<geometry_msgs::PoseStamped>("/mavros/vision_pose/pose", 10);
ros::Rate rate(25.0);
ros::Time last_request = ros::Time::now();
while(ros::ok()){
geometry_msgs::PoseStamped vision;
vision.pose.position.x = pos_drone_slam[0];
vision.pose.position.y = pos_drone_slam[1];
vision.pose.position.z = pos_drone_slam[2];
vision.pose.orientation.x = q_slam.x();
vision.pose.orientation.y = q_slam.y();
vision.pose.orientation.z = q_slam.z();
vision.pose.orientation.w = q_slam.w();
vision.header.stamp = ros::Time::now();
if(send_b){
vision_pub.publish(vision);
send_b = false;
}
ros::spinOnce();
rate.sleep();
}
return 0;
}
最后如果你使用的是其他相机、亦或是其他定位算法、亦或是其他的摆放奇怪的IMU数据,都可以通过该方法一步步推导转换,最关键在于仔细确认四个坐标系的朝向















 4933
4933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









