




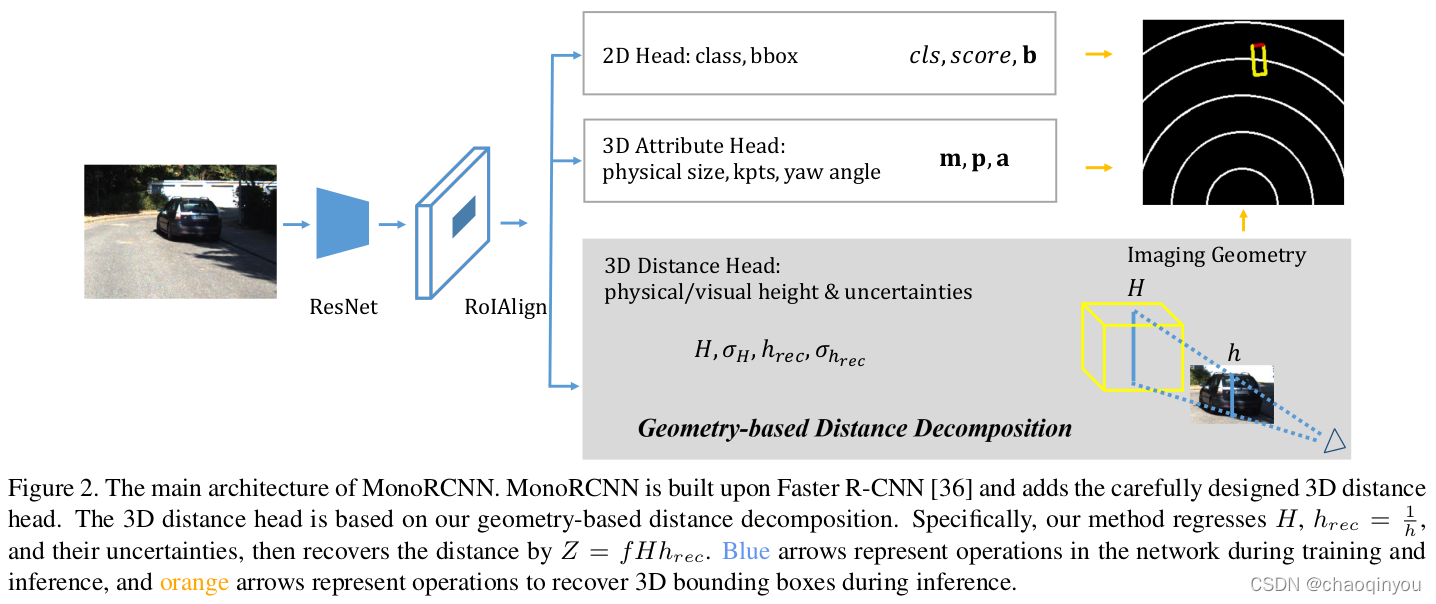
好思路:不直接regression深度,而是regression 3D框高度在图片上的投影,再用相似三角形算出深度;
 http://openaccess.thecvf.com//content/ICCV2021/papers/Shi_Geometry-Based_Distance_Decomposition_for_Monocular_3D_Object_Detection_ICCV_2021_paper.pdf
http://openaccess.thecvf.com//content/ICCV2021/papers/Shi_Geometry-Based_Distance_Decomposition_for_Monocular_3D_Object_Detection_ICCV_2021_paper.pdf
实现:
好思路:不直接regression深度,而是regression 3D框高度在图片上的投影,再用相似三角形算出深度;
实现:
 1072
3789
1586
7990
1072
3789
1586
7990

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























