







与实际输入/输出信号相关的输入/输出映象区:
I:数字量输入(DI)
Q:数字量输出(DO)
AI:模拟量输入
AQ:模拟量输出
内部数据存储区:
V:变量存储区,可以按位、字节、字或双字来存取V 区数据
M:位存储区,可以按位、字节、字或双字来存取M区数据
T:定时器存储区,用于时间累计
C:计数器存储区,用于累计其输入端脉冲电平由低到高的次数
HC:高速计数器,独立于 CPU 的扫描周期对高速事件进行计数,高速计数器的当前值是只读值,仅可作为双字(32 位)来寻址
AC:累加器,可以像存储器一样使用的读/写器件,可以按字节、字或双字访问累加器中的数据
SM:特殊存储器,提供了在 CPU 和用户程序之间传递信息的一种方法。 可以使用这些位来选择和控制 CPU 的某些特殊功能, 可以按位、字节、字或双字访问 SM 位
L:局部存储区,用于向子例程传递形式参数
S:顺序控制继电器,用于将机器或步骤组织到等效的程序段中,实现控制程序的逻辑分段。 可以按位、字节、字或双字访问 S 存储器| 定时器类型 | 分辨率 | 最大定时值 | 定时器值 |
| TONR (可保持) | 1 ms | 32.767s (0.546min.) | T0, T64 |
| 10 ms | 327.67s (5.46min.) | T1-T4, T65-T68 | |
| 100 ms | 3276.7s (54.6min.) | T5-T31, T69-T95 | |
| TON,TOF (不保持) | 1 ms | 32.767s (0.546min.) | T32, T96 |
| 10 ms | 327.67s (5.46min.) | T33-T36, T97-T100 | |
| 100 ms | 3276.7s (54.6min.) | T37-T63, T101-T255 |
B 8 W 16 D32 // QW0=16#FF
200smart:
电源:
【3A】PM207 S7-200 SMART 配套电源,24 V DC/3 A 6ES7 288-0CD10-0AA0 【60】
【5A】PM207 S7-200 SMART 配套电源,24 V DC/5 A 6ES7 288-0ED10-0AA0【60】
【10A】PM207 S7-200 SMART 配套电源,24 V DC/10A 6ES7 288-0KD10-0AA0【145】
CIM网关 6ED1055-5MC08-0BA2 【670】
CSM1277 以太网交换机,4 端口 6GK7 277-1AA00-0AA0
SCALANCE XB005 以太网交换机,5 端口 6GK5 005-0BA00-1AB2
I/O 扩展电缆,长度 1 米 6ES7 288-6EC01-0AA0
USB/PPI 电缆 S7-200 SMART 经济型 CPU 编程电缆,USB 接口 6ES7 901-3DB30-0XA0S7-200 - 产品模板页
PLC:
6ES7288-1ST60-0AA2 【DI36点,DO24点】
买这个: 6ES7 288-1ST60-0AA1
0AA2 是新款 ,固件V3.0
0AA1 较新 ,固件V2.8 新980,旧600
0AA0 是老款,软件闪退,要安装旧版本,固件最高V2.5
RS485 3正8负5地【sDA和rDA短接】
1【屏蔽】2【24v地】3【A+】4【RTSttl】5【5v地】
6【+5v】7【+24v】8【B-】9 十位协议输入
模块:SB CM01 6ES7 288-5CM01-0AA0【RS485】
触摸屏:SMART 1000 IE V4 6AV6 648-0DE11-3AX0
内存卡:4g,8g,16g【普通商用tf卡】


C减配,S标准型
SR 标准,继电器型,不能输出脉冲
ST 标准,晶体管型,支持脉冲
信号板:

SB CM01 通信信号板,RS485/RS232 6ES7 288-5CM01-0AA0
SB DT04 数字量扩展信号板,2 x 24 V DC 输入/2 x 24 V DC 输出 6ES7 288-5DT04-0AA0
SB AE01 模拟量扩展信号板,1×12 位模拟量输入 6ES7 288-5AE01-0AA0
SB AQ01 模拟量扩展信号板,1 x 12 位模拟量输出 6ES7 288-5AQ01-0AA0
SB BA01 电池信号板,支持 CR1025 纽扣电池(电池单独购买) 6ES7 288-5BA01-0AA0触摸屏:
SMART 700 IE V4 6AV6 648-0DC11-3AX0 【450】
新一代 SMART LINE 触摸屏,7 寸,16M 色,集成以太网口和串口,USB 接口,RTC,归档记录功能
SMART 1000 IE V4 6AV6 648-0DE11-3AX0 【830】
新一代 SMART LINE 触摸屏,10 寸,16M 色,集成以太网口和串口,USB 接口,RTC,归档记录功能 


HMI 面板 订货号
SMART 700 IE V4 新一代 SMART LINE 触摸屏,7 寸,16M 色,集成以太网口和串口,USB 接口,RTC,归档记录功能 6AV6 648-0DC11-3AX0
SMART 1000 IE V4 新一代 SMART LINE 触摸屏,10 寸,16M 色,集成以太网口和串口,USB 接口,RTC,归档记录功能 6AV6 648-0DE11-3AX0
常州 江苏省常州市关河东路38号 九洲寰宇大厦989室 电话:(0519) 8989 5801
数组:0最高字节 1低字节
CPU 做 PROFINET 控制器时
1 号 PROFINET 设备过程映像寄存器地址 I128.0 至 I255.7 Q128.0 至 Q255.7
2 号 PROFINET 设备过程映像寄存器地址 I256.0 至 I383.7 Q256.0 至 Q383.7
3 号 PROFINET 设备过程映像寄存器地址 I384.0 至 I511.7 Q384.0 至 Q511.7
4 号 PROFINET 设备过程映像寄存器地址 I512.0 至 I639.7 Q512.0 至 Q639.7
5 号 PROFINET 设备过程映像寄存器地址 I640.0 至 I767.7 Q640.0 至 Q767.7
6 号 PROFINET 设备过程映像寄存器地址 I768.0 至 I895.7 Q768.0 至 Q895.7
7 号 PROFINET 设备过程映像寄存器地址 I896.0 至 I1023.7 Q896.0 至 Q1023.7
8 号 PROFINET 设备过程映像寄存器地址 I1024.0 至 I1151.7 Q1024.0 至 Q1151.7
CPU 做 PROFINET 智能设备时 I1152.0 至 I1279.7 Q1152.0 至 Q1279.7
SIMATIC S7-200 SMART常见问题大全-PLC-西门子下载中心-西门子官网技术文档资料下载中心
运动控制:
只有ST60 v2.8版本可以用4个轴
只用xy时,可以把4轴分2组
当用xyz时,只能分1组。

GRP0_2/3D_MOVELINEAR 轴组0插补运动 0~127
GRP0_RESET 复位轴组0
GRP0_STOP 停止轴组0
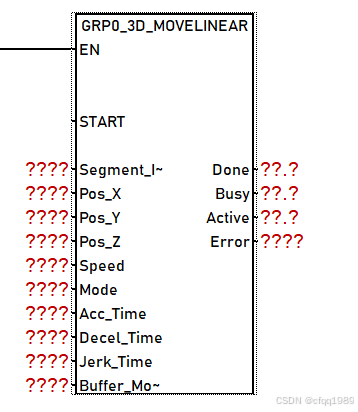
Segment_id 线段id 0~127【不起作用,可以当五角星的线段号注释用】
Pos_X 目标位置
Speed 目标速度
Mode 模式,0绝对运动,1相对运动
Acc 加速时间ms
Decel 减速时间ms
Jerk 急停时间ms
Buff 0打断前一个运动,1等待前一个运动执行完成
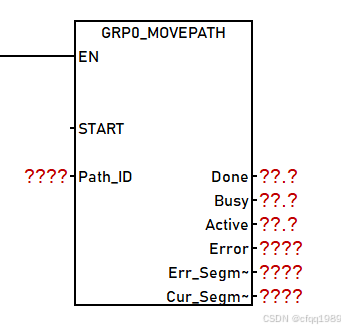
线段id 0~127 路径下》线段会按顺序运动,线段总和是128条,0~127
s1200:
固件下载等:
https://sieportal.siemens.com/zh-cn/search?scope=knowledgebase&Type=siePortal&SearchTerm=&SortingOption=CreationDateDesc&EntryTypes=Download&Page=0&PageSize=20&ProductNodePath=%2F13613%2F13614%2F13615%2F13616%2F13639%2F13683%2F1200G2:1214C DC/DC/DC 6ES7 214-1AH50-0XB0 【DI14点,DO10点】【2100¥】
Q0.0~0.3是100k,Q0.4~1.1是20k
1200G2:1212C DC/DC/DC 6ES7 212-1AG50-0XB0 【DI 8点,DO 6点】
信号板:【200KHz】DI4/DO4 6ES7 223-7AF50-0XB0
【100KHz】 输出8:6ES7 222-5BF50-0XB0【450¥】
输入8: 6ES7 221-3BF50-0XB0
继电器:输出16: 6ES7 222-5HH50-0XB0
CPU 订货号-SIMATIC S7-1200基本介绍-PLC-西门子下载中心常见问题大全
电源:
PM1207 120W 6EP3 333-4SC00-3AX0【25年最新】
PM1207 2.5A 170 6EP1 332-1SH71
PLC:
PLC手册: SIOS
新手下载:软件PLC版本选v4.4下载程序。
S7-1200 CPU 固件版本 V4.6
1214c 6ES7214-1AG40-0XB0 新1400 旧 700
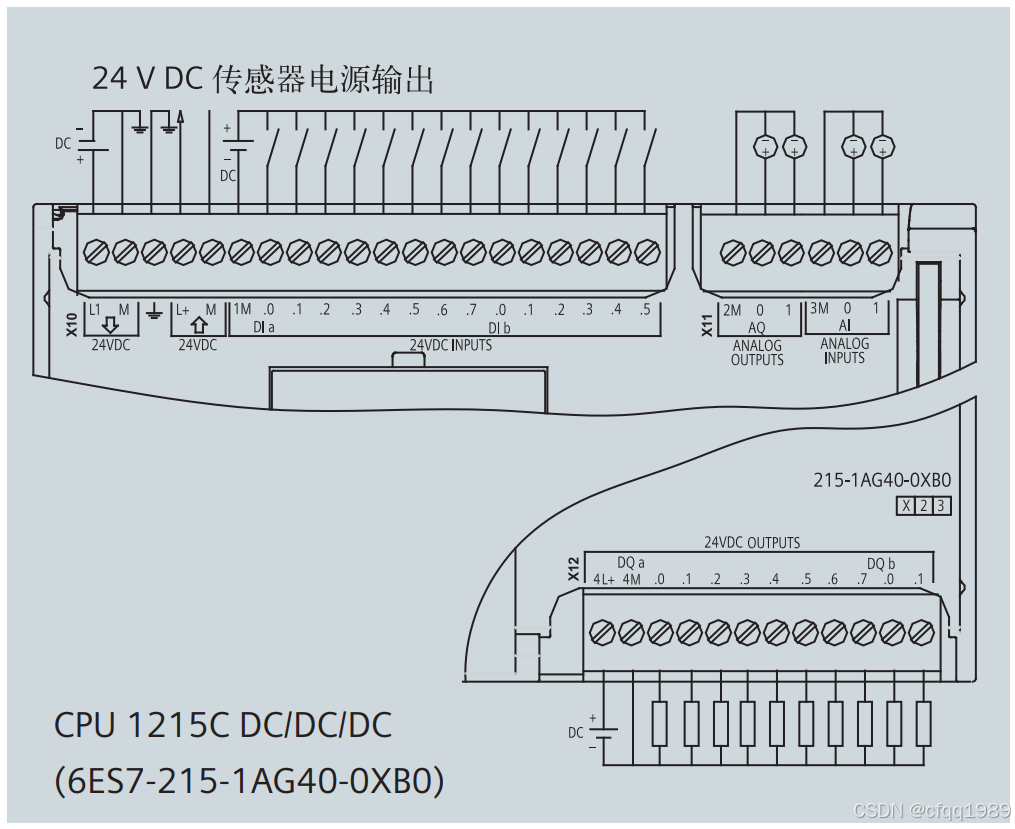
1215c 6ES7215-1AG40-0XB0 新1800,2035 旧1100
1217c 6ES7217-1AG40-0XB0 新1800,3556 旧1300
1511t 6ES7511-1TL03 -0AB0 新3500 旧1800
最多 4 路开环定位控制【脉冲】,最多 8 路闭环定位控制



LAD:梯形图
FBD:逻辑门电路
STL:汇编语言
SCL:高级语言 【用这个】这个跟codesys的ST语言一样。
Graph:图形
SIMATIC S7-1200 - SIMATIC 控制器 - CN


AG DC/DC/DC 电源 dc24v 输入dc24 输出dc24
BG AC/DC/继电器 电源ac220v 输入dc24 输出AC220v
HG DC/DC/继电器 电源 dc24v 输入dc24 输出AC220v
- 1 个信号板 (SB)
- 8 个信号模块 (SM)
- 3 个通信模块 (CM) -CM 1241 通信模块【RS485】CB 1241 通信板- CM 1243-5 主站DP【PROFIBUS】
-CM 1243-2
-SM 1278 IO-Link 主站
-CP 1243-1 通信
以下为 V4.6 版本的新增功能:
• 增大了 S7-1200 CPU 的工作存储器 (页 29):
– CPU 1211C 现在为 75 KB。
– CPU 1212C 现在为 100 KB。
– CPU 1214C 现在为 150 KB。
– CPU 1215C 现在为 200 KB。
– CPU 1217C 现在为 250 KB。
– CPU 1212FC 现在为 150 KB。
– CPU 1214FC 现在为 200 KB。
– CPU 1215FC 现在为 250 KB。
OB是Task程序【多线程】
FB是功能块
FC是函数【不具备变量存储】
DB是变量存储
信号板:
【CB1241】6ES7241-1CH30-1XB0
3【A+】 4【 】
8【B-】
5【GND】
SB 1221 200kHz 4 x 5 VDC 输入(源)6ES7221-3AD30-0XB0
SB 1222 200kHz 4 x 5 VDC 输出(漏/源)6ES7222-1AD30-0XB0
SB 1223,200kHz 2 x 5 VDC 输入(源)/2 x 5 VDC 输出 (漏/源)6ES7223-3AD30-0XB0
SB 1231 1 路模拟量输入6ES7231-4HA30-0XB0
SB 1232 1 路模拟量输出6ES7232-4HA30-0XB0
SB 1231 1 路模拟量输入 热电偶6ES7231-5QA30-0XB0
SB 1231 1 路模拟量输入 热电组6ES7231-5PA30-0XB0

左扩展:
【SM1278 IO LINK 主站模块】SM 1278 V2.1 订货号:6ES7278-4BD32-0XB0
【SM 1281 振动检测】6AT8007-1AA10-0AA0
CM 1243-5 V1.3.8 订货号:6GK7243-5DX30-0XE0
CM 1242-5 V1.0.6 订货号:6GK7242-5DX30-0XE0
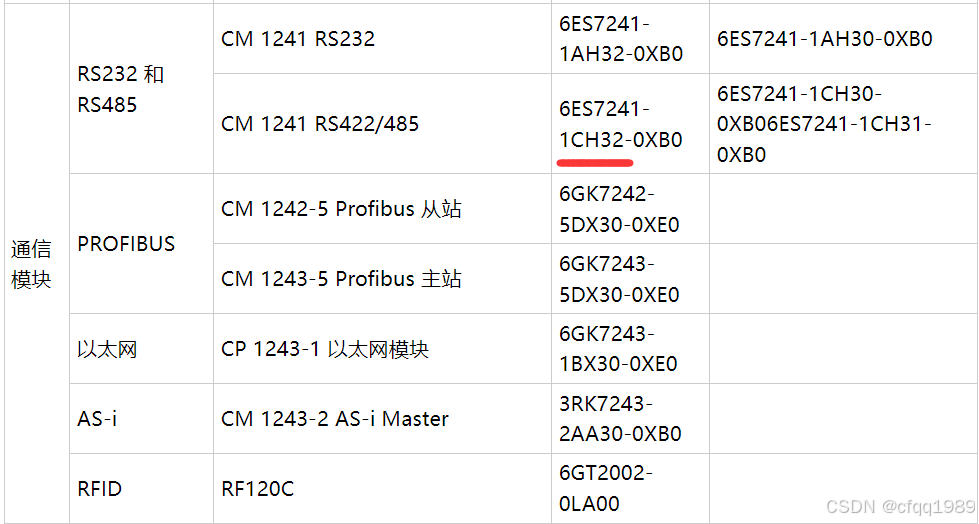
CM 1241 RS232 V2.2 订货号:6ES7241-1AH32-0XB0
CM 1241 RS422/485 V2.2 订货号:6ES7241-1CH32-0XB0
CP 1243-1 V3.2.24 订货号:6GK7243-1BX30-0XE0(硬件版本2)
CP 1243-1 V2.1.92 订货号:6GK7243-1BX30-0XE0(硬件版本1)
CM 1243-2 V1.1.26 订货号:3RK7243-2AA30-0XB0
1500:
1511T 订货号:6ES7511-1TL03-0AB0


普通:
主机架最大模块数量:32 个;CPU + 31 个模块
编程语言: LAD,FBD,STL,SCL,GRAPH
F:安全型
C:紧凑型,本体带io
T:运动控制
R/H:冗余型CPU 1511(F),1513(F),1515(F),1516(F), 1517(F),1518(F),1518(F)-4 MFP
带凸轮:
CPU 1511T(F), 1515T(F),1516T(F), 1517T(F),1518T(F)
带C/C++:
CPU 1518(F)-4 PN/DP MFP
紧凑型:
CPU 1511C, 1512C
运动控制:
1511T 订货号:6ES7511-1TL03-0AB0

10.1 S7-1500 运动控制 ............................................................................................................ 227
10.1.1 MC_Power........................................................................................................................ 227
10.1.1.1 MC_Power: 启用/禁用工艺对象...................................................................................... 227
10.1.1.2 MC_Power: 功能图 ........................................................................................................ 232
10.1.2 MC_Home ........................................................................................................................ 233
10.1.2.1 MC_Home: 归位工艺对象,设置归位位置 ..................................................................... 233
10.1.3 MC_MoveJog ................................................................................................................... 239
10.1.3.1 MC_MoveJog: 在点动模式下移动轴............................................................................... 239
10.1.3.2 MC_MoveJog:功能图..................................................................................................... 244
10.1.4 MC_MoveVelocity............................................................................................................. 245
10.1.4.1 MC_MoveVelocity: 以指定的速度移动轴........................................................................ 245
10.1.4.2 MC_MoveVelocity:功能图 .............................................................................................. 251
10.1.5 MC_MoveRelative ............................................................................................................ 252
10.1.5.1 MC_MoveRelative: 轴的相对定位 .................................................................................. 252
10.1.5.2 MC_MoveRelative:功能图.............................................................................................. 257
10.1.6 MC_MoveAbsolute ........................................................................................................... 258
10.1.6.1 MC_MoveAbsolute: 轴的绝对定位 ................................................................................. 258
10.1.6.2 MC_MoveAbsolute:功能图............................................................................................. 263
10.1.7 MC_Halt ........................................................................................................................... 264
10.1.7.1 MC_Halt: 停止轴 ............................................................................................................ 264
10.1.7.2 MC_Halt:功能图 ............................................................................................................. 268
10.1.8 MC_Reset ........................................................................................................................ 269
10.1.8.1 MC_Reset: 确认报警,重新启动工艺对象 ..................................................................... 269 
















 2882
2882

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









