









PVTV2–Pyramid Vision TransformerV2学习笔记
PVTv2: Improved Baselines with Pyramid Vision Transformer
Abstract
Transformer最近在计算机视觉方面取得了令人鼓舞的进展。在这项工作中,我们通过添加三种设计来改进原始金字塔视觉变换器(PVTv1),提出了新的基线,包括**(1)线性复杂度注意层,(2)重叠面片嵌入和(3)卷积前馈网络**。通过这些修改,PVTv2将PVTv1的计算复杂度降低为线性,并在基本视觉任务(如分类、检测和分割)上实现了显著改进。值得注意的是,拟议的PVTv2实现了与最近的工作(如Swin变压器)相当或更好的性能。我们希望这项工作将促进计算机视觉领域最先进的变压器研究。代码位于https://github.com/whai362/PVT.
1. Introduction
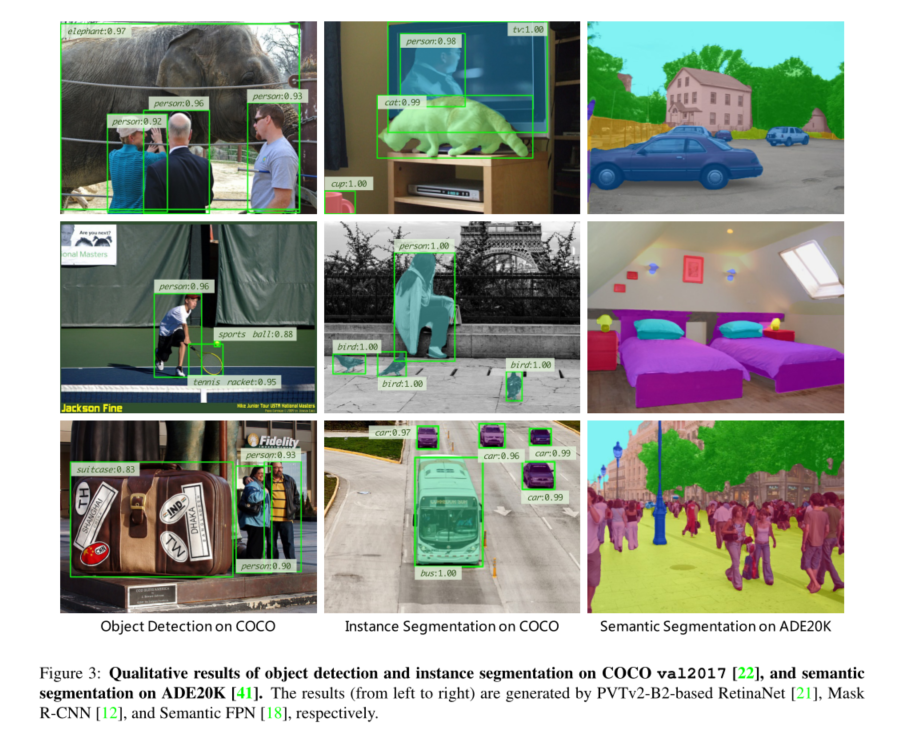
最近关于视觉变换器的研究正在汇聚在主干网络[8、31、33、34、23、36、10、5]上,该主干网络用于下游视觉任务,例如图像分类、对象检测、实例和语义分割。迄今为止,已经取得了一些有希望的结果。例如,视觉变换器(ViT)[8]首先证明了纯变换器可以在图像分类中保持最先进的性能。金字塔视觉变换器(PVTv1)[33]表明,纯变换器主干在密集预测任务(如检测和分割任务)[22,41,?]方面也可以超过CNN。之后,Swin Transformer[23]、CoaT[36]、LeViT[10]和Twins[5]进一步提高了Transformer主干的分类、检测和分割性能。
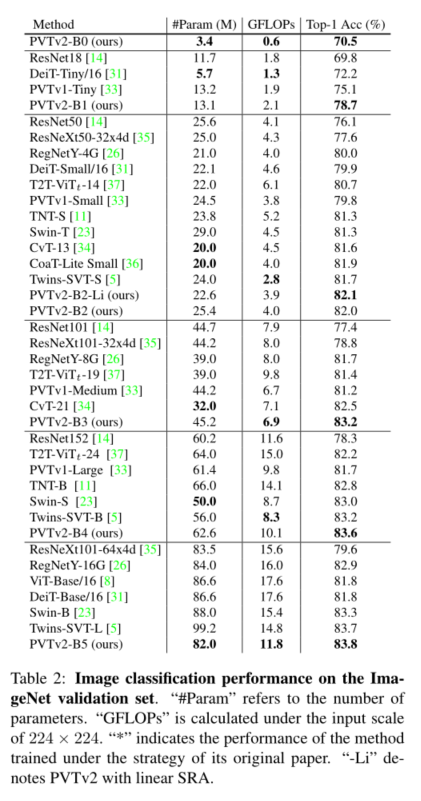
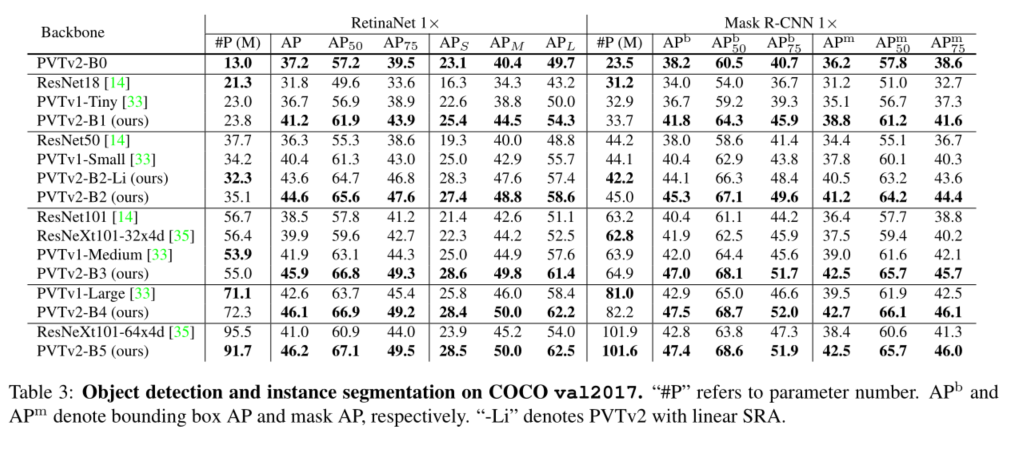
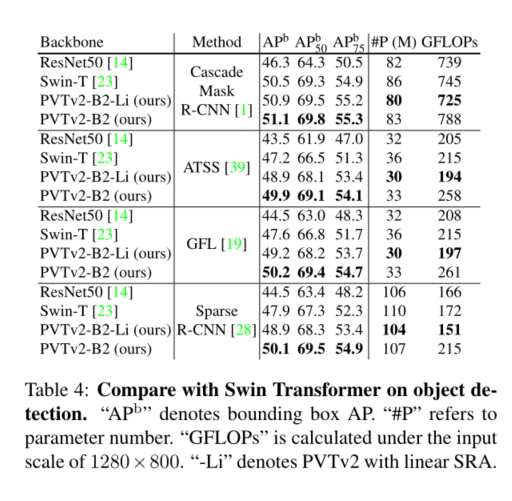
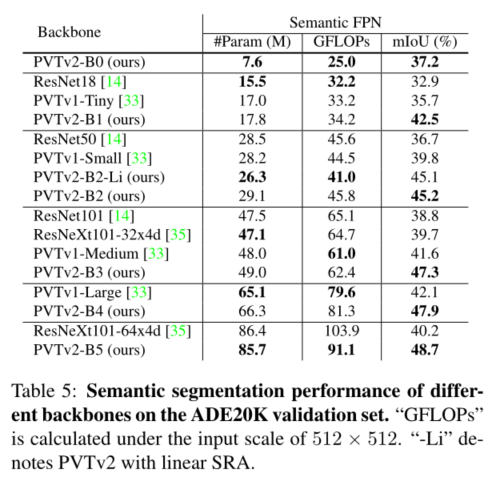
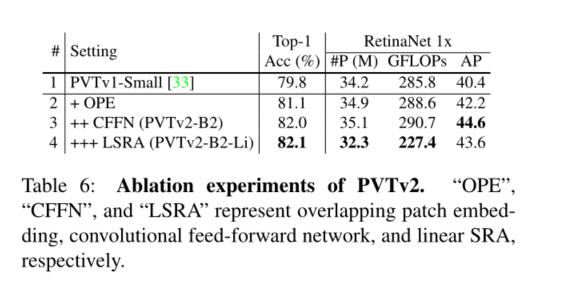
这项工作的目的是在PVTv1框架上建立更强大、更可行的基线。我们报告了三种设计改进,即**(1)线性复杂度注意层、(2)重叠面片嵌入和(3)卷积前馈网络与PVTv1框架正交**,当与PVTv1一起使用时,它们可以带来更好的图像分类、对象检测、实例和语义分割性能。改进后的框架称为PVTv2。具体来说,PVTv2-B51在ImageNet上产生83.8%的top-1误差,优于Swin-B[23]和Twins-SVT-L[5],而我们的模型具有更少的参数和GFLOP。此外,具有PVT-B2的GFL[19]在COCO val2017上记录了50.2 AP,比具有Swin-T的GFL[23]高2.6 AP,比具有ResNet50的GFL[13]高5.7 AP。我们希望这些改进的基线将为未来视觉转换器的研究提供参考。
2. Related Work
我们主要讨论与本工作相关的变压器主干。ViT[8]将每个图像视为具有固定长度的令牌序列(面片),然后将其馈送到多个Transformer层以执行分类。这是首次证明,当训练数据足够时(例如ImageNet-22k[7],JFT300M),纯Transformer也可以在图像分类中存档最先进的性能。DeiT[31]进一步探索了ViT的数据高效训练策略和蒸馏方法。
为了提高图像分类性能,最近的方法对ViT进行了定制更改。T2T ViT[37]将重叠滑动窗口内的令牌逐步连接为一个令牌。TNT[11]利用内部和外部变换块分别生成像素和面片嵌入。CPVT[6]用条件位置编码取代了ViT中固定大小的位置嵌入,使处理任意分辨率的图像变得更容易。CrossViT[2]通过双分支变压器处理不同大小的图像块。LocalViT[20]将深度卷积合并到视觉变换器中,以改善特征的局部连续性。
适应密集预测任务,如对象数据识别,实例和语义分割,还有一些方法[33、23、34、36、10、5]将CNN中的金字塔结构引入变压器主干的设计。PVTv1是第一个金字塔结构变换器,它提出了一个具有四个阶段的层次变换器,表明纯变换器主干可以像CNN主干一样通用,并且在检测和分割任务中表现更好。然后,对[23、34、36、10、5]进行了一些改进,以增强特征的局部连续性,并消除固定大小的位置嵌入。例如,Swin Transformer[23]用相对位置偏差取代了固定大小的位置嵌入,并限制了移动窗口内的自注意力。CvT[34]、CoaT[36]和LeViT[10]将卷积运算引入视觉变换器。Twins[5]将局部注意力和全局注意力机制相结合,以获得更强的特征表示。
3. Methodology
3.1. Limitations in PVTv1
PVTv1[33]有三个主要限制:(1)与ViT[8]类似,当处理高分辨率输入(例如,短边为800像素)时,PVTv1的计算复杂度相对较大。(2) PVTv1[33]将图像视为非重叠面片序列,这在一定程度上失去了图像的局部连续性;(3) PVTv1中的位置编码是固定大小的,对于任意大小的处理图像来说是不灵活的。这些问题限制了PVTv1在视觉任务上的性能。
为了解决这些问题,我们提出了PVTv2,它通过第3.2、3.3和3.4节中列出的三种设计改进了PVTv1。
3.2. Linear Spatial Reduction Attention
首先,为了减少注意力操作引起的高计算成本,我们提出了线性空间注意力 (SRA)层如图1所示。与使用卷积进行空间缩减的SRA[33]不同,线性SRA在注意力操作之前使用平均池将空间维度(即h×w)减少到固定大小(即P×P)。因此,线性SRA像卷积层一样具有线性计算和内存成本。具体来说,给定大小为h×w×c的输入,SRA和线性SRA的复杂度为:
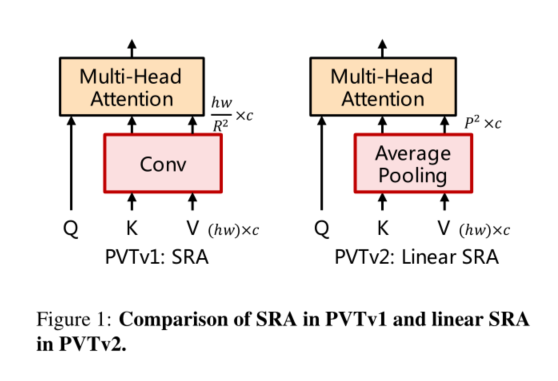
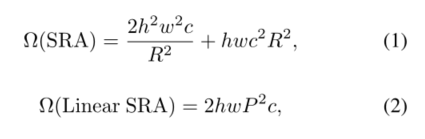
其中R是SRA的空间缩减率[33]。P是线性SRA的池大小,设置为7。
3.3. Overlapping Patch Embedding
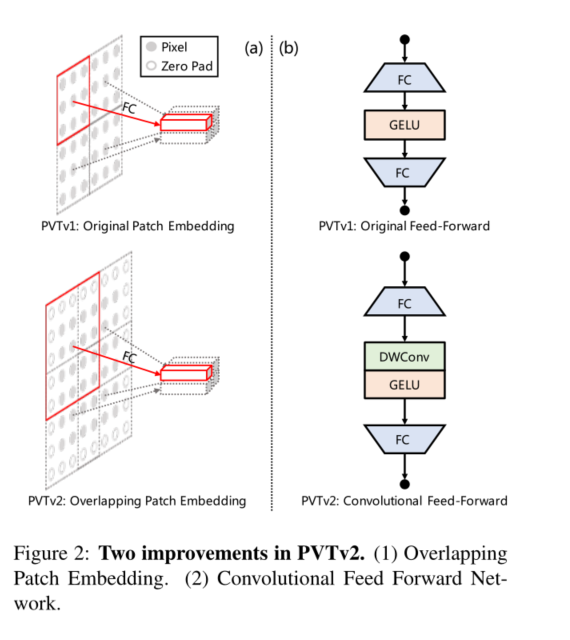
其次,为了建模局部连续性信息,我们利用重叠面片嵌入来标记图像。如图2(a)所示,**我们放大了面片窗口,使相邻窗口重叠一半的面积,并用零填充特征图以保持分辨率。在这项工作中,我们使用零填充卷积来实现重叠面片嵌入。**具体来说,给定一个大小为h×w×c的输入,我们将其输入到S步长的卷积中,核大小为2S− 1.S− 1的填充大小和 c ′ c^{'} c′的核数。输出大小为 h / S × w / S × C ′ h/S×w/S×C^{'} h/S×w/S×C′。
3.4. Convolutional Feed-Forward
**第三,受[17,6,20]的启发,我们删除了固定大小的位置编码[8],并将零填充位置编码引入到PVT中。**如图2(b)所示,我们在前馈网络中的第一个完全连接(FC)层和GELU[15]之间添加了3×3深度卷积[16],填充大小为1。
3.5. Details of PVTv2 Series
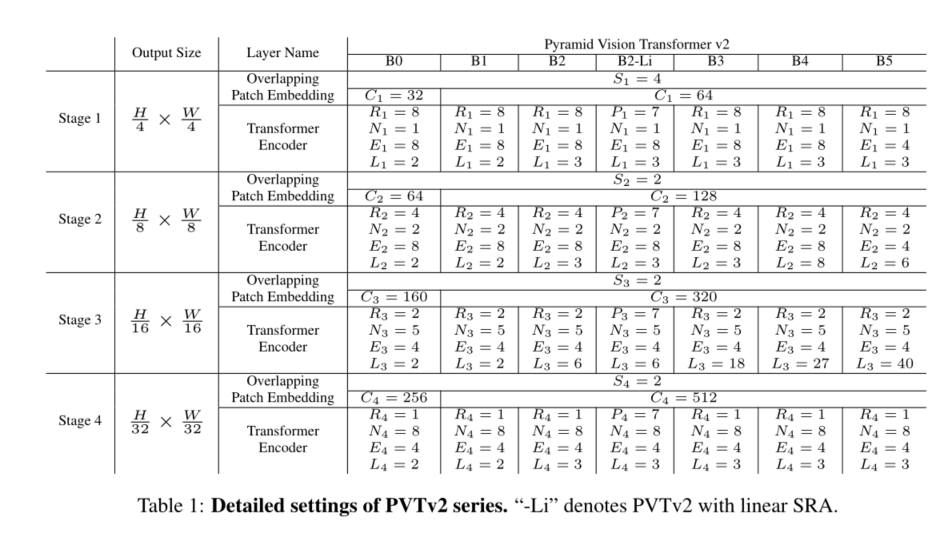
我们通过改变超参数将PVTv2从B0扩展到B5。具体如下:
S i S_i Si:第一阶段重叠面片嵌入的步长
C i C_i Ci:第一阶段输出的通道数
L i L_i Li:第一阶段的编码器层数
R i R_i Ri:第一阶段SRA的减速比
P i P_i Pi:阶段i中线性SRA的自适应平均池大小
N i N_i Ni:第一阶段有效自我注意的头数
E i E_i Ei:第一阶段前馈层[32]的膨胀比;
选项卡。1显示了PVTv2系列的详细信息。我们的设计遵循ResNet[14]的原则。(1) 随着层的加深,通道维数增加,而空间分辨率收缩。(2) 第3阶段分配给大部分计算成本。
3.6. Advantages of PVTv2
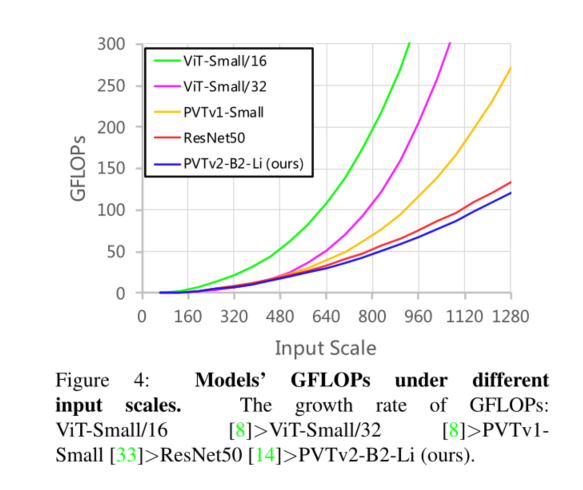
结合这些改进,PVTv2可以**(1)获得更多图像和特征地图的局部连续性;(2) 更灵活地处理可变分辨率输入;(3) 享受与CNN相同的线性复杂度。**
4. Experiment
5. Conclusion
我们研究了金字塔视觉变换器(PVTv1)的局限性,并通过三种设计对其进行了改进,即重叠面片嵌入、卷积前馈网络和线性空间归约注意层。在图像分类、目标检测和语义分割等不同任务上的大量实验表明,在相同数量的参数下,所提出的PVTv2比其前身PVT和其他最先进的基于变换器的主干更强。我们希望这些改进的基线将为未来视觉转换器的研究提供参考。















 3847
3847











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









